Você também pode gostar
- High Throughput, Parallel, Scalable LDPC Encoder/Decoder Architecture For Ofdm SystemsDocumento4 páginasHigh Throughput, Parallel, Scalable LDPC Encoder/Decoder Architecture For Ofdm Systemssandeepkarnati11Ainda não há avaliações
- Node Clustering Technology For Enhancement The Quality of Service of Wireless NetworkDocumento13 páginasNode Clustering Technology For Enhancement The Quality of Service of Wireless Networkindex PubAinda não há avaliações
- Flexible, Cost-Efficient, High-Throughput Architecture For Layered LDPC Decoders With Fully-Parallel Processing UnitsDocumento8 páginasFlexible, Cost-Efficient, High-Throughput Architecture For Layered LDPC Decoders With Fully-Parallel Processing UnitsAnupam DasAinda não há avaliações
- Design and Implementation of Signal Processing Unit For Two-Way Relay Node in MIMO-SDM-PNC SystemDocumento7 páginasDesign and Implementation of Signal Processing Unit For Two-Way Relay Node in MIMO-SDM-PNC Systemhuuphuc292_851873904Ainda não há avaliações
- Network Coding Over A Noisy Relay: A Belief Propagation ApproachDocumento4 páginasNetwork Coding Over A Noisy Relay: A Belief Propagation ApproachStratos PsAinda não há avaliações
- Novel MIMO Detection Algorithm For High-Order Constellations in The Complex DomainDocumento14 páginasNovel MIMO Detection Algorithm For High-Order Constellations in The Complex DomainssivabeAinda não há avaliações
- ICT19 Thuong PaperDocumento7 páginasICT19 Thuong PaperTiến Anh VũAinda não há avaliações
- A Hybrid Parallel SOM Algorithm For Large Maps in Data-MiningDocumento11 páginasA Hybrid Parallel SOM Algorithm For Large Maps in Data-MiningrammhtoAinda não há avaliações
- Near-Ml Detection in Massive Mimo Systems With One-Bit Adcs: Algorithm and Vlsi DesignDocumento5 páginasNear-Ml Detection in Massive Mimo Systems With One-Bit Adcs: Algorithm and Vlsi DesignNguyễn Minh TrìnhAinda não há avaliações
- A New Parallel Version of The DDSCAT Code For Electromagnetic Scattering From Big TargetsDocumento5 páginasA New Parallel Version of The DDSCAT Code For Electromagnetic Scattering From Big TargetsMartín FigueroaAinda não há avaliações
- Multiplexer and DemultiplexerDocumento12 páginasMultiplexer and Demultiplexermarck_camamaAinda não há avaliações
- Cdma-Based Network-On-Chip Architecture: Daewook Kim, Manho Kim and Gerald E. SobelmanDocumento4 páginasCdma-Based Network-On-Chip Architecture: Daewook Kim, Manho Kim and Gerald E. SobelmanVijay DhoneAinda não há avaliações
- MapReduce Algorithms For K-Means ClusteringDocumento11 páginasMapReduce Algorithms For K-Means ClusteringfahmynadhifAinda não há avaliações
- Text Clustering and Validation For Web Search ResultsDocumento7 páginasText Clustering and Validation For Web Search ResultsInternational Journal of Application or Innovation in Engineering & ManagementAinda não há avaliações
- Machine Learning AssignmentDocumento8 páginasMachine Learning AssignmentJoshuaDownesAinda não há avaliações
- Bora2008 PerformanceDocumento4 páginasBora2008 PerformanceDhila UlfaAinda não há avaliações
- Insem2 SchemeDocumento6 páginasInsem2 SchemeBalathrinath ReddyAinda não há avaliações
- Performance Analysis of Decode-and-Forward Relay Network Under Adaptive M-QAMDocumento5 páginasPerformance Analysis of Decode-and-Forward Relay Network Under Adaptive M-QAMballmerAinda não há avaliações
- MATLABPortfolioDocumento3 páginasMATLABPortfolioEmmanuel AtokoAinda não há avaliações
- Illuminating The Structure Code and Decoder Parallel Concatenated Recursive Systematic CodesDocumento6 páginasIlluminating The Structure Code and Decoder Parallel Concatenated Recursive Systematic Codessinne4Ainda não há avaliações
- OFDM Simulation EE810Documento18 páginasOFDM Simulation EE810Ashique Mahmood100% (1)
- Content PDFDocumento14 páginasContent PDFrobbyyuAinda não há avaliações
- Kiran Gunnam, Weihuang Wang, Euncheol Kim, Gwan Choi, Mark YearyDocumento6 páginasKiran Gunnam, Weihuang Wang, Euncheol Kim, Gwan Choi, Mark YearypathmakerpkAinda não há avaliações
- Kai Labusch, Erhardt Barth and Thomas Martinetz - Learning Data Representations With Sparse Coding Neural GasDocumento6 páginasKai Labusch, Erhardt Barth and Thomas Martinetz - Learning Data Representations With Sparse Coding Neural GasTuhmaAinda não há avaliações
- Structured Lattice Codes For Mimo Interference Channel: Song-Nam Hong Giuseppe CaireDocumento5 páginasStructured Lattice Codes For Mimo Interference Channel: Song-Nam Hong Giuseppe CaireBakoury1Ainda não há avaliações
- Design of Spreading Permutations For MIMO-CDMA Based On Space-Time Block CodesDocumento3 páginasDesign of Spreading Permutations For MIMO-CDMA Based On Space-Time Block CodesBalaram KvAinda não há avaliações
- Logarithmic Multiplier in Hardware Implementation of Neural NetworksDocumento12 páginasLogarithmic Multiplier in Hardware Implementation of Neural NetworksSohan SaiAinda não há avaliações
- A Novel Approach For Finding Optimal Number of Cluster Head in Wireless Sensor NetworkDocumento5 páginasA Novel Approach For Finding Optimal Number of Cluster Head in Wireless Sensor NetworkbhanupartapsharmaAinda não há avaliações
- Interconnection Networks: Crossbar Switch, Which Can Simultaneously Connect Any Set ofDocumento11 páginasInterconnection Networks: Crossbar Switch, Which Can Simultaneously Connect Any Set ofgk_gbuAinda não há avaliações
- An Adaptive Opportunistic Routing SchemeDocumento13 páginasAn Adaptive Opportunistic Routing SchemeMohit SnggAinda não há avaliações
- International Refereed Journal of Engineering and Science (IRJES)Documento8 páginasInternational Refereed Journal of Engineering and Science (IRJES)www.irjes.comAinda não há avaliações
- Iterative Data Detection and Channel Estimation For Single-Parity Check-Product Coded MIMO Wireless Communications SystemDocumento5 páginasIterative Data Detection and Channel Estimation For Single-Parity Check-Product Coded MIMO Wireless Communications SystemIsa FirmantoAinda não há avaliações
- Logika Kombinasi II (Lie)Documento10 páginasLogika Kombinasi II (Lie)Desi NoviantiAinda não há avaliações
- Power Allocation in Cooperative Networks Using Differential Space-Time CodesDocumento4 páginasPower Allocation in Cooperative Networks Using Differential Space-Time CodesballmerAinda não há avaliações
- Coding and Modulation Techniques Enabling Multi-Tb/s Optical EthernetDocumento2 páginasCoding and Modulation Techniques Enabling Multi-Tb/s Optical EthernetAnthony WellsAinda não há avaliações
- SNA Report1 PDFDocumento9 páginasSNA Report1 PDFGabrielAinda não há avaliações
- NCO TutorialDocumento3 páginasNCO TutorialHoàng Hữu Mạnh100% (1)
- MultiplexerDocumento16 páginasMultiplexerPARTEEK RANAAinda não há avaliações
- Plagiarism Checker X Originality: Similarity Found: 22%Documento9 páginasPlagiarism Checker X Originality: Similarity Found: 22%alisha DhawanAinda não há avaliações
- Large Margin Multi Channel Analog To Digital Conversion With Applications To Neural ProsthesisDocumento8 páginasLarge Margin Multi Channel Analog To Digital Conversion With Applications To Neural ProsthesisAdrian PostavaruAinda não há avaliações
- ++probleme TotDocumento22 páginas++probleme TotRochelle ByersAinda não há avaliações
- Adaptive Dist CodingDocumento5 páginasAdaptive Dist Codingabyss2000Ainda não há avaliações
- An Efficient Temporal Partitioning Algorithm To Minimize Communication Cost For Reconfigurable Computing SystemsDocumento11 páginasAn Efficient Temporal Partitioning Algorithm To Minimize Communication Cost For Reconfigurable Computing SystemsInternational Journal of New Computer Architectures and their Applications (IJNCAA)Ainda não há avaliações
- Software-Defined Radio Lab 2: Data Modulation and TransmissionDocumento8 páginasSoftware-Defined Radio Lab 2: Data Modulation and TransmissionpaulCGAinda não há avaliações
- Neural Enquirer: Learning To Query Tables With Natural LanguageDocumento19 páginasNeural Enquirer: Learning To Query Tables With Natural Languagea4104165Ainda não há avaliações
- Parallel Mapreduce: K - Means Clustering Based OnDocumento6 páginasParallel Mapreduce: K - Means Clustering Based OnAshishAinda não há avaliações
- Efficient Implementation of A Pseudorandom Sequence Generator For High-Speed Data CommunicationsDocumento8 páginasEfficient Implementation of A Pseudorandom Sequence Generator For High-Speed Data CommunicationsRekhaPadmanabhanAinda não há avaliações
- Network Coding-Based ARQ Scheme With Overlapping Selection For Resource Limited Multicast/Broadcast ServicesDocumento6 páginasNetwork Coding-Based ARQ Scheme With Overlapping Selection For Resource Limited Multicast/Broadcast ServicesDhan Raj BandiAinda não há avaliações
- A Result Based Comparison of DSDV, AODV and DSR Routing ProtocolsDocumento4 páginasA Result Based Comparison of DSDV, AODV and DSR Routing ProtocolsresearchinventyAinda não há avaliações
- Injecting Knowledge Into The Solution of The Two-Spiral ProblemDocumento8 páginasInjecting Knowledge Into The Solution of The Two-Spiral ProblemJavierAinda não há avaliações
- A Scalable Decoder Architecture For IEEE 802.11n LDPC CodesDocumento5 páginasA Scalable Decoder Architecture For IEEE 802.11n LDPC CodesSiddhant MehraAinda não há avaliações
- Application of Graph Theory in Communication NetworksDocumento5 páginasApplication of Graph Theory in Communication NetworksInternational Journal of Application or Innovation in Engineering & ManagementAinda não há avaliações
- NRK ParaSolDocumento14 páginasNRK ParaSolLuis ArreguinAinda não há avaliações
- Algorithms For Energy Efficient Reconstruction of A Process With A Multihop Wireless Sensor NetworkDocumento4 páginasAlgorithms For Energy Efficient Reconstruction of A Process With A Multihop Wireless Sensor NetworkCecilia Camarena QuispeAinda não há avaliações
- A Pseudo-Random Bit Generator Using Three Chaotic Logistic MapsDocumento23 páginasA Pseudo-Random Bit Generator Using Three Chaotic Logistic Mapsavi0341Ainda não há avaliações
- Modelling of Stock Prices by The Markov Chain Monte Carlo MethodDocumento13 páginasModelling of Stock Prices by The Markov Chain Monte Carlo MethodPurnima SinghAinda não há avaliações
- Solutions Manual For Digital Communications in PracticeDocumento48 páginasSolutions Manual For Digital Communications in PracticecasdeaAinda não há avaliações
- RT PDFDocumento7 páginasRT PDFVaziel IvansAinda não há avaliações
- Image Compression With Set Partitioning in Hierarchical Trees (Spiht)Documento32 páginasImage Compression With Set Partitioning in Hierarchical Trees (Spiht)Ratna KiranAinda não há avaliações
- A2B1 Unit 11bDocumento2 páginasA2B1 Unit 11bTheToan.Ainda não há avaliações
- The Role of Mahatma Gandhi in The Freedom Movement of IndiaDocumento11 páginasThe Role of Mahatma Gandhi in The Freedom Movement of IndiaSwathi Prasad100% (6)
- Counselling Goes To The Movies: Antwone Fisher (2002)Documento12 páginasCounselling Goes To The Movies: Antwone Fisher (2002)Azizul MohamadAinda não há avaliações
- Public International Law Green Notes 2015Documento34 páginasPublic International Law Green Notes 2015KrisLarr100% (1)
- MINIMENTAL, Puntos de Corte ColombianosDocumento5 páginasMINIMENTAL, Puntos de Corte ColombianosCatalina GutiérrezAinda não há avaliações
- Approach To Vaginal Discharge in ChildrenDocumento12 páginasApproach To Vaginal Discharge in ChildrensujataAinda não há avaliações
- Clinincal Decision Support SystemDocumento10 páginasClinincal Decision Support Systemم. سهير عبد داؤد عسىAinda não há avaliações
- Technique Du Micro-Enseignement Une Approche PourDocumento11 páginasTechnique Du Micro-Enseignement Une Approche PourMohamed NaciriAinda não há avaliações
- BedDocumento17 páginasBedprasadum2321Ainda não há avaliações
- Uptime Elements Passport: GineerDocumento148 páginasUptime Elements Passport: GineerBrian Careel94% (16)
- Lite Touch. Completo PDFDocumento206 páginasLite Touch. Completo PDFkerlystefaniaAinda não há avaliações
- Motion To Strike BasedDocumento16 páginasMotion To Strike BasedForeclosure Fraud100% (1)
- Indg 264.3 w02Documento15 páginasIndg 264.3 w02FrauAinda não há avaliações
- Challenges For Omnichannel StoreDocumento5 páginasChallenges For Omnichannel StoreAnjali SrivastvaAinda não há avaliações
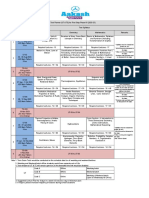
- UT & TE Planner - AY 2023-24 - Phase-01Documento1 páginaUT & TE Planner - AY 2023-24 - Phase-01Atharv KumarAinda não há avaliações
- Progressivism Sweeps The NationDocumento4 páginasProgressivism Sweeps The NationZach WedelAinda não há avaliações
- Research Paper 701Documento13 páginasResearch Paper 701api-655942045Ainda não há avaliações
- Theater 10 Syllabus Printed PDFDocumento7 páginasTheater 10 Syllabus Printed PDFJim QuentinAinda não há avaliações
- The Hawthorne Studies RevisitedDocumento25 páginasThe Hawthorne Studies Revisitedsuhana satijaAinda não há avaliações
- Insung Jung An Colin Latchem - Quality Assurance and Acreditatión in Distance Education and e - LearningDocumento81 páginasInsung Jung An Colin Latchem - Quality Assurance and Acreditatión in Distance Education and e - LearningJack000123Ainda não há avaliações
- Sino-Japanese Haikai PDFDocumento240 páginasSino-Japanese Haikai PDFAlina Diana BratosinAinda não há avaliações
- GearsDocumento14 páginasGearsZulhilmi Chik TakAinda não há avaliações
- Islamic Meditation (Full) PDFDocumento10 páginasIslamic Meditation (Full) PDFIslamicfaith Introspection0% (1)
- Mathsnacks05 InfiniteDocumento1 páginaMathsnacks05 Infiniteburkard.polsterAinda não há avaliações
- Affirmative (Afirmativa) Long Form Short Form PortuguêsDocumento3 páginasAffirmative (Afirmativa) Long Form Short Form PortuguêsAnitaYangAinda não há avaliações
- Case Study 1 (Pneumonia)Documento13 páginasCase Study 1 (Pneumonia)Kate EscotonAinda não há avaliações
- FJ&GJ SMDocumento30 páginasFJ&GJ SMSAJAHAN MOLLAAinda não há avaliações
- Yukot,+houkelin 2505 11892735 Final+Paper+Group+41Documento17 páginasYukot,+houkelin 2505 11892735 Final+Paper+Group+410191720003 ELIAS ANTONIO BELLO LEON ESTUDIANTE ACTIVOAinda não há avaliações
- 38 Bayan Muna Vs MendozaDocumento3 páginas38 Bayan Muna Vs MendozaDavid Antonio A. EscuetaAinda não há avaliações
- 576 1 1179 1 10 20181220Documento15 páginas576 1 1179 1 10 20181220Sana MuzaffarAinda não há avaliações