Você também pode gostar
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeNo EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeNota: 4 de 5 estrelas4/5 (5794)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreNo EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreNota: 4 de 5 estrelas4/5 (1090)
- Never Split the Difference: Negotiating As If Your Life Depended On ItNo EverandNever Split the Difference: Negotiating As If Your Life Depended On ItNota: 4.5 de 5 estrelas4.5/5 (838)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceNo EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceNota: 4 de 5 estrelas4/5 (895)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersNo EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersNota: 4.5 de 5 estrelas4.5/5 (345)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureNo EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureNota: 4.5 de 5 estrelas4.5/5 (474)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)No EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Nota: 4.5 de 5 estrelas4.5/5 (121)
- The Emperor of All Maladies: A Biography of CancerNo EverandThe Emperor of All Maladies: A Biography of CancerNota: 4.5 de 5 estrelas4.5/5 (271)
- The Little Book of Hygge: Danish Secrets to Happy LivingNo EverandThe Little Book of Hygge: Danish Secrets to Happy LivingNota: 3.5 de 5 estrelas3.5/5 (400)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyNo EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyNota: 3.5 de 5 estrelas3.5/5 (2259)
- The Yellow House: A Memoir (2019 National Book Award Winner)No EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Nota: 4 de 5 estrelas4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaNo EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaNota: 4.5 de 5 estrelas4.5/5 (266)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryNo EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryNota: 3.5 de 5 estrelas3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnNo EverandTeam of Rivals: The Political Genius of Abraham LincolnNota: 4.5 de 5 estrelas4.5/5 (234)
- The Unwinding: An Inner History of the New AmericaNo EverandThe Unwinding: An Inner History of the New AmericaNota: 4 de 5 estrelas4/5 (45)
- QAP-09 Equipment CalibrationDocumento20 páginasQAP-09 Equipment Calibrationnaseema1100% (5)
- MKP 18-10000 Rev 6 YPS PDFDocumento48 páginasMKP 18-10000 Rev 6 YPS PDFMalek AbourawiAinda não há avaliações
- Oversizing of Solaredge Inverters, Technical NoteDocumento1 páginaOversizing of Solaredge Inverters, Technical NoteMohammad HamamdAinda não há avaliações
- Transistor Examples PDFDocumento16 páginasTransistor Examples PDFGuganesan PerumalAinda não há avaliações
- 11B2 14 NF Smart Entry and Start System VNDocumento41 páginas11B2 14 NF Smart Entry and Start System VNMinh Nhat Phan100% (3)
- List of True 16 9 ResolutionsDocumento19 páginasList of True 16 9 ResolutionsryuAinda não há avaliações
- G6 Electricity and Magnetism - Revision Booklet and ANSDocumento21 páginasG6 Electricity and Magnetism - Revision Booklet and ANSAhad AliAinda não há avaliações
- 02 - Modulo-5 CounterDocumento4 páginas02 - Modulo-5 CounterUsman QadeerAinda não há avaliações
- 2011 - Indian DatabaseDocumento33 páginas2011 - Indian DatabaseGhanta SinghAinda não há avaliações
- Blu-Ray Disc™/ DVD Home Theatre System: Operating InstructionsDocumento68 páginasBlu-Ray Disc™/ DVD Home Theatre System: Operating InstructionsKamal FaridAinda não há avaliações
- Chapter 10: Vibration Isolation of The SourceDocumento12 páginasChapter 10: Vibration Isolation of The SourceAshokAinda não há avaliações
- Zeeman EffectDocumento5 páginasZeeman Effectjsebas635Ainda não há avaliações
- LG Gce 8525b Owner's ManualDocumento2 páginasLG Gce 8525b Owner's ManualApocalypseAinda não há avaliações
- The Electromagnetic Spectrum by Cindy GriggDocumento2 páginasThe Electromagnetic Spectrum by Cindy GriggMae Dil G. Tirariray - PaladAinda não há avaliações
- NOJA-5002-08 OSM15 310, OSM27 310, OSM38 300 and RC10 Controller User Manual - Print (Adobe) PDFDocumento208 páginasNOJA-5002-08 OSM15 310, OSM27 310, OSM38 300 and RC10 Controller User Manual - Print (Adobe) PDFNhat Nguyen Van100% (1)
- Assignment Switch Gear and Protection (3360901)Documento2 páginasAssignment Switch Gear and Protection (3360901)Madhuri chavanAinda não há avaliações
- Loop Impedance - B2Documento8 páginasLoop Impedance - B2madhavanAinda não há avaliações
- Inter Plant Standard - Steel IndustryDocumento5 páginasInter Plant Standard - Steel IndustryGopalMahantaAinda não há avaliações
- Siemens Se 55a590-45 Sgs57m12ff17 Reparation-ManualDocumento67 páginasSiemens Se 55a590-45 Sgs57m12ff17 Reparation-ManualD²EMAinda não há avaliações
- Quartz Crystal Filter GuideDocumento10 páginasQuartz Crystal Filter Guidedenkins2020Ainda não há avaliações
- E7520 E7320 Chipsets BriefDocumento4 páginasE7520 E7320 Chipsets BriefJhon ErickAinda não há avaliações
- Fisa Tehnica Modul de Back-Up Monofazat Pentru Sisteme Fotovoltaice Huawei Backup Box-B0Documento1 páginaFisa Tehnica Modul de Back-Up Monofazat Pentru Sisteme Fotovoltaice Huawei Backup Box-B0Ion IonitaAinda não há avaliações
- Books in The Ieee Press Series On Power EngineeringDocumento490 páginasBooks in The Ieee Press Series On Power EngineeringFranklin CutocaAinda não há avaliações
- HDS 5/11 U/UX Service Manual: English 5.906-487.0 Rev. 00 (04/10)Documento50 páginasHDS 5/11 U/UX Service Manual: English 5.906-487.0 Rev. 00 (04/10)Jose Maria Castro PazosAinda não há avaliações
- SBS FM30 Manual (29-06-06) PDFDocumento37 páginasSBS FM30 Manual (29-06-06) PDFK.S. BalasubramaniamAinda não há avaliações
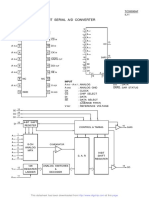
- C-Mos 8-Channel 8-Bit Serial A/D Converter: 9 7 6 5 4 3 2 1 A A A A A A A A 15 DODocumento1 páginaC-Mos 8-Channel 8-Bit Serial A/D Converter: 9 7 6 5 4 3 2 1 A A A A A A A A 15 DOAsep TatangAinda não há avaliações
- 4730 0013 04bDocumento966 páginas4730 0013 04bDoron ForshtatAinda não há avaliações
- Manual LZR H100Documento16 páginasManual LZR H100Julio BunburyAinda não há avaliações