Você também pode gostar
- A Genetic Algorithmic Approach For Optimization of Surface Roughness Prediction Model 2002 International Journal of Machine Tools and ManufactureDocumento6 páginasA Genetic Algorithmic Approach For Optimization of Surface Roughness Prediction Model 2002 International Journal of Machine Tools and ManufactureBlancaliz HigashinoAinda não há avaliações
- Dabwan 2020Documento15 páginasDabwan 2020Rhahli JamelAinda não há avaliações
- Che Do Cat1Documento7 páginasChe Do Cat1Giang Hoai VuAinda não há avaliações
- Domínguez-Rodríguez2018 Article AnAssessmentOfTheEffectOfPrintDocumento11 páginasDomínguez-Rodríguez2018 Article AnAssessmentOfTheEffectOfPrintdavid friasAinda não há avaliações
- Filtering Denoising GrindingDocumento15 páginasFiltering Denoising GrindingBilelennourAinda não há avaliações
- A Hybrid Analytical-And Discrete-Based Methodology For Determining Cutter-Workpiece Engagement in Five-Axis MillingDocumento2 páginasA Hybrid Analytical-And Discrete-Based Methodology For Determining Cutter-Workpiece Engagement in Five-Axis MillingEdinAinda não há avaliações
- Artículo - IJAMT 2016Documento15 páginasArtículo - IJAMT 2016Carlos Andrés Arango H.Ainda não há avaliações
- Redrawing of Sheet Metals - ElsevierDocumento8 páginasRedrawing of Sheet Metals - ElsevierhappyfurladyAinda não há avaliações
- Analysis of PLA Geometric Properties Processed by FFF Additive Manufacturing Effects of Process Parameters and Plate-Extruder Precision MotionDocumento20 páginasAnalysis of PLA Geometric Properties Processed by FFF Additive Manufacturing Effects of Process Parameters and Plate-Extruder Precision MotiongandorcAinda não há avaliações
- Nataraj An 2011Documento9 páginasNataraj An 2011amsubra8874Ainda não há avaliações
- Ijmer 46064551 PDFDocumento7 páginasIjmer 46064551 PDFIJMERAinda não há avaliações
- Machines 09 00192 v2Documento16 páginasMachines 09 00192 v2Mateusz RojewskiAinda não há avaliações
- Experimental Study Aiming To Enhance The Surface Finish of Fused Deposition Modeled PartsDocumento4 páginasExperimental Study Aiming To Enhance The Surface Finish of Fused Deposition Modeled Partsnewkid2202Ainda não há avaliações
- 4613 Surface Integrity Functional Analysis in Hard Turning AISI 8620 Case Hardened Steel Through 3D Topographical MeasurementDocumento6 páginas4613 Surface Integrity Functional Analysis in Hard Turning AISI 8620 Case Hardened Steel Through 3D Topographical MeasurementGilmar BatalhaAinda não há avaliações
- Determination of Springback in Sheet Metal FormingDocumento6 páginasDetermination of Springback in Sheet Metal FormingThiru MoorthyAinda não há avaliações
- Understanding Surface Quality Beyond Average Roughness RaDocumento20 páginasUnderstanding Surface Quality Beyond Average Roughness RaStefan NikolićAinda não há avaliações
- Visvesvaraya Technological University: Belgaum-590 014Documento11 páginasVisvesvaraya Technological University: Belgaum-590 014Niranjan HugarAinda não há avaliações
- Karpuschewski 2018 IOP Conf. Ser. Mater. Sci. Eng. 448 012056Documento12 páginasKarpuschewski 2018 IOP Conf. Ser. Mater. Sci. Eng. 448 012056Chiheb BaAinda não há avaliações
- Acayaba 2015Documento6 páginasAcayaba 2015Azaath AzuAinda não há avaliações
- Surface Roughness Model For St37Documento4 páginasSurface Roughness Model For St37fitraskaAinda não há avaliações
- Semi-Automated Gating System Design With Optimum Gate and Over Flow Positions For Aluminum HPDCDocumento15 páginasSemi-Automated Gating System Design With Optimum Gate and Over Flow Positions For Aluminum HPDCsobheysaidAinda não há avaliações
- Predicting Surface RoughnessDocumento12 páginasPredicting Surface RoughnessGek CagatanAinda não há avaliações
- Eng P501-103Documento13 páginasEng P501-103tomica06031969Ainda não há avaliações
- Surface Roughness Perfection by CAM InterpolationsDocumento14 páginasSurface Roughness Perfection by CAM InterpolationsEl Bechir MsaddekAinda não há avaliações
- Additive Manufacturing of PLA Structures Using Fused DepositionDocumento15 páginasAdditive Manufacturing of PLA Structures Using Fused DepositionMechanical ClassAinda não há avaliações
- Modeling of Material Removal and Surface Roughness in Abrasive Flow Machining ProcessDocumento21 páginasModeling of Material Removal and Surface Roughness in Abrasive Flow Machining ProcessAbdullah Talha TuranAinda não há avaliações
- Multi-Parameter IdentiicationDocumento11 páginasMulti-Parameter IdentiicationmunirajAinda não há avaliações
- Project Report 8th Sem Smrutiranjan SahooDocumento25 páginasProject Report 8th Sem Smrutiranjan SahooKishan DhameliyaAinda não há avaliações
- An Approach For Interlinking Design and Process Planning: M. Kang, J. Han, J.G. MoonDocumento8 páginasAn Approach For Interlinking Design and Process Planning: M. Kang, J. Han, J.G. MoonhaseakashAinda não há avaliações
- Structural Modeling of End Mills For Form Error and Stability AnalysisDocumento11 páginasStructural Modeling of End Mills For Form Error and Stability AnalysisAkhileshwar_singh88Ainda não há avaliações
- A Review On Machining Parameters Influencing The Responses On CNC: An Optimization TechniqueDocumento8 páginasA Review On Machining Parameters Influencing The Responses On CNC: An Optimization TechniquebalajimetturAinda não há avaliações
- A Tool Path Generation Strategy For Three-Axis Ball-End Milling of Free-FormDocumento5 páginasA Tool Path Generation Strategy For Three-Axis Ball-End Milling of Free-FormNipo Produção TextualAinda não há avaliações
- Optimization of Cutting Parameters in CNC Turning: Harish Kumar, Mohd. Abbas, Dr. Aas Mohammad, Hasan Zakir JafriDocumento4 páginasOptimization of Cutting Parameters in CNC Turning: Harish Kumar, Mohd. Abbas, Dr. Aas Mohammad, Hasan Zakir JafriShakeel RanaAinda não há avaliações
- WWW Ijrea ComDocumento8 páginasWWW Ijrea ComudataashutoshAinda não há avaliações
- Sahu 2013Documento16 páginasSahu 2013avt01Ainda não há avaliações
- 2 67 1588140711 16ijmperdjun202016Documento10 páginas2 67 1588140711 16ijmperdjun202016TJPRC PublicationsAinda não há avaliações
- Materials and Design: Anoop Kumar Sood, R.K. Ohdar, S.S. MahapatraDocumento9 páginasMaterials and Design: Anoop Kumar Sood, R.K. Ohdar, S.S. MahapatraRui MatiasAinda não há avaliações
- InTech-Finite Element Analysis of Machining Thin Wall Parts Error Prediction and Stability AnalysisDocumento28 páginasInTech-Finite Element Analysis of Machining Thin Wall Parts Error Prediction and Stability AnalysisLukman EmweAinda não há avaliações
- Six Sigma-Based Approach To Optimize Deep Drawing Operation VariablesDocumento22 páginasSix Sigma-Based Approach To Optimize Deep Drawing Operation Variableswhereischinatown100% (2)
- An Experimental Investigation On Surface Quality and Dimensional Accuracy of FDM Components PDFDocumento7 páginasAn Experimental Investigation On Surface Quality and Dimensional Accuracy of FDM Components PDFnewkid2202Ainda não há avaliações
- Hashemian 2020Documento12 páginasHashemian 2020lzq8306Ainda não há avaliações
- An Analytical Cost Estimation Approach For Generic Sheet Metal 3D ModelsDocumento15 páginasAn Analytical Cost Estimation Approach For Generic Sheet Metal 3D Modelsmis2hijosAinda não há avaliações
- Accepted Manuscript: Underground SpaceDocumento28 páginasAccepted Manuscript: Underground SpacemoeinAinda não há avaliações
- Toolpath Generation For Partition Machining of T-Spline Surface Based On Local RefinementDocumento14 páginasToolpath Generation For Partition Machining of T-Spline Surface Based On Local RefinementJohnson owoichoAinda não há avaliações
- Applied SciencesDocumento14 páginasApplied Sciencessaurav kumar singhAinda não há avaliações
- Application of Response Surface Methodology in Describing The Performance of Coated Carbide Tools When Turning AISI 1045 SteelDocumento13 páginasApplication of Response Surface Methodology in Describing The Performance of Coated Carbide Tools When Turning AISI 1045 SteeladarshgitamAinda não há avaliações
- 10 1 1 96 2641 PDFDocumento20 páginas10 1 1 96 2641 PDFpuhumightAinda não há avaliações
- Development of Hybrid Predictive Models and Optimization Techniques For Machining OperationsDocumento14 páginasDevelopment of Hybrid Predictive Models and Optimization Techniques For Machining OperationsXavier ZukeAinda não há avaliações
- HDFGJFGDocumento10 páginasHDFGJFGKarim KhanAinda não há avaliações
- Vplyv Parametrov Tvárnenia Pri Hydromechanickom Procese Hlbokého Ťahania PlôchDocumento4 páginasVplyv Parametrov Tvárnenia Pri Hydromechanickom Procese Hlbokého Ťahania PlôchZimekAinda não há avaliações
- End Mill Tools Integration in CNC Machining For Rapid Manufacturing Processes Simulation StudiesDocumento16 páginasEnd Mill Tools Integration in CNC Machining For Rapid Manufacturing Processes Simulation StudiesKumar AbhishekAinda não há avaliações
- Ratchev - 2004 - Milling Error Prediction and Compensation in Machining of Low - Rigidity PartsDocumento13 páginasRatchev - 2004 - Milling Error Prediction and Compensation in Machining of Low - Rigidity PartsHui HeAinda não há avaliações
- Procast 2009 Steel ExampleDocumento11 páginasProcast 2009 Steel ExampleKimberly KingAinda não há avaliações
- Wenhan Zeng - AMTDocumento18 páginasWenhan Zeng - AMTsubhromondal2017Ainda não há avaliações
- 7IJAERS 04202153 MathematicalDocumento9 páginas7IJAERS 04202153 MathematicalIJAERS JOURNALAinda não há avaliações
- Chemical Treatment - 90% Dimethylketone and 10% Water - ABS PartsDocumento4 páginasChemical Treatment - 90% Dimethylketone and 10% Water - ABS Partsadityakashyap.pdm22Ainda não há avaliações
- Optimization of CNC Turning Process Parameters On ALUMINIUM 6061 Using Response Surface MethodologyDocumento7 páginasOptimization of CNC Turning Process Parameters On ALUMINIUM 6061 Using Response Surface MethodologybalajimetturAinda não há avaliações
- Materials Science and Technology of Optical FabricationNo EverandMaterials Science and Technology of Optical FabricationAinda não há avaliações
- Manual of Engineering Drawing: British and International StandardsNo EverandManual of Engineering Drawing: British and International StandardsNota: 3.5 de 5 estrelas3.5/5 (4)
- IN804 UV-VIS Nomenclature and UnitsDocumento5 páginasIN804 UV-VIS Nomenclature and UnitsAnurak OnnnoomAinda não há avaliações
- BF V CatalogDocumento56 páginasBF V CatalogmaciasrobAinda não há avaliações
- LED Personal Portable Desk - Group 7-Imtiaz - 31072021Documento8 páginasLED Personal Portable Desk - Group 7-Imtiaz - 31072021SYED AMIRUL NAZMI BIN SYED ANUARAinda não há avaliações
- 226-Article Text-601-1-10-20210702Documento12 páginas226-Article Text-601-1-10-20210702Leni NopriyantiAinda não há avaliações
- Omnifocus ShortcutsDocumento3 páginasOmnifocus ShortcutsLaGouloueAinda não há avaliações
- Apple Witness ListDocumento30 páginasApple Witness ListMikey CampbellAinda não há avaliações
- Module - 5Documento92 páginasModule - 5Anand AAinda não há avaliações
- SITRUST Brochure PDFDocumento8 páginasSITRUST Brochure PDFÐôùxBébê Ðê MãmäñAinda não há avaliações
- Lecture Note On Photovoltaic CellDocumento1 páginaLecture Note On Photovoltaic CellHaseeb NawazAinda não há avaliações
- Morphometric Characterization of Jatropha Curcas Germplasm of North-East IndiaDocumento9 páginasMorphometric Characterization of Jatropha Curcas Germplasm of North-East IndiafanusAinda não há avaliações
- PlumbingDocumento1 páginaPlumbingminesdomieAinda não há avaliações
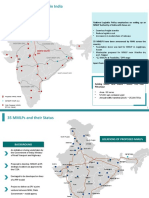
- Development of Mmlps in India: Western DFC Eastern DFCDocumento2 páginasDevelopment of Mmlps in India: Western DFC Eastern DFCsdfg100% (2)
- FWD Week 47 Learning Material For Alaric YeoDocumento7 páginasFWD Week 47 Learning Material For Alaric YeoarielAinda não há avaliações
- Cibse TM65 (2020)Documento67 páginasCibse TM65 (2020)Reli Hano100% (1)
- Rociadores - FT - GFS-100B - GL SeriesDocumento2 páginasRociadores - FT - GFS-100B - GL SeriesJimmy FernándezAinda não há avaliações
- Getting Good Grades in School Is What Kids Are Supposed To Be Doing.Documento6 páginasGetting Good Grades in School Is What Kids Are Supposed To Be Doing.The QUEENAinda não há avaliações
- Aesa Vs PesaDocumento30 páginasAesa Vs Pesakab11512100% (1)
- IG Client Sentiment Report 2020-12-03 12 - 00 PDFDocumento36 páginasIG Client Sentiment Report 2020-12-03 12 - 00 PDFEno Ronaldfrank OguriAinda não há avaliações
- Dubai Holding FactsheetDocumento2 páginasDubai Holding FactsheetHarley soulAinda não há avaliações
- EagleBurgmann H7N ENDocumento5 páginasEagleBurgmann H7N ENlamtony2013Ainda não há avaliações
- Internship Report PDFDocumento11 páginasInternship Report PDFASWIN KUMARAinda não há avaliações
- KrautKramer DM4E DM4DL - ManualDocumento38 páginasKrautKramer DM4E DM4DL - ManualfdsgfdgAinda não há avaliações
- ReadMeCS5 OptionalPluginDocumento6 páginasReadMeCS5 OptionalPluginLuismanuel LuisAinda não há avaliações
- Time Series Data Analysis For Forecasting - A Literature ReviewDocumento5 páginasTime Series Data Analysis For Forecasting - A Literature ReviewIJMERAinda não há avaliações
- Spectral Analysis of The ECG SignalDocumento2 páginasSpectral Analysis of The ECG SignalCamilo BenitezAinda não há avaliações
- Technical Data Sheet: BS-510 All Pressure Solvent CementDocumento1 páginaTechnical Data Sheet: BS-510 All Pressure Solvent CementBuwanah SelvaarajAinda não há avaliações
- MYP Unit Planner - MathDocumento5 páginasMYP Unit Planner - MathMarija CvetkovicAinda não há avaliações
- Unit 9: Cities of The World I. ObjectivesDocumento4 páginasUnit 9: Cities of The World I. ObjectivesTrang Hoang NguyenAinda não há avaliações
- So You Want To Have Your Own Cosmetics BrandDocumento3 páginasSo You Want To Have Your Own Cosmetics BrandCarlosAinda não há avaliações
- Daerah Penyebaran, Populasi Dan Habitat Paku Pohon (Cyathea Spp. Dan Dicksonia SPP.) DI BALI (Distribution, Population and Habitat ofDocumento12 páginasDaerah Penyebaran, Populasi Dan Habitat Paku Pohon (Cyathea Spp. Dan Dicksonia SPP.) DI BALI (Distribution, Population and Habitat ofHyungieAinda não há avaliações