Você também pode gostar
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryNo EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryNota: 3.5 de 5 estrelas3.5/5 (231)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)No EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Nota: 4.5 de 5 estrelas4.5/5 (121)
- Never Split the Difference: Negotiating As If Your Life Depended On ItNo EverandNever Split the Difference: Negotiating As If Your Life Depended On ItNota: 4.5 de 5 estrelas4.5/5 (838)
- The Little Book of Hygge: Danish Secrets to Happy LivingNo EverandThe Little Book of Hygge: Danish Secrets to Happy LivingNota: 3.5 de 5 estrelas3.5/5 (400)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaNo EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaNota: 4.5 de 5 estrelas4.5/5 (266)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeNo EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeNota: 4 de 5 estrelas4/5 (5795)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreNo EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreNota: 4 de 5 estrelas4/5 (1090)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyNo EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyNota: 3.5 de 5 estrelas3.5/5 (2259)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersNo EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersNota: 4.5 de 5 estrelas4.5/5 (345)
- The Emperor of All Maladies: A Biography of CancerNo EverandThe Emperor of All Maladies: A Biography of CancerNota: 4.5 de 5 estrelas4.5/5 (271)
- Team of Rivals: The Political Genius of Abraham LincolnNo EverandTeam of Rivals: The Political Genius of Abraham LincolnNota: 4.5 de 5 estrelas4.5/5 (234)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceNo EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceNota: 4 de 5 estrelas4/5 (895)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureNo EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureNota: 4.5 de 5 estrelas4.5/5 (474)
- The Yellow House: A Memoir (2019 National Book Award Winner)No EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Nota: 4 de 5 estrelas4/5 (98)
- The Unwinding: An Inner History of the New AmericaNo EverandThe Unwinding: An Inner History of the New AmericaNota: 4 de 5 estrelas4/5 (45)
- Ignazio Basile, Pierpaolo Ferrari (Eds.) - Asset Management and Institutional Investors-Springer International Publishing (2016) PDFDocumento469 páginasIgnazio Basile, Pierpaolo Ferrari (Eds.) - Asset Management and Institutional Investors-Springer International Publishing (2016) PDFrhinolovescokeAinda não há avaliações
- Computer Architecture Complexity and Correctness by Silvia M MuellerWolfgang J PDFDocumento568 páginasComputer Architecture Complexity and Correctness by Silvia M MuellerWolfgang J PDFDaryl ScottAinda não há avaliações
- Philosophy of Mind (Jenkins & Sullivan) (2012)Documento199 páginasPhilosophy of Mind (Jenkins & Sullivan) (2012)Claudenicio Ferreira100% (2)
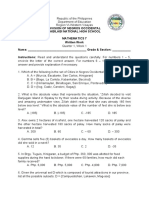
- Grade 7 Quarter 1 Written Work # 1Documento4 páginasGrade 7 Quarter 1 Written Work # 1Junly Jeff Negapatan100% (1)
- Landing Gear Design and DevelopmentDocumento12 páginasLanding Gear Design and DevelopmentC V CHANDRASHEKARAAinda não há avaliações
- Guided Revision: Target: JEE (Main + Advanced) - 2019Documento3 páginasGuided Revision: Target: JEE (Main + Advanced) - 2019Mridul ChhipaAinda não há avaliações
- First Order Differentiate PDFDocumento21 páginasFirst Order Differentiate PDFDharamAinda não há avaliações
- 0607 s10 QP 2Documento12 páginas0607 s10 QP 2Amalia KorakakiAinda não há avaliações
- Attribution ModelsDocumento7 páginasAttribution Modelsjade1986Ainda não há avaliações
- Chapter 11. Griffiths-Radiation-Dipole Radiation PDFDocumento13 páginasChapter 11. Griffiths-Radiation-Dipole Radiation PDFPranveer Singh Parihar100% (1)
- Ojimc 2021 (Imo Mock)Documento8 páginasOjimc 2021 (Imo Mock)NonuAinda não há avaliações
- S4 MathematicsDocumento4 páginasS4 MathematicsDaniel MarkAinda não há avaliações
- HaskellDocumento33 páginasHaskellanon_889114720Ainda não há avaliações
- MIT5 067F09 Lec1 DataDocumento28 páginasMIT5 067F09 Lec1 DataAlexandra BarthAinda não há avaliações
- Experiment # 6: PurposeDocumento5 páginasExperiment # 6: PurposeHamza HussainAinda não há avaliações
- MTH302 Solved MCQs Alotof Solved MCQsof MTH302 InonefDocumento26 páginasMTH302 Solved MCQs Alotof Solved MCQsof MTH302 InonefiftiniaziAinda não há avaliações
- Advanced Digital Image Processing: Course ObjectivesDocumento3 páginasAdvanced Digital Image Processing: Course ObjectivesvineelaAinda não há avaliações
- Wingridds Users GuideDocumento360 páginasWingridds Users GuidedardAinda não há avaliações
- Strategies For Administrative Reform: Yehezkel DrorDocumento17 páginasStrategies For Administrative Reform: Yehezkel DrorNahidul IslamAinda não há avaliações
- Computer Programming Assignment - 3Documento3 páginasComputer Programming Assignment - 3Waqas MehmoodAinda não há avaliações
- Machine Design - Spur GearsDocumento5 páginasMachine Design - Spur GearsKleeanne Nicole UmpadAinda não há avaliações
- LESSON 4 - General Transport EquationsDocumento4 páginasLESSON 4 - General Transport EquationsPamela MendozaAinda não há avaliações
- XRIO User ManualDocumento38 páginasXRIO User ManualicovinyAinda não há avaliações
- St501-Ln1kv 04fs EnglishDocumento12 páginasSt501-Ln1kv 04fs Englishsanthoshs241s0% (1)
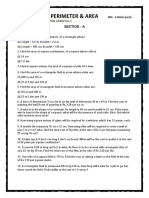
- Perimeter & Area: Section - ADocumento5 páginasPerimeter & Area: Section - AKrishna Agrawal100% (1)
- 5.4 - High Resolution Array LaterologDocumento24 páginas5.4 - High Resolution Array LaterologNilesh SinghalAinda não há avaliações
- Jupyter Notebook ViewerDocumento32 páginasJupyter Notebook ViewerThomas Amleth BottiniAinda não há avaliações
- Lesson Plan Junior High School 7 Grade Social ArithmeticDocumento9 páginasLesson Plan Junior High School 7 Grade Social ArithmeticSafaAgritaAinda não há avaliações
- Crystal Ball Report - FullDocumento7 páginasCrystal Ball Report - FullVan A HoangAinda não há avaliações