Você também pode gostar
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeNo EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeNota: 4 de 5 estrelas4/5 (5794)
- The Yellow House: A Memoir (2019 National Book Award Winner)No EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Nota: 4 de 5 estrelas4/5 (98)
- Developing A Case-Based Retrieval System For Supporting IT CustomersDocumento9 páginasDeveloping A Case-Based Retrieval System For Supporting IT CustomersBilly BryanAinda não há avaliações
- Efficient Adaptive Intra Refresh Error Resilience For 3D Video CommunicationDocumento16 páginasEfficient Adaptive Intra Refresh Error Resilience For 3D Video CommunicationBilly BryanAinda não há avaliações
- Datacentre Total Cost of Ownership (TCO) Models: A SurveyDocumento16 páginasDatacentre Total Cost of Ownership (TCO) Models: A SurveyBilly BryanAinda não há avaliações
- Cost Model For Establishing A Data CenterDocumento20 páginasCost Model For Establishing A Data CenterBilly BryanAinda não há avaliações
- The Influence of Silicon Area On The Performance of The Full AddersDocumento10 páginasThe Influence of Silicon Area On The Performance of The Full AddersBilly BryanAinda não há avaliações
- Scope & Topics: ISSN: 2230 - 9616 (Online) 2231 - 0088 (Print)Documento1 páginaScope & Topics: ISSN: 2230 - 9616 (Online) 2231 - 0088 (Print)Billy BryanAinda não há avaliações
- Application of Dynamic Clustering Algorithm in Medical SurveillanceDocumento5 páginasApplication of Dynamic Clustering Algorithm in Medical SurveillanceBilly BryanAinda não há avaliações
- Computer Science & Engineering: An International Journal (CSEIJ)Documento2 páginasComputer Science & Engineering: An International Journal (CSEIJ)cseijAinda não há avaliações
- Data Partitioning For Ensemble Model BuildingDocumento7 páginasData Partitioning For Ensemble Model BuildingAnonymous roqsSNZAinda não há avaliações
- International Journal of Computer Science, Engineering and Applications (IJCSEA)Documento9 páginasInternational Journal of Computer Science, Engineering and Applications (IJCSEA)Billy BryanAinda não há avaliações
- ISSN: 2230 - 9616 (Online) 2231 - 0088 (Print) Scope & TopicsDocumento1 páginaISSN: 2230 - 9616 (Online) 2231 - 0088 (Print) Scope & TopicsBilly BryanAinda não há avaliações
- ISSN: 2230 - 9616 (Online) 2231 - 0088 (Print) Scope & TopicsDocumento1 páginaISSN: 2230 - 9616 (Online) 2231 - 0088 (Print) Scope & TopicsBilly BryanAinda não há avaliações
- International Journal of Computer Science, Engineering and Applications (IJCSEA)Documento11 páginasInternational Journal of Computer Science, Engineering and Applications (IJCSEA)Billy BryanAinda não há avaliações
- Computer Science & Engineering: An International Journal (CSEIJ)Documento2 páginasComputer Science & Engineering: An International Journal (CSEIJ)cseijAinda não há avaliações
- ISSN: 2230 - 9616 (Online) 2231 - 0088 (Print) Scope & TopicsDocumento1 páginaISSN: 2230 - 9616 (Online) 2231 - 0088 (Print) Scope & TopicsBilly BryanAinda não há avaliações
- Computer Science & Engineering: An International Journal (CSEIJ)Documento2 páginasComputer Science & Engineering: An International Journal (CSEIJ)cseijAinda não há avaliações
- Computer Science & Engineering: An International Journal (CSEIJ)Documento2 páginasComputer Science & Engineering: An International Journal (CSEIJ)cseijAinda não há avaliações
- ISSN: 2230 - 9616 (Online) 2231 - 0088 (Print) Scope & TopicsDocumento1 páginaISSN: 2230 - 9616 (Online) 2231 - 0088 (Print) Scope & TopicsBilly BryanAinda não há avaliações
- International Journal of Advanced Information Technology (IJAIT)Documento1 páginaInternational Journal of Advanced Information Technology (IJAIT)ijaitjournalAinda não há avaliações
- ISSN: 2230 - 9616 (Online) 2231 - 0088 (Print) Scope & TopicsDocumento1 páginaISSN: 2230 - 9616 (Online) 2231 - 0088 (Print) Scope & TopicsBilly BryanAinda não há avaliações
- Hybrid Database System For Big Data Storage and ManagementDocumento13 páginasHybrid Database System For Big Data Storage and ManagementBilly BryanAinda não há avaliações
- International Journal of Advanced Information Technology (IJAIT)Documento1 páginaInternational Journal of Advanced Information Technology (IJAIT)ijaitjournalAinda não há avaliações
- ISSN: 2230 - 9616 (Online) 2231 - 0088 (Print) Scope & TopicsDocumento1 páginaISSN: 2230 - 9616 (Online) 2231 - 0088 (Print) Scope & TopicsBilly BryanAinda não há avaliações
- ISSN: 2230 - 9616 (Online) 2231 - 0088 (Print) Scope & TopicsDocumento1 páginaISSN: 2230 - 9616 (Online) 2231 - 0088 (Print) Scope & TopicsBilly BryanAinda não há avaliações
- International Journal of Computer Science, Engineering and Applications (IJCSEA)Documento2 páginasInternational Journal of Computer Science, Engineering and Applications (IJCSEA)Billy BryanAinda não há avaliações
- ISSN: 2230 - 9616 (Online) 2231 - 0088 (Print) Scope & TopicsDocumento1 páginaISSN: 2230 - 9616 (Online) 2231 - 0088 (Print) Scope & TopicsBilly BryanAinda não há avaliações
- ISSN: 2230 - 9616 (Online) 2231 - 0088 (Print) Scope & TopicsDocumento1 páginaISSN: 2230 - 9616 (Online) 2231 - 0088 (Print) Scope & TopicsBilly BryanAinda não há avaliações
- International Journal of Computer Science, Engineering and Applications (IJCSEA)Documento2 páginasInternational Journal of Computer Science, Engineering and Applications (IJCSEA)Billy BryanAinda não há avaliações
- ISSN: 2230 - 9616 (Online) 2231 - 0088 (Print) Scope & TopicsDocumento1 páginaISSN: 2230 - 9616 (Online) 2231 - 0088 (Print) Scope & TopicsBilly BryanAinda não há avaliações
- International Journal of Computer Science, Engineering and Applications (IJCSEA)Documento2 páginasInternational Journal of Computer Science, Engineering and Applications (IJCSEA)Billy BryanAinda não há avaliações
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryNo EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryNota: 3.5 de 5 estrelas3.5/5 (231)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceNo EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceNota: 4 de 5 estrelas4/5 (895)
- The Little Book of Hygge: Danish Secrets to Happy LivingNo EverandThe Little Book of Hygge: Danish Secrets to Happy LivingNota: 3.5 de 5 estrelas3.5/5 (400)
- Never Split the Difference: Negotiating As If Your Life Depended On ItNo EverandNever Split the Difference: Negotiating As If Your Life Depended On ItNota: 4.5 de 5 estrelas4.5/5 (838)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureNo EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureNota: 4.5 de 5 estrelas4.5/5 (474)
- The Emperor of All Maladies: A Biography of CancerNo EverandThe Emperor of All Maladies: A Biography of CancerNota: 4.5 de 5 estrelas4.5/5 (271)
- Team of Rivals: The Political Genius of Abraham LincolnNo EverandTeam of Rivals: The Political Genius of Abraham LincolnNota: 4.5 de 5 estrelas4.5/5 (234)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaNo EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaNota: 4.5 de 5 estrelas4.5/5 (266)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersNo EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersNota: 4.5 de 5 estrelas4.5/5 (344)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyNo EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyNota: 3.5 de 5 estrelas3.5/5 (2259)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreNo EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreNota: 4 de 5 estrelas4/5 (1090)
- The Unwinding: An Inner History of the New AmericaNo EverandThe Unwinding: An Inner History of the New AmericaNota: 4 de 5 estrelas4/5 (45)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)No EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Nota: 4.5 de 5 estrelas4.5/5 (121)
- Vocabulary: Writing To ExplainDocumento25 páginasVocabulary: Writing To Explain1 2 3Ainda não há avaliações
- Unit 2 Test StatsDocumento2 páginasUnit 2 Test StatsSTEPHANIE LAZENBYAinda não há avaliações
- Salesforce Interview Questions On TriggerDocumento3 páginasSalesforce Interview Questions On TriggerSumit Datta100% (2)
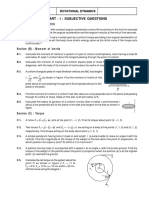
- CPP1 RotationaldynamicsDocumento14 páginasCPP1 RotationaldynamicsBAinda não há avaliações
- HW 1 SolutionsDocumento33 páginasHW 1 SolutionsSilvio SoaresAinda não há avaliações
- Stuff You MUST KNOW COLDDocumento2 páginasStuff You MUST KNOW COLDNikki Nguyen NguyenAinda não há avaliações
- Exercise For StatisticDocumento2 páginasExercise For StatisticCarinaOngAinda não há avaliações
- 13 Cascade ControlDocumento39 páginas13 Cascade ControlMansour AbdulazizAinda não há avaliações
- Data VisualizationDocumento17 páginasData VisualizationShakti RajputAinda não há avaliações
- Numbers and Statistics Guide: 7th EditionDocumento2 páginasNumbers and Statistics Guide: 7th EditionMelaniekleineAinda não há avaliações
- Lesson Plan MathDocumento7 páginasLesson Plan MathSERAD, WILMA LOUISEAinda não há avaliações
- Performance Improvement of A Buck Converter Using Kalman FilterDocumento2 páginasPerformance Improvement of A Buck Converter Using Kalman FilterShadAinda não há avaliações
- Midterm 1 Sample QuestionsDocumento2 páginasMidterm 1 Sample QuestionsAlyssa MAinda não há avaliações
- Kramer DriveDocumento42 páginasKramer DriveSenthil Kumar100% (1)
- There Are No Particles, Just FieldsDocumento14 páginasThere Are No Particles, Just Fieldsriletm86Ainda não há avaliações
- Begginer's Python Cheat Sheet-DataquestDocumento1 páginaBegginer's Python Cheat Sheet-DataquestUspiredes Bornicos100% (1)
- All PastpapersDocumento325 páginasAll PastpapersAhmed Masoud100% (7)
- CS 1996Documento19 páginasCS 1996amrendra7Ainda não há avaliações
- Introduction To The Mathematical Theory of The Conduction of Heat in SolidsDocumento292 páginasIntroduction To The Mathematical Theory of The Conduction of Heat in Solidscall_mmm4199Ainda não há avaliações
- Pile - Point of FixityDocumento10 páginasPile - Point of FixityJahid Jahidul Islam Khan89% (9)
- Summation of Alternating CurrentsDocumento3 páginasSummation of Alternating Currentsalexns84Ainda não há avaliações
- CVP SummaryDocumento10 páginasCVP SummaryCj LopezAinda não há avaliações
- CIV 413 IntroductionDocumento61 páginasCIV 413 IntroductionحمدةالنهديةAinda não há avaliações
- Detailed Lesson PlanDocumento8 páginasDetailed Lesson PlanAmlorepava Mary50% (2)
- Monday Tuesday Wednesday ThursdayDocumento9 páginasMonday Tuesday Wednesday ThursdayMarina AcuñaAinda não há avaliações
- CSE Lecture 2-UWE PDFDocumento4 páginasCSE Lecture 2-UWE PDFSafwan NasirAinda não há avaliações
- 100 Practical Exercises in Music Composition 0190057246 9780190057244 Compress 1Documento50 páginas100 Practical Exercises in Music Composition 0190057246 9780190057244 Compress 1Lê Thanh XuânAinda não há avaliações
- Thailand International Mathematical Olympiad 2015 2015: Primary 4 Past Paper Booklet 試題集Documento17 páginasThailand International Mathematical Olympiad 2015 2015: Primary 4 Past Paper Booklet 試題集Marlyn Cayetano MercadoAinda não há avaliações
- CCDocumento4 páginasCCferdi tayfunAinda não há avaliações
- The Impact of ICT Utilization To Improve The Learning OutcomeDocumento7 páginasThe Impact of ICT Utilization To Improve The Learning OutcomeDona NingrumAinda não há avaliações