Você também pode gostar
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceNo EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceNota: 4 de 5 estrelas4/5 (895)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeNo EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeNota: 4 de 5 estrelas4/5 (5794)
- Teleoperation in BuildingsDocumento7 páginasTeleoperation in BuildingsLaboratory in the WildAinda não há avaliações
- Total Force Fitness II - The DomainsDocumento83 páginasTotal Force Fitness II - The DomainsLaboratory in the WildAinda não há avaliações
- Cavanagh (1980) Ground Reaction Forces in Distance RunningDocumento10 páginasCavanagh (1980) Ground Reaction Forces in Distance RunningLaboratory in the WildAinda não há avaliações
- Handling Qualities For Vehicle DynamicsDocumento180 páginasHandling Qualities For Vehicle DynamicsLaboratory in the WildAinda não há avaliações
- Cooper Harper (1969)Documento56 páginasCooper Harper (1969)Laboratory in the Wild100% (1)
- Elastic Variability in RunningDocumento8 páginasElastic Variability in RunningLaboratory in the WildAinda não há avaliações
- Behavioral Dynamics of InterceptingDocumento17 páginasBehavioral Dynamics of InterceptingLaboratory in the WildAinda não há avaliações
- 1980 Lee Optic Flow FieldDocumento11 páginas1980 Lee Optic Flow FieldLaboratory in the WildAinda não há avaliações
- Affordances For DecelerationDocumento22 páginasAffordances For DecelerationLaboratory in the WildAinda não há avaliações
- Low Back Pain and EnduranceDocumento31 páginasLow Back Pain and EnduranceLaboratory in the Wild100% (2)
- The Yellow House: A Memoir (2019 National Book Award Winner)No EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Nota: 4 de 5 estrelas4/5 (98)
- The Little Book of Hygge: Danish Secrets to Happy LivingNo EverandThe Little Book of Hygge: Danish Secrets to Happy LivingNota: 3.5 de 5 estrelas3.5/5 (400)
- Never Split the Difference: Negotiating As If Your Life Depended On ItNo EverandNever Split the Difference: Negotiating As If Your Life Depended On ItNota: 4.5 de 5 estrelas4.5/5 (838)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureNo EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureNota: 4.5 de 5 estrelas4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryNo EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryNota: 3.5 de 5 estrelas3.5/5 (231)
- The Emperor of All Maladies: A Biography of CancerNo EverandThe Emperor of All Maladies: A Biography of CancerNota: 4.5 de 5 estrelas4.5/5 (271)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaNo EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaNota: 4.5 de 5 estrelas4.5/5 (266)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersNo EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersNota: 4.5 de 5 estrelas4.5/5 (345)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyNo EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyNota: 3.5 de 5 estrelas3.5/5 (2259)
- Team of Rivals: The Political Genius of Abraham LincolnNo EverandTeam of Rivals: The Political Genius of Abraham LincolnNota: 4.5 de 5 estrelas4.5/5 (234)
- The Unwinding: An Inner History of the New AmericaNo EverandThe Unwinding: An Inner History of the New AmericaNota: 4 de 5 estrelas4/5 (45)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreNo EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreNota: 4 de 5 estrelas4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)No EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Nota: 4.5 de 5 estrelas4.5/5 (121)
- Engine Maintenance PartsDocumento13 páginasEngine Maintenance PartsSerkanAl100% (1)
- Circuiting Explained-Water Coils PDFDocumento2 páginasCircuiting Explained-Water Coils PDFFrancisAinda não há avaliações
- WEISER Locks and HardwareDocumento24 páginasWEISER Locks and HardwareMaritime Door & WindowAinda não há avaliações
- 25252525Documento38 páginas25252525Ivan GonzalezAinda não há avaliações
- BurnerDocumento4 páginasBurnerAhmed Mohamed KhalilAinda não há avaliações
- 2013 11 DUPLEX EasyDocumento21 páginas2013 11 DUPLEX EasyAnonymous HC0tWeAinda não há avaliações
- 4 Rec. ITU-R BS.775-3: Reference Loudspeaker Arrangement With Loudspeakers L/C/R and LS/RSDocumento3 páginas4 Rec. ITU-R BS.775-3: Reference Loudspeaker Arrangement With Loudspeakers L/C/R and LS/RSPaulo PiresAinda não há avaliações
- Problems PDFDocumento9 páginasProblems PDFEduarGelvezAinda não há avaliações
- Methods of Tube Expansion in Tube To TubDocumento19 páginasMethods of Tube Expansion in Tube To Tubkurcek100% (1)
- 2 Coagulation FlocculationDocumento26 páginas2 Coagulation FlocculationNurSyuhada AAinda não há avaliações
- 20 Site SummaryDocumento2 páginas20 Site SummaryMuzammil WepukuluAinda não há avaliações
- Elevator Traffic Analysis - Passanger Elevators Option-1Documento5 páginasElevator Traffic Analysis - Passanger Elevators Option-1Amit GuptaAinda não há avaliações
- Siemens Engineering Manual V7Documento338 páginasSiemens Engineering Manual V7Jeremy Branch100% (2)
- Le22a1321 AocDocumento130 páginasLe22a1321 AocEchefisEchefisAinda não há avaliações
- VXN150 Vixion Fuel Tank PDFDocumento3 páginasVXN150 Vixion Fuel Tank PDFHarris Jum'aniandaAinda não há avaliações
- ITP InstrumentationDocumento9 páginasITP InstrumentationzhangyiliAinda não há avaliações
- Comparative Tracking Index of Electrical Insulating MaterialsDocumento6 páginasComparative Tracking Index of Electrical Insulating MaterialsAbu Anas M.SalaheldinAinda não há avaliações
- Feasibility Study of Solar Photovoltaic (PV) Energy Systems For Rural Villages of Ethiopian Somali Region (A Case Study of Jigjiga Zone)Documento7 páginasFeasibility Study of Solar Photovoltaic (PV) Energy Systems For Rural Villages of Ethiopian Somali Region (A Case Study of Jigjiga Zone)ollata kalanoAinda não há avaliações
- AB-522 Standard Pneumatic Test Procedure RequirementsDocumento16 páginasAB-522 Standard Pneumatic Test Procedure RequirementsShank HackerAinda não há avaliações
- Understanding Low Voltage Power Distribution SystemsDocumento64 páginasUnderstanding Low Voltage Power Distribution SystemsJorge Luis Mallqui Barbaran100% (1)
- EN 1991-1-4 NA enDocumento4 páginasEN 1991-1-4 NA enanuj3936100% (1)
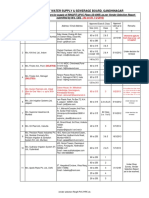
- GWSSB Vendor List 19.11.2013Documento18 páginasGWSSB Vendor List 19.11.2013sivesh_rathiAinda não há avaliações
- Comfort and Performance Your Customers DemandDocumento18 páginasComfort and Performance Your Customers Demandgizex2013Ainda não há avaliações
- Delhi Public School Bangalore North ACADEMIC SESSION 2021-2022 Ut2 Revision Work Sheet TOPIC: Sorting Materials Into Group Answer KeyDocumento6 páginasDelhi Public School Bangalore North ACADEMIC SESSION 2021-2022 Ut2 Revision Work Sheet TOPIC: Sorting Materials Into Group Answer KeySumukh MullangiAinda não há avaliações
- Alien Vault Lab2Documento28 páginasAlien Vault Lab2DukeAinda não há avaliações
- How Is Electrical Energy MeasuredDocumento4 páginasHow Is Electrical Energy MeasuredSonya ReddyAinda não há avaliações
- SdccmanDocumento126 páginasSdccmanGustavo A. Sarache MillanAinda não há avaliações
- Educational Solutions From Schneider ElectricDocumento164 páginasEducational Solutions From Schneider ElectricfaneeeeeeAinda não há avaliações
- Mechanical Workshop Practice ReportDocumento6 páginasMechanical Workshop Practice ReportMuhd AkmalAinda não há avaliações
- Stay CablesDocumento22 páginasStay Cablesalex_g00dyAinda não há avaliações