Você também pode gostar
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeNo EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeNota: 4 de 5 estrelas4/5 (5794)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreNo EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreNota: 4 de 5 estrelas4/5 (1090)
- Never Split the Difference: Negotiating As If Your Life Depended On ItNo EverandNever Split the Difference: Negotiating As If Your Life Depended On ItNota: 4.5 de 5 estrelas4.5/5 (838)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceNo EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceNota: 4 de 5 estrelas4/5 (895)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersNo EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersNota: 4.5 de 5 estrelas4.5/5 (345)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureNo EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureNota: 4.5 de 5 estrelas4.5/5 (474)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)No EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Nota: 4.5 de 5 estrelas4.5/5 (121)
- The Emperor of All Maladies: A Biography of CancerNo EverandThe Emperor of All Maladies: A Biography of CancerNota: 4.5 de 5 estrelas4.5/5 (271)
- The Little Book of Hygge: Danish Secrets to Happy LivingNo EverandThe Little Book of Hygge: Danish Secrets to Happy LivingNota: 3.5 de 5 estrelas3.5/5 (400)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyNo EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyNota: 3.5 de 5 estrelas3.5/5 (2259)
- The Yellow House: A Memoir (2019 National Book Award Winner)No EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Nota: 4 de 5 estrelas4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaNo EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaNota: 4.5 de 5 estrelas4.5/5 (266)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryNo EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryNota: 3.5 de 5 estrelas3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnNo EverandTeam of Rivals: The Political Genius of Abraham LincolnNota: 4.5 de 5 estrelas4.5/5 (234)
- The Unwinding: An Inner History of the New AmericaNo EverandThe Unwinding: An Inner History of the New AmericaNota: 4 de 5 estrelas4/5 (45)
- Cooper Harper (1969)Documento56 páginasCooper Harper (1969)Laboratory in the Wild100% (1)
- The Floreio ProjectDocumento15 páginasThe Floreio ProjectMauroZdrilićAinda não há avaliações
- Fundamental Body Movements Are The Building Blocks Necessary For Physical Activities Like Sports and DanceDocumento2 páginasFundamental Body Movements Are The Building Blocks Necessary For Physical Activities Like Sports and Dancerichmond ponsicaAinda não há avaliações
- Fundamental Dance PositionDocumento6 páginasFundamental Dance PositionPhrexilyn Pajarillo100% (1)
- Teleoperation in BuildingsDocumento7 páginasTeleoperation in BuildingsLaboratory in the WildAinda não há avaliações
- Handling Qualities For Vehicle DynamicsDocumento180 páginasHandling Qualities For Vehicle DynamicsLaboratory in the WildAinda não há avaliações
- Silverman (2012) Incline and Decline WalkingDocumento7 páginasSilverman (2012) Incline and Decline WalkingLaboratory in the WildAinda não há avaliações
- Franz and Kram (2011) Grade and Muscle ActivationDocumento5 páginasFranz and Kram (2011) Grade and Muscle ActivationLaboratory in the WildAinda não há avaliações
- Neural Basis of Navigation in Urban TerrainDocumento4 páginasNeural Basis of Navigation in Urban TerrainLaboratory in the WildAinda não há avaliações
- Minetti Et Al. (1993) Optimal GradientDocumento12 páginasMinetti Et Al. (1993) Optimal GradientLaboratory in the WildAinda não há avaliações
- Cavanagh (1980) Ground Reaction Forces in Distance RunningDocumento10 páginasCavanagh (1980) Ground Reaction Forces in Distance RunningLaboratory in the WildAinda não há avaliações
- Total Force Fitness II - The DomainsDocumento83 páginasTotal Force Fitness II - The DomainsLaboratory in the WildAinda não há avaliações
- Movement Models From SportsDocumento23 páginasMovement Models From SportsLaboratory in the WildAinda não há avaliações
- Football TacklingDocumento8 páginasFootball TacklingLaboratory in the WildAinda não há avaliações
- Coordination of Upper Torso and ArmsDocumento13 páginasCoordination of Upper Torso and ArmsLaboratory in the WildAinda não há avaliações
- Interpersonal Dynamics in SportDocumento9 páginasInterpersonal Dynamics in SportLaboratory in the WildAinda não há avaliações
- Target and Disturbances in Flight SimulationDocumento92 páginasTarget and Disturbances in Flight SimulationLaboratory in the WildAinda não há avaliações
- Optimal Control Model of Human OperatorDocumento15 páginasOptimal Control Model of Human OperatorLaboratory in the WildAinda não há avaliações
- Dynamic Visual Acuity Over Head MovementsDocumento13 páginasDynamic Visual Acuity Over Head MovementsLaboratory in the WildAinda não há avaliações
- Behavioral Dynamics of InterceptingDocumento17 páginasBehavioral Dynamics of InterceptingLaboratory in the WildAinda não há avaliações
- Internal and External WorkDocumento15 páginasInternal and External WorkLaboratory in the WildAinda não há avaliações
- Intermodal Regulation of HeadingDocumento3 páginasIntermodal Regulation of HeadingLaboratory in the WildAinda não há avaliações
- High Speed Running and Eccentric LoadingDocumento17 páginasHigh Speed Running and Eccentric LoadingLaboratory in the WildAinda não há avaliações
- Elastic Variability in RunningDocumento8 páginasElastic Variability in RunningLaboratory in the WildAinda não há avaliações
- Coordination Variability Around The Walk To Run Transition During Human LocomotionDocumento19 páginasCoordination Variability Around The Walk To Run Transition During Human LocomotionLaboratory in the WildAinda não há avaliações
- Running Compliance Over Rough TerrainDocumento5 páginasRunning Compliance Over Rough TerrainLaboratory in the WildAinda não há avaliações
- Running and Hopping Over Rough TerrainDocumento8 páginasRunning and Hopping Over Rough TerrainLaboratory in the WildAinda não há avaliações
- Dynamic Visual Acuity During Treadmill LocomotionDocumento9 páginasDynamic Visual Acuity During Treadmill LocomotionLaboratory in the WildAinda não há avaliações
- Vestibular Dysfunction and Dynamic Visual Acuity During Treadmill LocomotionDocumento9 páginasVestibular Dysfunction and Dynamic Visual Acuity During Treadmill LocomotionLaboratory in the WildAinda não há avaliações
- Elastic Transition Walk-RunDocumento8 páginasElastic Transition Walk-RunLaboratory in the WildAinda não há avaliações
- Affordances For DecelerationDocumento22 páginasAffordances For DecelerationLaboratory in the WildAinda não há avaliações
- 1980 Lee Optic Flow FieldDocumento11 páginas1980 Lee Optic Flow FieldLaboratory in the WildAinda não há avaliações
- Free Download Animal Locomotion C Oabs T Oxford Animal Biology 2Nd Edition Andrew Biewener Full Chapter PDFDocumento51 páginasFree Download Animal Locomotion C Oabs T Oxford Animal Biology 2Nd Edition Andrew Biewener Full Chapter PDFrobert.holbrook711100% (19)
- MAPE For Grade 2Documento44 páginasMAPE For Grade 2sheryl_morales67% (3)
- CrawlingWalking Adolf2014Documento6 páginasCrawlingWalking Adolf2014zwslpoAinda não há avaliações
- BPE 105 - Movement Education - Final ExamDocumento5 páginasBPE 105 - Movement Education - Final ExamJoseph Bernard Marcelo100% (2)
- Correct Mark 1.00 Out of 1.00: LocomotorDocumento7 páginasCorrect Mark 1.00 Out of 1.00: Locomotorspinel sunAinda não há avaliações
- Liao 2007 A Review of Fish Swimming Mechanics and Behaviour in Altered FlowsDocumento21 páginasLiao 2007 A Review of Fish Swimming Mechanics and Behaviour in Altered FlowsMarcos Paulo SoaresAinda não há avaliações
- Metamorphica ClassicDocumento156 páginasMetamorphica ClassicbobAinda não há avaliações
- Pe7 Q4 Mod4Documento23 páginasPe7 Q4 Mod4Jocel TurlaAinda não há avaliações
- SnakesDocumento63 páginasSnakesvipinAinda não há avaliações
- A Survey of Bio-Inspired Compliant Legged Robot Designs: Home Search Collections Journals About Contact Us My IopscienceDocumento21 páginasA Survey of Bio-Inspired Compliant Legged Robot Designs: Home Search Collections Journals About Contact Us My IopscienceRovi Andra PradivaAinda não há avaliações
- The Locomotor and Non 2.2Documento1 páginaThe Locomotor and Non 2.2ROBERT JOHN PATAGAinda não há avaliações
- Logo - Chapter 5Documento2 páginasLogo - Chapter 5violet vinsmokeAinda não há avaliações
- A SEMI in PHYSICAL EDUCATION 3 FINALEDocumento4 páginasA SEMI in PHYSICAL EDUCATION 3 FINALEMylene EsicAinda não há avaliações
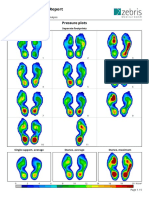
- Zebris Treadmill Gait Report: Pressure PlotsDocumento5 páginasZebris Treadmill Gait Report: Pressure PlotsAwatef FituriAinda não há avaliações
- Cl-Physical Education 1Documento5 páginasCl-Physical Education 1justine alinaAinda não há avaliações
- Ch-8 Body Movements - Day1Documento12 páginasCh-8 Body Movements - Day1dr satnam kaurAinda não há avaliações
- The MIT Super Mini Cheetah - A Small, Low-Cost Quadrupedal Robot For Dynamic LocomotionDocumento8 páginasThe MIT Super Mini Cheetah - A Small, Low-Cost Quadrupedal Robot For Dynamic LocomotionCuenta De RespaldoAinda não há avaliações
- DocumentDocumento4 páginasDocumentSebastian Vincent Pulga PedrosaAinda não há avaliações
- ASSIGNMENTDocumento6 páginasASSIGNMENTRùpám KanungoAinda não há avaliações
- Gymnastics: Group 4Documento32 páginasGymnastics: Group 4Lavinia Euziah Arce BuenoAinda não há avaliações
- Animschool Introduction To 3d AnimationDocumento7 páginasAnimschool Introduction To 3d AnimationStephenOnahAinda não há avaliações
- Loco and Non-LocoDocumento5 páginasLoco and Non-Locoteforas11Ainda não há avaliações
- Hummingbird PDE1Documento3 páginasHummingbird PDE1Galia DeitzAinda não há avaliações
- Movement of Animals 1Documento28 páginasMovement of Animals 1sandeepscribdAinda não há avaliações
- Third Quarterly Exam in MAPEH 1Documento4 páginasThird Quarterly Exam in MAPEH 1Ma Regine Rose DinerosAinda não há avaliações
- Pe Lesson PlanDocumento10 páginasPe Lesson Planapi-550268732Ainda não há avaliações
- Gait CycleDocumento30 páginasGait Cyclefredrickshein73Ainda não há avaliações