Você também pode gostar
- Air Powered BikeDocumento10 páginasAir Powered Bikegautam_lele_1Ainda não há avaliações
- Air CarDocumento4 páginasAir CarRanjeet SinghAinda não há avaliações
- Drivers of Green ManufacturingDocumento18 páginasDrivers of Green Manufacturinggautam_lele_1Ainda não há avaliações
- Pressure VesselDocumento3 páginasPressure Vesselgautam_lele_1Ainda não há avaliações
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeNo EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeNota: 4 de 5 estrelas4/5 (5782)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceNo EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceNota: 4 de 5 estrelas4/5 (890)
- The Yellow House: A Memoir (2019 National Book Award Winner)No EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Nota: 4 de 5 estrelas4/5 (98)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureNo EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureNota: 4.5 de 5 estrelas4.5/5 (474)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaNo EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaNota: 4.5 de 5 estrelas4.5/5 (265)
- The Little Book of Hygge: Danish Secrets to Happy LivingNo EverandThe Little Book of Hygge: Danish Secrets to Happy LivingNota: 3.5 de 5 estrelas3.5/5 (399)
- Never Split the Difference: Negotiating As If Your Life Depended On ItNo EverandNever Split the Difference: Negotiating As If Your Life Depended On ItNota: 4.5 de 5 estrelas4.5/5 (838)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryNo EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryNota: 3.5 de 5 estrelas3.5/5 (231)
- The Emperor of All Maladies: A Biography of CancerNo EverandThe Emperor of All Maladies: A Biography of CancerNota: 4.5 de 5 estrelas4.5/5 (271)
- Team of Rivals: The Political Genius of Abraham LincolnNo EverandTeam of Rivals: The Political Genius of Abraham LincolnNota: 4.5 de 5 estrelas4.5/5 (234)
- The Unwinding: An Inner History of the New AmericaNo EverandThe Unwinding: An Inner History of the New AmericaNota: 4 de 5 estrelas4/5 (45)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersNo EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersNota: 4.5 de 5 estrelas4.5/5 (344)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyNo EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyNota: 3.5 de 5 estrelas3.5/5 (2219)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreNo EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreNota: 4 de 5 estrelas4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)No EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Nota: 4.5 de 5 estrelas4.5/5 (119)
- MZ Es 125 and Es 150 Repair Manual 1966 English 100Documento80 páginasMZ Es 125 and Es 150 Repair Manual 1966 English 100USUARIO1218Ainda não há avaliações
- Stay Cable Specifications SummaryDocumento21 páginasStay Cable Specifications SummaryManukantShrotriyaAinda não há avaliações
- Hydraulic ABS Specification: I. Product ProfileDocumento12 páginasHydraulic ABS Specification: I. Product ProfileMarlon MartinezAinda não há avaliações
- Rushikesh PoteDocumento12 páginasRushikesh Poterushikesh poteAinda não há avaliações
- Mechanic Diesel CITS1.1 NSQF-6Documento39 páginasMechanic Diesel CITS1.1 NSQF-6UNIVERSHAL GEMAinda não há avaliações
- Bollhoff Amtec Threaded Inserts For PlasticsDocumento34 páginasBollhoff Amtec Threaded Inserts For PlasticsAce Industrial SuppliesAinda não há avaliações
- Honda V45 V65 Sabre & Magna (VF700, VF750, VF1100 V-Fours) Shop ManualDocumento183 páginasHonda V45 V65 Sabre & Magna (VF700, VF750, VF1100 V-Fours) Shop ManualReinier71% (7)
- Relacion de Normas DVS PDFDocumento8 páginasRelacion de Normas DVS PDFNeto Paucar ChancaAinda não há avaliações
- BoilerDocumento14 páginasBoilerSK MD WALI ULLAH BULONAinda não há avaliações
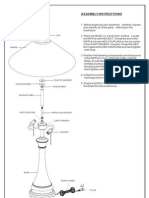
- Assembly Instructions: FinialDocumento1 páginaAssembly Instructions: Finialdayshift5Ainda não há avaliações
- Swimming Pool IsolationDocumento9 páginasSwimming Pool IsolationAshwin B S RaoAinda não há avaliações
- Introduction To Stability and Determinacy: Main Reference: Structural Analysis (R.C. Hibbeler)Documento62 páginasIntroduction To Stability and Determinacy: Main Reference: Structural Analysis (R.C. Hibbeler)Study ChillAinda não há avaliações
- Conditions of Supply and Steel Grades for Sheet PilingDocumento1 páginaConditions of Supply and Steel Grades for Sheet PilingHushes CheongAinda não há avaliações
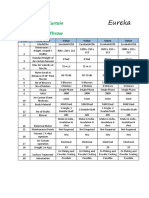
- Eureka Air Curtains CatalogueDocumento3 páginasEureka Air Curtains CatalogueSumit BhandariAinda não há avaliações
- Engine Room Simulator ERS 5000: Vessel Model "Tanker LCC" (VERSION 7.2.1100) Trainee ManualDocumento292 páginasEngine Room Simulator ERS 5000: Vessel Model "Tanker LCC" (VERSION 7.2.1100) Trainee Manualalex_alexutzuu100% (1)
- Solution To Aerody Mock Exam 2014 (HolyDocumento23 páginasSolution To Aerody Mock Exam 2014 (HolyReem RodriguezAinda não há avaliações
- Cameron ValvesDocumento35 páginasCameron ValvesTagno Miguel MacedoAinda não há avaliações
- Workshop 4: Burning Velocity Model For Partially-Premixed CombustionDocumento30 páginasWorkshop 4: Burning Velocity Model For Partially-Premixed CombustionIjaz FazilAinda não há avaliações
- 485 Repair Parts IndexDocumento16 páginas485 Repair Parts IndexMohammad Zainullah KhanAinda não há avaliações
- What Is A Lathe Machine? Its Parts, Operations, Types With PDFDocumento6 páginasWhat Is A Lathe Machine? Its Parts, Operations, Types With PDFMunem ShahriarAinda não há avaliações
- DB 460Documento252 páginasDB 460mehdi100% (2)
- Wankel EngineDocumento8 páginasWankel Engineuma.nitw8088Ainda não há avaliações
- Dynamics of Rigid Bodies CE 002 (TIP Reviewer)Documento7 páginasDynamics of Rigid Bodies CE 002 (TIP Reviewer)James LindoAinda não há avaliações
- NFPA 87 RP For Fluid Heaters (Presentation) PDFDocumento56 páginasNFPA 87 RP For Fluid Heaters (Presentation) PDFtxagus100% (2)
- Calcul LantDocumento2 páginasCalcul LantDiana Maria CozmaAinda não há avaliações
- Parts Manual E45 Compact Excavator: S/N AG3G11001 & Above S/N AHHC11001 & AboveDocumento459 páginasParts Manual E45 Compact Excavator: S/N AG3G11001 & Above S/N AHHC11001 & AboveZawminhtun100% (2)
- Steam Cycles PDFDocumento18 páginasSteam Cycles PDFAmda AmdaAinda não há avaliações
- Design Criteria: Seismic Design For Buckling-Restrained Braced Frames Based On AISC 360-05 & AISC 341-05Documento5 páginasDesign Criteria: Seismic Design For Buckling-Restrained Braced Frames Based On AISC 360-05 & AISC 341-05Rahil QureshiAinda não há avaliações
- Harmonic Analysis ExampleDocumento32 páginasHarmonic Analysis ExampleWendi JunaediAinda não há avaliações
- Corporate Brochure 2011Documento30 páginasCorporate Brochure 2011FARIDAinda não há avaliações