Você também pode gostar
- 009 - Hellinger, Bert - Pensamientos de Realización (PDF) PDFDocumento174 páginas009 - Hellinger, Bert - Pensamientos de Realización (PDF) PDFLucia Paola100% (4)
- Kuka KR6 R900Documento41 páginasKuka KR6 R900LUIS ALBERTO AYRA ROMERO100% (1)
- Implementacion de Un Alimentador ElectroneumaticoDocumento79 páginasImplementacion de Un Alimentador ElectroneumaticoAn HFAinda não há avaliações
- Manual PaletizadoDocumento28 páginasManual PaletizadoJCarmen VarelaAinda não há avaliações
- Ejercicios de Dinámica Del Cuerpo Rigido Uam-A CDMXDocumento20 páginasEjercicios de Dinámica Del Cuerpo Rigido Uam-A CDMXAngel Orlando Noguez Gonzalez0% (1)
- Informe Practica de RoboticaDocumento7 páginasInforme Practica de Roboticazintia mezaAinda não há avaliações
- Ejemplo Manual de InstalaciónDocumento24 páginasEjemplo Manual de InstalaciónAbelardo Willibaldo Ramírez GarcíaAinda não há avaliações
- Practica Robótica Entradas y Salidas Robot KukaDocumento25 páginasPractica Robótica Entradas y Salidas Robot KukaHólguerMauropazAinda não há avaliações
- Robot 3Documento42 páginasRobot 3bryan nonaAinda não há avaliações
- Programación básica MotomanDocumento5 páginasProgramación básica MotomanPablo Flowers100% (1)
- Manual de Usuario KukaDocumento13 páginasManual de Usuario KukascribdotreblackAinda não há avaliações
- Robot MotomanDocumento27 páginasRobot MotomanCaesar AlexanderAinda não há avaliações
- RobotStudio: simulador de robots industrialesDocumento6 páginasRobotStudio: simulador de robots industrialesAdriana MartzAinda não há avaliações
- FST 4 Conexion TCP-IPDocumento18 páginasFST 4 Conexion TCP-IPAntonio OviedoAinda não há avaliações
- Movimientos circulares robot industrialDocumento10 páginasMovimientos circulares robot industrialAlexiz CuAinda não há avaliações
- Epson T-Series Robot Manual Spanish (r9)Documento279 páginasEpson T-Series Robot Manual Spanish (r9)Laboratorios MecatrónicaAinda não há avaliações
- Nao Robots Informe XDDocumento4 páginasNao Robots Informe XDEmilio Paredes SolisAinda não há avaliações
- Calibracion de Fuerza ABBDocumento3 páginasCalibracion de Fuerza ABBJuan MoralesAinda não há avaliações
- Practica Abb 140Documento5 páginasPractica Abb 140Sara Ruiz TajueloAinda não há avaliações
- Curso Robots Fanuc R30ib Nivel IIDocumento55 páginasCurso Robots Fanuc R30ib Nivel IIJoanFraCanoAinda não há avaliações
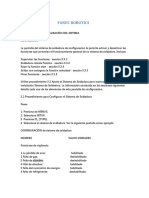
- Configuracion Del Sistema Fanuc Robotics PDFDocumento4 páginasConfiguracion Del Sistema Fanuc Robotics PDFVik TulaAinda não há avaliações
- RSLogix 500 lenguaje programación PLCDocumento2 páginasRSLogix 500 lenguaje programación PLCKaren BLAinda não há avaliações
- Programación Con DelmiaDocumento131 páginasProgramación Con DelmiaMARIANOAinda não há avaliações
- ComHMI-VFD MODBUSDocumento24 páginasComHMI-VFD MODBUSRacer RacerAinda não há avaliações
- Guia Rapida ABB 6400Documento8 páginasGuia Rapida ABB 6400Eliseo RiveraAinda não há avaliações
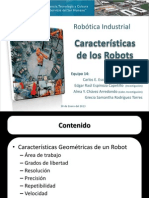
- Caracteristicas Robot PUMA - SCARADocumento12 páginasCaracteristicas Robot PUMA - SCARASusy Chancusi ToapantaAinda não há avaliações
- Informe Reinoso - GuascalDocumento26 páginasInforme Reinoso - GuascalDestapador SalesianoAinda não há avaliações
- 96-ES8913A Bar PullerDocumento54 páginas96-ES8913A Bar Pullercesar_abddAinda não há avaliações
- 9 Matto PreventivoDocumento116 páginas9 Matto Preventivoedgar olveraAinda não há avaliações
- OPERADORES FinalDocumento219 páginasOPERADORES FinalVik TulaAinda não há avaliações
- Manual Pro Engineer WildfireDocumento136 páginasManual Pro Engineer Wildfiredr_dwinAinda não há avaliações
- Manufactura Flexible 3.5 y 3.6Documento14 páginasManufactura Flexible 3.5 y 3.6Cesar OmarAinda não há avaliações
- Generador y UPS para la Dirección TICS de la UTMDocumento5 páginasGenerador y UPS para la Dirección TICS de la UTMFausto HerediaAinda não há avaliações
- Bases de Datos Activas IIDocumento23 páginasBases de Datos Activas IIDaniel FrcAinda não há avaliações
- Unidad 3Documento11 páginasUnidad 3David CepedaAinda não há avaliações
- Motores paso a paso unipolares y bipolaresDocumento10 páginasMotores paso a paso unipolares y bipolaresAlex Moreano AAinda não há avaliações
- Manual Geeetech Prusa I3 proDocumento49 páginasManual Geeetech Prusa I3 proEugge Ferreyra100% (1)
- Prácticas Neumática Básica JUAN567Documento23 páginasPrácticas Neumática Básica JUAN567Jesus Antonio Ledezma OrtizAinda não há avaliações
- Controladores Lógicos Programables PLCS: Msc. July Andrea Gómez CamperosDocumento43 páginasControladores Lógicos Programables PLCS: Msc. July Andrea Gómez Camperosluis chaustreAinda não há avaliações
- Reporte de SimulaciónDocumento11 páginasReporte de SimulaciónIngGuillermoVenturaAinda não há avaliações
- Control K910 Con ArduinoDocumento10 páginasControl K910 Con ArduinoSamuel GarnicaAinda não há avaliações
- 6 Opciones de ConfiguracionDocumento172 páginas6 Opciones de Configuracionedgar olveraAinda não há avaliações
- LPAIC2010Documento189 páginasLPAIC2010Oskar RockdriguezAinda não há avaliações
- Programacion de Un Robot ManipuladorDocumento64 páginasProgramacion de Un Robot Manipuladorlor986Ainda não há avaliações
- Datos Tecnicos de Brazos RoboticosDocumento9 páginasDatos Tecnicos de Brazos RoboticosAndrés MoralesAinda não há avaliações
- Tutoria - Instalacion Kuka SimproDocumento8 páginasTutoria - Instalacion Kuka SimproAndres MartinezAinda não há avaliações
- Introducción al TIA PORTAL y configuración de pantallas HMIDocumento25 páginasIntroducción al TIA PORTAL y configuración de pantallas HMIAnonymous Tr7Gt0Ainda não há avaliações
- Um1209401 Es PDFDocumento0 páginaUm1209401 Es PDFCarreño GutiérrezAinda não há avaliações
- Conversion de Tipos de Datos PLCDocumento5 páginasConversion de Tipos de Datos PLCamiguitoAinda não há avaliações
- Capitulo 9Documento27 páginasCapitulo 9zakty_182Ainda não há avaliações
- Preguntas KUKADocumento6 páginasPreguntas KUKAsantyAinda não há avaliações
- Practica 1 Lab Ad2022Documento5 páginasPractica 1 Lab Ad2022Pedro MartinezAinda não há avaliações
- Descripcion KCP (KUKA CONTROL PANEL)Documento11 páginasDescripcion KCP (KUKA CONTROL PANEL)Alex Moreano AAinda não há avaliações
- Guia 6Documento24 páginasGuia 6bookskskAinda não há avaliações
- Robotica Industrial 2 2014Documento49 páginasRobotica Industrial 2 2014Braulio ValdesAinda não há avaliações
- Sistema de Control para Robots IndustrialesDocumento93 páginasSistema de Control para Robots IndustrialesJose EkAinda não há avaliações
- Robot KukaDocumento4 páginasRobot KukaVeronica Andrade GarciaAinda não há avaliações
- Kinetix 6000 Codigos de ErrorDocumento5 páginasKinetix 6000 Codigos de ErrorVictorAinda não há avaliações
- Guía de Primeros Pasos Con CMMT-As-PN - Rev3Documento20 páginasGuía de Primeros Pasos Con CMMT-As-PN - Rev3Tomas GVAinda não há avaliações
- Fsu DX200Documento158 páginasFsu DX200emmanuel baezAinda não há avaliações
- Khepera III robot estudio guíaDocumento19 páginasKhepera III robot estudio guíaOscar Gómez HernándezAinda não há avaliações
- Guia Robot Misubishi PDFDocumento7 páginasGuia Robot Misubishi PDFrimce77Ainda não há avaliações
- Caracteristicas Robot-2c Controlador y Teach Box PDFDocumento8 páginasCaracteristicas Robot-2c Controlador y Teach Box PDFJohn VH100% (1)
- Practica 14Documento5 páginasPractica 14Carlos Eduardo Escobar CoreñoAinda não há avaliações
- Op.'s With Teaching BoxDocumento11 páginasOp.'s With Teaching BoxCarlos Eduardo Escobar CoreñoAinda não há avaliações
- Practica 12Documento12 páginasPractica 12Carlos Eduardo Escobar CoreñoAinda não há avaliações
- Unidad IDocumento35 páginasUnidad ICarlos Eduardo Escobar CoreñoAinda não há avaliações
- Tecnologia de Grupos Fabricacion CelularDocumento11 páginasTecnologia de Grupos Fabricacion CelularDavis Ramos VelasquezAinda não há avaliações
- Memòria PFCDocumento67 páginasMemòria PFCCarlos Eduardo Escobar CoreñoAinda não há avaliações
- Presentacion Terminada 2Documento47 páginasPresentacion Terminada 2Carlos Eduardo Escobar CoreñoAinda não há avaliações
- Presentacion TerminadaDocumento46 páginasPresentacion TerminadaCarlos Eduardo Escobar CoreñoAinda não há avaliações
- Etica en La IngenieriaDocumento7 páginasEtica en La IngenieriaFernando SánchezAinda não há avaliações
- TrayectoriasDocumento25 páginasTrayectoriasSandraaMGuzmanAinda não há avaliações
- El VidrioDocumento23 páginasEl VidrioCarlos Eduardo Escobar CoreñoAinda não há avaliações
- Robotic ADocumento35 páginasRobotic ACarlos Eduardo Escobar CoreñoAinda não há avaliações
- ProblemaDocumento11 páginasProblemaCarlos Eduardo Escobar CoreñoAinda não há avaliações
- Cristal LiquidoDocumento17 páginasCristal LiquidoCarlos Eduardo Escobar CoreñoAinda não há avaliações
- Experiment OsDocumento20 páginasExperiment OsDumas DumasAinda não há avaliações
- Mikkyo - Doc 2Documento16 páginasMikkyo - Doc 2Héctor Gerson Oliva UlloaAinda não há avaliações
- Física II: Cuerdas y tubos sonorosDocumento2 páginasFísica II: Cuerdas y tubos sonorosEmanuel Sanguino Rivera0% (2)
- Vibraciones Mecanicas DinamicaDocumento106 páginasVibraciones Mecanicas DinamicaFRANK YORJAN FLORES OCAÑAAinda não há avaliações
- Polarización y FotoelasticidadDocumento12 páginasPolarización y FotoelasticidadFranco Herbert Espinoza ArroyoAinda não há avaliações
- Prac Prob - Medici - Human - Biomecánica - Leyes de Newton - Equilibrio de Cuerpos Rígidos - Energía 2023-IDocumento4 páginasPrac Prob - Medici - Human - Biomecánica - Leyes de Newton - Equilibrio de Cuerpos Rígidos - Energía 2023-IFranz Torres100% (1)
- Trabajo y PotenciaDocumento9 páginasTrabajo y PotenciaEdwin AmadorAinda não há avaliações
- Fisica Pau Cyl 2007 2016 Mas Ondas - OrdenadoDocumento7 páginasFisica Pau Cyl 2007 2016 Mas Ondas - OrdenadoLuis Alfredo Fernandez SolizAinda não há avaliações
- Fundamentos acústicaDocumento51 páginasFundamentos acústicaAlba MontecinosAinda não há avaliações
- Eutonía Apuntes PDFDocumento13 páginasEutonía Apuntes PDFmacu100% (2)
- Clase 03 - Preguntas Introducción A La DinámicaDocumento8 páginasClase 03 - Preguntas Introducción A La DinámicaHenrry RojasAinda não há avaliações
- CTN 25 PDFDocumento181 páginasCTN 25 PDFDylan ImbaAinda não há avaliações
- 4 Ley de NewtonDocumento9 páginas4 Ley de NewtonAndrea GómezAinda não há avaliações
- Interpretación Del Área Bajo La Curva en Las GraficasDocumento11 páginasInterpretación Del Área Bajo La Curva en Las GraficasMceyadira RodriguezAinda não há avaliações
- Capitulo 8 Análisis de Estado Senoidal PermanenteDocumento25 páginasCapitulo 8 Análisis de Estado Senoidal PermanenteJaime Andrés EspinosaAinda não há avaliações
- 11 BtiDocumento41 páginas11 BtiTus TareasAinda não há avaliações
- Programa de Fisica I QQFF 2022Documento4 páginasPrograma de Fisica I QQFF 2022Adrian José Cabrera ReyesAinda não há avaliações
- Mesa de Flujo Laminar y Analogías de StokesDocumento27 páginasMesa de Flujo Laminar y Analogías de Stokeseder80% (5)
- Apuntes + Ejercicios ExtraDocumento2 páginasApuntes + Ejercicios ExtraVioleta BoevaAinda não há avaliações
- Unidad5 FisicaDocumento14 páginasUnidad5 FisicaIsrael AguirreAinda não há avaliações
- Guia Pictogram RoomDocumento54 páginasGuia Pictogram Roomjsantam28157100% (1)
- Flujo IrrotacionalDocumento8 páginasFlujo IrrotacionalVyktor Leon100% (1)
- S04.s4 Movimiento General Plano en Un Sistema de Referencia FijoDocumento35 páginasS04.s4 Movimiento General Plano en Un Sistema de Referencia FijoAda RamirezAinda não há avaliações
- Taller de FísicaDocumento4 páginasTaller de FísicaJosstinFernneyValenciaAinda não há avaliações
- Calculadora 1 2 3Documento15 páginasCalculadora 1 2 3vivijacome123Ainda não há avaliações
- Tiro Parabolico.Documento8 páginasTiro Parabolico.Gámez García Fernando JoséAinda não há avaliações
- Clase 3.MOVIMIENTO CURVILÍNEODocumento28 páginasClase 3.MOVIMIENTO CURVILÍNEONatalia SelbAinda não há avaliações
- Bimestral 2P 11FDocumento2 páginasBimestral 2P 11FEdwin RiosAinda não há avaliações