Você também pode gostar
- Openers 1Documento9 páginasOpeners 1Tona Glez HerreraAinda não há avaliações
- Ejercicios para El HumorDocumento24 páginasEjercicios para El HumorTona Glez HerreraAinda não há avaliações
- SlobotskyDocumento1 páginaSlobotskyTona Glez HerreraAinda não há avaliações
- Comedia Es Verdad y DolorDocumento3 páginasComedia Es Verdad y DolorTona Glez HerreraAinda não há avaliações
- 10 PidDocumento26 páginas10 PidTona Glez Herrera100% (1)
- AlebrijessssDocumento4 páginasAlebrijessssTona Glez HerreraAinda não há avaliações
- 1 MicrocontroladoresDocumento9 páginas1 MicrocontroladoresTona Glez Herrera0% (1)
- Esculturas HieloDocumento4 páginasEsculturas HieloTona Glez HerreraAinda não há avaliações
- Lab. Qaii Practica 3 Det. Bi en Fármaco Por ComplejometríaDocumento2 páginasLab. Qaii Practica 3 Det. Bi en Fármaco Por ComplejometríaToramaru Utsunomiya50% (2)
- Requerimiento-Residente de ObraDocumento5 páginasRequerimiento-Residente de ObraCesar Quispe MolinaAinda não há avaliações
- Método DrossDocumento2 páginasMétodo DrossInes Maria Figueroa PoleoAinda não há avaliações
- Caso InditexDocumento13 páginasCaso Inditexelvis2709487100% (2)
- Sena 1Documento5 páginasSena 1Liliana AcostaAinda não há avaliações
- HLM - ASM - Diri - Sem 02Documento2 páginasHLM - ASM - Diri - Sem 02Carlos Martín Medina TáberAinda não há avaliações
- Gralanat RardDocumento162 páginasGralanat RardTacna AricaAinda não há avaliações
- Guía 8° y Ticket Comprensión Lectora 13Documento2 páginasGuía 8° y Ticket Comprensión Lectora 13CristalAinda não há avaliações
- A 62 Grados Bajo Cero - Alaska - Llorente SegundoDocumento71 páginasA 62 Grados Bajo Cero - Alaska - Llorente SegundoPablo BadanoAinda não há avaliações
- Diagnostico Molecular: Adn Y ArnDocumento50 páginasDiagnostico Molecular: Adn Y ArnSalomé MontenegroAinda não há avaliações
- Arte y ReligiónDocumento10 páginasArte y ReligiónARIANA LOPEZ100% (1)
- Instituto de Chepen - GuadaDocumento4 páginasInstituto de Chepen - GuadacristianAinda não há avaliações
- 3 - DOP - Agregada - Ejemplos de Clase (3 Planes) - PlantillaDocumento3 páginas3 - DOP - Agregada - Ejemplos de Clase (3 Planes) - PlantillaJenny .Ainda não há avaliações
- Flag Football 2Documento15 páginasFlag Football 2Diego Alejandro Moreno Dimey100% (1)
- Rendicion AudienciaDocumento4 páginasRendicion AudienciaAlex Ronald ECAinda não há avaliações
- NOMENCLATURADocumento5 páginasNOMENCLATURANatalia Peña CetinaAinda não há avaliações
- Resumen Ejecutivo Diciembre 2018Documento65 páginasResumen Ejecutivo Diciembre 2018Daniela Rodriguez CuartasAinda não há avaliações
- Aldiss, Brian W. - El Suave DilemaDocumento21 páginasAldiss, Brian W. - El Suave DilemaCristhian TorresAinda não há avaliações
- Propuesta de Plan Manejo para La ZetaDocumento152 páginasPropuesta de Plan Manejo para La ZetaPuertae Colectivo de NoticiasAinda não há avaliações
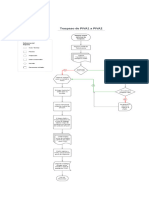
- Procesos de Envios de PIVA1 A PIVA2Documento1 páginaProcesos de Envios de PIVA1 A PIVA2casa.maravillas273Ainda não há avaliações
- EME MMPV03 ContenidosDocumento22 páginasEME MMPV03 Contenidospradera negraAinda não há avaliações
- Cuadernillo 4to 07Documento78 páginasCuadernillo 4to 07Anonymous jaDmtyU3Ainda não há avaliações
- Ficha Tecnica k3 AdamaDocumento4 páginasFicha Tecnica k3 Adamanoe martinAinda não há avaliações
- FMQ-006 Reporte Prueba de Presión HidrostáticaDocumento1 páginaFMQ-006 Reporte Prueba de Presión HidrostáticaAntonioAinda não há avaliações
- Historia de La CalidadDocumento2 páginasHistoria de La CalidadCrystell Aguilar CarballoAinda não há avaliações
- Share PT Serv Tech RefDocumento792 páginasShare PT Serv Tech RefGabriel VillayzanAinda não há avaliações
- BATALLANDocumento24 páginasBATALLANMariel BufariniAinda não há avaliações
- Alicia Flores Tarea 4 Protagonistas de Las LimitacionesDocumento4 páginasAlicia Flores Tarea 4 Protagonistas de Las LimitacionesAlicia Flores100% (1)
- Norma Técnica Ntc-Iso Colombiana 22000Documento18 páginasNorma Técnica Ntc-Iso Colombiana 22000Natalia ApolinarAinda não há avaliações
- Casos GeneralesDocumento7 páginasCasos Generaleshelena briones castañedaAinda não há avaliações