Você também pode gostar
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeNo EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeNota: 4 de 5 estrelas4/5 (5794)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreNo EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreNota: 4 de 5 estrelas4/5 (1090)
- Never Split the Difference: Negotiating As If Your Life Depended On ItNo EverandNever Split the Difference: Negotiating As If Your Life Depended On ItNota: 4.5 de 5 estrelas4.5/5 (838)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceNo EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceNota: 4 de 5 estrelas4/5 (895)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersNo EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersNota: 4.5 de 5 estrelas4.5/5 (345)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureNo EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureNota: 4.5 de 5 estrelas4.5/5 (474)
- The Emperor of All Maladies: A Biography of CancerNo EverandThe Emperor of All Maladies: A Biography of CancerNota: 4.5 de 5 estrelas4.5/5 (271)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)No EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Nota: 4.5 de 5 estrelas4.5/5 (121)
- The Little Book of Hygge: Danish Secrets to Happy LivingNo EverandThe Little Book of Hygge: Danish Secrets to Happy LivingNota: 3.5 de 5 estrelas3.5/5 (400)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyNo EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyNota: 3.5 de 5 estrelas3.5/5 (2259)
- The Yellow House: A Memoir (2019 National Book Award Winner)No EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Nota: 4 de 5 estrelas4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaNo EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaNota: 4.5 de 5 estrelas4.5/5 (266)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryNo EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryNota: 3.5 de 5 estrelas3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnNo EverandTeam of Rivals: The Political Genius of Abraham LincolnNota: 4.5 de 5 estrelas4.5/5 (234)
- The Unwinding: An Inner History of the New AmericaNo EverandThe Unwinding: An Inner History of the New AmericaNota: 4 de 5 estrelas4/5 (45)
- Go Betweens For HitlerDocumento402 páginasGo Betweens For HitlerSagyan Regmi Regmi100% (1)
- Expository Essay Rough DraftDocumento4 páginasExpository Essay Rough Draftapi-292792461Ainda não há avaliações
- Harrah's Entertainment Inc: Submitted To: Prof. Shubhamoy DeyDocumento6 páginasHarrah's Entertainment Inc: Submitted To: Prof. Shubhamoy DeyAbhinav UtkarshAinda não há avaliações
- Chapter 7 - Destructive and Non Destructive Testing of MaterialDocumento33 páginasChapter 7 - Destructive and Non Destructive Testing of MaterialzainonayraAinda não há avaliações
- Chapter 5Documento14 páginasChapter 5zainonayraAinda não há avaliações
- An Academic Research Publishing Checklist: Brian WhitworthDocumento12 páginasAn Academic Research Publishing Checklist: Brian WhitworthzainonayraAinda não há avaliações
- Identify and Inspect Solenoid Valve: Basic Hydraulic & Pneumatic System 2Documento12 páginasIdentify and Inspect Solenoid Valve: Basic Hydraulic & Pneumatic System 2zainonayraAinda não há avaliações
- Identify Air Compressor: Basic Hydraulic & Pneumatic System 2Documento12 páginasIdentify Air Compressor: Basic Hydraulic & Pneumatic System 2zainonayraAinda não há avaliações
- Architecture: The Art and Design That Goes Into Making Buildings Is Known As ArchitectureDocumento3 páginasArchitecture: The Art and Design That Goes Into Making Buildings Is Known As ArchitecturezainonayraAinda não há avaliações
- L5 Laws of Logarithms WorksheetDocumento2 páginasL5 Laws of Logarithms WorksheetzainonayraAinda não há avaliações
- Free Enterprise TestDocumento6 páginasFree Enterprise TestSupriyasingh16Ainda não há avaliações
- The Business Case For Process SafetyDocumento24 páginasThe Business Case For Process SafetyzainonayraAinda não há avaliações
- Small Business Subcontracting Program: The University of Texas at AustinDocumento28 páginasSmall Business Subcontracting Program: The University of Texas at AustinzainonayraAinda não há avaliações
- Aircraft Instrument SystemsDocumento35 páginasAircraft Instrument SystemszainonayraAinda não há avaliações
- A Force That Opposes - Acts Parallel To The: Motion Surfaces in ContactDocumento37 páginasA Force That Opposes - Acts Parallel To The: Motion Surfaces in ContactzainonayraAinda não há avaliações
- 2 2TypesofForcesDocumento24 páginas2 2TypesofForceszainonayraAinda não há avaliações
- Complete The Following Table. Fraction Decimal Percentage X 100Documento4 páginasComplete The Following Table. Fraction Decimal Percentage X 100zainonayraAinda não há avaliações
- Blue Oceans and Other Big IdeasDocumento33 páginasBlue Oceans and Other Big IdeaszainonayraAinda não há avaliações
- Roller ConveyorDocumento6 páginasRoller ConveyorzainonayraAinda não há avaliações
- Type of Failure in Conveyor SystemDocumento13 páginasType of Failure in Conveyor Systemzainonayra100% (2)
- Guidebook IPTSDocumento77 páginasGuidebook IPTSzainonayra0% (1)
- Week 9-1 - H0 and H1 (Updated)Documento11 páginasWeek 9-1 - H0 and H1 (Updated)Phan Hung SonAinda não há avaliações
- MAT565 - Tutorial - Inverse LaplaceDocumento2 páginasMAT565 - Tutorial - Inverse LaplacefaqhrulAinda não há avaliações
- Mechanistic-Empirical Pavement Design GuideDocumento3 páginasMechanistic-Empirical Pavement Design Guidelelu8210Ainda não há avaliações
- Vessel Nozzle PDFDocumento30 páginasVessel Nozzle PDFEugenia LorenzaAinda não há avaliações
- Industrial Hydraulics Trainer's Project Manual PDFDocumento57 páginasIndustrial Hydraulics Trainer's Project Manual PDFrichardppz124100% (2)
- Change of Subject-To Principal HVMDocumento3 páginasChange of Subject-To Principal HVMPrantik SealAinda não há avaliações
- Ex 5308-Alexandra Thedeby-Heating and Cooling With Solar Powered Peltier ElementsDocumento93 páginasEx 5308-Alexandra Thedeby-Heating and Cooling With Solar Powered Peltier ElementsMohammad NaufalAinda não há avaliações
- It (Cesec - Form 4 - 5) OutlineDocumento7 páginasIt (Cesec - Form 4 - 5) Outlineapi-287025606Ainda não há avaliações
- SAVol 8 June 2010 Indian Color Part 3Documento272 páginasSAVol 8 June 2010 Indian Color Part 3SaptarishisAstrology67% (3)
- Extra Counting ProblemsDocumento25 páginasExtra Counting ProblemsWilson ZhangAinda não há avaliações
- HvyyjbbDocumento128 páginasHvyyjbbAyashkanta RoutAinda não há avaliações
- Ellenberger - Psychiatry From Ancient To Modern TimesDocumento76 páginasEllenberger - Psychiatry From Ancient To Modern TimesSiegfriedCristoforAinda não há avaliações
- Case Study ResearchDocumento20 páginasCase Study ResearchManish PuttyahAinda não há avaliações
- Weather Phenomena MatrixDocumento4 páginasWeather Phenomena MatrixsetolazarAinda não há avaliações
- List of Astrology BooksDocumento19 páginasList of Astrology BooksChetan SharmaAinda não há avaliações
- Surface Tension Theory - EDocumento11 páginasSurface Tension Theory - EthinkiitAinda não há avaliações
- (Intelligent Systems, Control and Automation_ Science and Engineering 72) B. S. Goh, W. J. Leong, K. L. Teo (Auth.), Honglei Xu, Xiangyu Wang (Eds.)-Optimization and Control Methods in Industrial EngiDocumento300 páginas(Intelligent Systems, Control and Automation_ Science and Engineering 72) B. S. Goh, W. J. Leong, K. L. Teo (Auth.), Honglei Xu, Xiangyu Wang (Eds.)-Optimization and Control Methods in Industrial EngiVu Duc TruongAinda não há avaliações
- Viltam User Manual enDocumento13 páginasViltam User Manual enszol888Ainda não há avaliações
- Q1. Read The Passage Below and Answer The Questions That FollowDocumento3 páginasQ1. Read The Passage Below and Answer The Questions That FollowAryan KananiAinda não há avaliações
- German Short Stories For BeginnersDocumento82 páginasGerman Short Stories For BeginnersHùynh Ngọc DiễmAinda não há avaliações
- How To Verify SSL Certificate From A Shell PromptDocumento4 páginasHow To Verify SSL Certificate From A Shell Promptchinku85Ainda não há avaliações
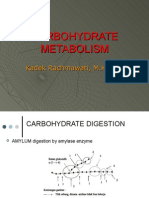
- Carbohydrate MetabolismDocumento38 páginasCarbohydrate Metabolismwidya nurrohmanAinda não há avaliações
- Dario Great Wall of China Lesson PlanDocumento3 páginasDario Great Wall of China Lesson Planapi-297914033Ainda não há avaliações
- Deloitte IT Governance SurveyDocumento20 páginasDeloitte IT Governance Surveymrehan2k2Ainda não há avaliações
- FMD PPT For SeminarDocumento15 páginasFMD PPT For Seminarucantseeme0000Ainda não há avaliações
- National AnthemsDocumento6 páginasNational AnthemszhannurazimbaiAinda não há avaliações
- Eindhoven University of Technology: Award Date: 2008Documento65 páginasEindhoven University of Technology: Award Date: 2008Jay Mark VillarealAinda não há avaliações