Você também pode gostar
- Traditional Advanced Control Strategies OverviewDocumento48 páginasTraditional Advanced Control Strategies Overviewcape iipeAinda não há avaliações
- Power Plant ControlDocumento42 páginasPower Plant Controlsourav57% (7)
- Feedforward Control (前馈控制) : Lei Xie Institute of Industrial Control, Zhejiang University, Hangzhou, P. R. ChinaDocumento18 páginasFeedforward Control (前馈控制) : Lei Xie Institute of Industrial Control, Zhejiang University, Hangzhou, P. R. ChinaankurAinda não há avaliações
- Improve Process Control with FeedforwardDocumento49 páginasImprove Process Control with FeedforwardAudrey Patrick KallaAinda não há avaliações
- Traditional Advanced Control Approaches - Feedforward, Cascade and Selected ControlDocumento42 páginasTraditional Advanced Control Approaches - Feedforward, Cascade and Selected Controljricardo01976Ainda não há avaliações
- Process Control: Designing Process and Control Systems For Dynamic PerformanceDocumento42 páginasProcess Control: Designing Process and Control Systems For Dynamic PerformanceMercy JohnAinda não há avaliações
- Control StrategyDocumento44 páginasControl StrategyAyunie FazlinAinda não há avaliações
- HVDC ControlDocumento128 páginasHVDC ControlabhilashAinda não há avaliações
- © Career Avenues A1Documento160 páginas© Career Avenues A1Nomee PatelAinda não há avaliações
- Heat Exchanger Process Practical 2 Feedforwrd2Documento11 páginasHeat Exchanger Process Practical 2 Feedforwrd2bhavinaAinda não há avaliações
- Standards Certification Education & Training for Boiler Control SystemsDocumento41 páginasStandards Certification Education & Training for Boiler Control SystemsTapiwa MuzondoAinda não há avaliações
- Pid Controller: Ashok.S 500017496 M.Tech Pde R670211016Documento40 páginasPid Controller: Ashok.S 500017496 M.Tech Pde R670211016Ashik Jacob Oommen100% (1)
- Control SystemDocumento48 páginasControl SystemOlawale John AdeotiAinda não há avaliações
- Auto Control Loops in Thermal Power Plant: Sith - Ananda KumarDocumento37 páginasAuto Control Loops in Thermal Power Plant: Sith - Ananda KumarVignesh RajanAinda não há avaliações
- Process Control FundamentalsDocumento923 páginasProcess Control FundamentalsAudrey Patrick Kalla100% (2)
- Chapter 7 - Feedback ControllersDocumento44 páginasChapter 7 - Feedback ControllersPravin Nair50% (2)
- 210 Technical SpecificationDocumento28 páginas210 Technical SpecificationquaressAinda não há avaliações
- Lecture Notes: Engineer Stanford MudonoDocumento10 páginasLecture Notes: Engineer Stanford MudonoByron MawoyoAinda não há avaliações
- 18 Ratio, Selective, Override ControlDocumento66 páginas18 Ratio, Selective, Override ControlSubodhAinda não há avaliações
- Sebh539010 S PC750-6 PPDocumento15 páginasSebh539010 S PC750-6 PPmax100% (1)
- Common-rail Diesel Diagnosis GuideDocumento102 páginasCommon-rail Diesel Diagnosis GuideJuan Junior Asto Torres100% (1)
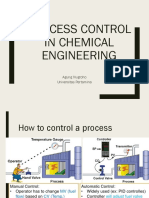
- Process Control in Chemical Engineering: Agung Nugroho Universitas PertaminaDocumento23 páginasProcess Control in Chemical Engineering: Agung Nugroho Universitas PertaminaShilpya KurniasihAinda não há avaliações
- Control Systems Modeling and DesignDocumento37 páginasControl Systems Modeling and DesignshrnbolonneAinda não há avaliações
- Unit 3Documento67 páginasUnit 3Raghul T100% (1)
- System Overview Digital Turbine Control SystemsDocumento56 páginasSystem Overview Digital Turbine Control SystemsAshutosh Yadav100% (2)
- Gov Simulator 23.12.06Documento46 páginasGov Simulator 23.12.06Sam100% (2)
- Controller PrincipleDocumento24 páginasController PrinciplePortia ShilengeAinda não há avaliações
- HP LP Bypass System (MB Power) 10june15Documento18 páginasHP LP Bypass System (MB Power) 10june15dilbagh_scribd100% (3)
- Boiler LogicsDocumento42 páginasBoiler LogicsSupratim Pal100% (1)
- PDC Chapter 8Documento49 páginasPDC Chapter 8satya sagarAinda não há avaliações
- Chap 08 Marlin 2002Documento37 páginasChap 08 Marlin 2002Audrey Patrick KallaAinda não há avaliações
- Design and Control Models: L02 - 1 Control of Chemical ProcessesDocumento36 páginasDesign and Control Models: L02 - 1 Control of Chemical ProcessesPutrosAinda não há avaliações
- Introduction to Auto Control Loops in Thermal Power PlantsDocumento19 páginasIntroduction to Auto Control Loops in Thermal Power PlantsSai SwaroopAinda não há avaliações
- ch10 - ModifiedDocumento125 páginasch10 - ModifiedYato SenkaiAinda não há avaliações
- Fractionation Tower Controls-Part 1Documento38 páginasFractionation Tower Controls-Part 1Rebekah Schmidt100% (1)
- Process Control LoopsDocumento40 páginasProcess Control LoopsjohnAinda não há avaliações
- Implementation of LCC HVDC Converter TransformerDocumento6 páginasImplementation of LCC HVDC Converter Transformerdhuamani01Ainda não há avaliações
- University of Palestine: Electrical Machine & Control SystemsDocumento26 páginasUniversity of Palestine: Electrical Machine & Control SystemsHatem DheerAinda não há avaliações
- Auto Loops TVNLDocumento144 páginasAuto Loops TVNLRajeevAgrawalAinda não há avaliações
- Chapter 9 ChangDocumento37 páginasChapter 9 Changsatya sagarAinda não há avaliações
- PROCESS CONTROL & INSTRUMENTATION: KEY CONCEPTS, MODELING, AND CONTROL STRATEGIESDocumento11 páginasPROCESS CONTROL & INSTRUMENTATION: KEY CONCEPTS, MODELING, AND CONTROL STRATEGIESgongweejieAinda não há avaliações
- Tutorial 1Documento2 páginasTutorial 1dkAinda não há avaliações
- Cascade, Ratio, and Feedforward ControlDocumento47 páginasCascade, Ratio, and Feedforward ControlSteaphnie_Sava_5881Ainda não há avaliações
- Project Based Learning IcsDocumento14 páginasProject Based Learning IcsAvinash YadavAinda não há avaliações
- 5 TempLpDocumento8 páginas5 TempLpGonzalo Ccamaque ArotaipeAinda não há avaliações
- Instrumentation and Process Control (IPC)Documento35 páginasInstrumentation and Process Control (IPC)M Arslan AshrafAinda não há avaliações
- Paper 5-CMC Implementation Unchahar PDFDocumento48 páginasPaper 5-CMC Implementation Unchahar PDFumeshAinda não há avaliações
- Control System-Ii Lab File: Bachelor of Engineering (Division of Instrumentation & ControlDocumento41 páginasControl System-Ii Lab File: Bachelor of Engineering (Division of Instrumentation & ControlParas SinghAinda não há avaliações
- Duties & Responsibilities of Shift EngineerDocumento35 páginasDuties & Responsibilities of Shift EngineerNaveen ChodagiriAinda não há avaliações
- Typical process units control: Chemical Reactors Distillation columns Boilers CompressorsDocumento45 páginasTypical process units control: Chemical Reactors Distillation columns Boilers CompressorsAdrian Fernandez BelloAinda não há avaliações
- Process Control Fundamentals - ADDDocumento115 páginasProcess Control Fundamentals - ADDAsifAinda não há avaliações
- Tài Liệu Môn Thực Tập Kỹ Thuật Điều Khiển Tự Động Và Điều Khiển Quá TrìnhDocumento220 páginasTài Liệu Môn Thực Tập Kỹ Thuật Điều Khiển Tự Động Và Điều Khiển Quá Trình20146054Ainda não há avaliações
- Ehtc LatestDocumento34 páginasEhtc Latestbharat5100100% (3)
- SH 5107 System Design 2021 - LumiNUSDocumento110 páginasSH 5107 System Design 2021 - LumiNUSShuyuan LuAinda não há avaliações
- Control Case StudiesDocumento57 páginasControl Case StudiesAnninha FlavioAinda não há avaliações
- TECHNICAL ABBREVIATIONS AND ACRONYMS GUIDEDocumento7 páginasTECHNICAL ABBREVIATIONS AND ACRONYMS GUIDEE.D.W “vet” witokoAinda não há avaliações
- Analog Circuit Design Volume 2: Immersion in the Black Art of Analog DesignNo EverandAnalog Circuit Design Volume 2: Immersion in the Black Art of Analog DesignAinda não há avaliações
- Power Systems-On-Chip: Practical Aspects of DesignNo EverandPower Systems-On-Chip: Practical Aspects of DesignBruno AllardAinda não há avaliações
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2No EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2Ainda não há avaliações
- 143-148 MaraisDocumento6 páginas143-148 MaraisgarcogiazAinda não há avaliações
- SV 9000 ReadyDocumento223 páginasSV 9000 ReadyvickersAinda não há avaliações
- X-EM Mod Bus RegistersDocumento13 páginasX-EM Mod Bus RegistersgarcogiazAinda não há avaliações
- Image analysis technique extracts copper froth surface featuresDocumento9 páginasImage analysis technique extracts copper froth surface featuresgarcogiazAinda não há avaliações
- Intro Ducci On Control OptimoDocumento10 páginasIntro Ducci On Control OptimoFernando MendezAinda não há avaliações
- AP 04209001 eDocumento4 páginasAP 04209001 egarcogiazAinda não há avaliações
- Choosing Enclosed Control Adjustable Frequency Drive OptionsDocumento4 páginasChoosing Enclosed Control Adjustable Frequency Drive OptionsgarcogiazAinda não há avaliações
- A Real Time Visual Sensor For Supervision of Flotation CellsDocumento11 páginasA Real Time Visual Sensor For Supervision of Flotation CellsgarcogiazAinda não há avaliações
- Design, Construction and Evaluation of A Fan SpeedDocumento13 páginasDesign, Construction and Evaluation of A Fan Speedvele2ionutAinda não há avaliações
- Processes With Deadtime, Internal Model ControlDocumento19 páginasProcesses With Deadtime, Internal Model ControlChristianaPrasetyaAinda não há avaliações
- Vacon NX OPTCQ Ethernet IP Board User Manual DPD00Documento40 páginasVacon NX OPTCQ Ethernet IP Board User Manual DPD00garcogiazAinda não há avaliações
- Process Control Fundamentals 2Documento73 páginasProcess Control Fundamentals 2Otuekong Ukpong100% (2)
- PCT 386752Documento48 páginasPCT 386752garcogiazAinda não há avaliações
- ASAE S448 Thin-Layer DryingDocumento3 páginasASAE S448 Thin-Layer DryinggarcogiazAinda não há avaliações
- Liq ADS 43-001 PDFDocumento4 páginasLiq ADS 43-001 PDFgarcogiazAinda não há avaliações
- Paper CD 343 TA2 SpeedamDocumento6 páginasPaper CD 343 TA2 SpeedamgarcogiazAinda não há avaliações
- Ten Scientific Challenges for 6G: Rethinking the Foundations of Communications TheoryDocumento18 páginasTen Scientific Challenges for 6G: Rethinking the Foundations of Communications TheorySurabhi KarandikarAinda não há avaliações
- Finding The Buckling Load of Non-Uniform Columns Using The Iteration Perturbation MethodDocumento6 páginasFinding The Buckling Load of Non-Uniform Columns Using The Iteration Perturbation MethodAhmed MohammedAinda não há avaliações
- Traffic Flow Simulation by Using A Mathematical Model Based OnDocumento4 páginasTraffic Flow Simulation by Using A Mathematical Model Based Onhkabir_juAinda não há avaliações
- MATHENG4 Differential EquationsDocumento66 páginasMATHENG4 Differential EquationsJed Guzarem YbañezAinda não há avaliações
- Student Slides M4Documento10 páginasStudent Slides M4captainhassAinda não há avaliações
- Engg Mathematics GATE BookDocumento24 páginasEngg Mathematics GATE Bookकोरे स्वप्नAinda não há avaliações
- Course Title: Applied Mathematics-III (MATH211) : Module-I, Lecture-5: Non-Linear PDE of The Standard FormDocumento18 páginasCourse Title: Applied Mathematics-III (MATH211) : Module-I, Lecture-5: Non-Linear PDE of The Standard FormSahil JainAinda não há avaliações
- GT Strudl Presentation BaseplateDocumento123 páginasGT Strudl Presentation Baseplateeuric82Ainda não há avaliações
- Analytic Soliton Solutions of Cubic-Quintic Ginzburg-Landau Equation With Variable Nonlinearity and Spectral Filtering in Fiber LasersDocumento11 páginasAnalytic Soliton Solutions of Cubic-Quintic Ginzburg-Landau Equation With Variable Nonlinearity and Spectral Filtering in Fiber LasersDiego HenriqueAinda não há avaliações
- Computational Heat Transfer, VOL1 Mathematical Modelling - 1995 PDFDocumento417 páginasComputational Heat Transfer, VOL1 Mathematical Modelling - 1995 PDFAhmadreza Aminian100% (9)
- Edward L Wilson - BioDocumento7 páginasEdward L Wilson - BioAlirio Rafael Martinez MartinezAinda não há avaliações
- WEEK 5 SOLUTION METHODS FOR SIMULTANEOUS NLEs 2Documento35 páginasWEEK 5 SOLUTION METHODS FOR SIMULTANEOUS NLEs 2Demas JatiAinda não há avaliações
- MSC Nastran 2012 Implicit Nonlinear (SOL 600) User's GuideDocumento538 páginasMSC Nastran 2012 Implicit Nonlinear (SOL 600) User's GuideMSC Nastran Beginner0% (1)
- Process Dynamics and Control Cap 13Documento13 páginasProcess Dynamics and Control Cap 13Juliana 97Ainda não há avaliações
- The Effects of Material Properties On Rebound Characteristics of Deris in Automobile CrashDocumento5 páginasThe Effects of Material Properties On Rebound Characteristics of Deris in Automobile CrashKuldeep SinghAinda não há avaliações
- Stochastic ProgrammingDocumento315 páginasStochastic Programmingfeiying1980100% (1)
- Existence and Uniqueness of Solutions For Nonlinear Impulsive Differential Equations With Three-Point and Integral Boundary ConditionsDocumento17 páginasExistence and Uniqueness of Solutions For Nonlinear Impulsive Differential Equations With Three-Point and Integral Boundary ConditionsInforma.azAinda não há avaliações
- New Century Maths Year 10 5.2 Teaching ProgramDocumento31 páginasNew Century Maths Year 10 5.2 Teaching ProgramEileenAinda não há avaliações
- Stevan Pilipović: Stevan - Pilipovic@dmi - Uns.ac - RsDocumento3 páginasStevan Pilipović: Stevan - Pilipovic@dmi - Uns.ac - Rslformula6429Ainda não há avaliações
- Balasto NormasDocumento19 páginasBalasto NormasAlinat KoraymaAinda não há avaliações
- AC02 - Contact BasicsDocumento36 páginasAC02 - Contact BasicsLuis MontoyaAinda não há avaliações
- Application of Operations Research in Steel IndustryDocumento7 páginasApplication of Operations Research in Steel IndustryInternational Journal of Innovative Science and Research TechnologyAinda não há avaliações
- What NARX Networks Can ComputeDocumento8 páginasWhat NARX Networks Can Computecristian_masterAinda não há avaliações
- Oscillations in Planar Dynamic Systems - Compress PDFDocumento332 páginasOscillations in Planar Dynamic Systems - Compress PDF杨畅Ainda não há avaliações
- FEAP Finite Element Analysis Program User ManualDocumento615 páginasFEAP Finite Element Analysis Program User ManualManuel Alizo MirabalAinda não há avaliações
- Inverted Pendulum PDFDocumento32 páginasInverted Pendulum PDFudayAinda não há avaliações
- Article AMB First PNGDocumento31 páginasArticle AMB First PNGFABIEN KENMOGNEAinda não há avaliações
- Self Excited Periodic Motion in Underactuated Mechanical S - 2022 - Fuzzy Sets ADocumento21 páginasSelf Excited Periodic Motion in Underactuated Mechanical S - 2022 - Fuzzy Sets AANDAHMOU SoulaimanAinda não há avaliações
- Nonlinear differential equations explainedDocumento3 páginasNonlinear differential equations explainedvijay kumar honnaliAinda não há avaliações
- SssDocumento40 páginasSssDom DeSiciliaAinda não há avaliações