Você também pode gostar
- Basic Motor Formulas and Calculations PDFDocumento11 páginasBasic Motor Formulas and Calculations PDFAditya Shrivastava100% (2)
- Study of a reluctance magnetic gearbox for energy storage system applicationNo EverandStudy of a reluctance magnetic gearbox for energy storage system applicationNota: 1 de 5 estrelas1/5 (1)
- Physics For IIT JEE Vol 2 How To Read The BookDocumento24 páginasPhysics For IIT JEE Vol 2 How To Read The BookNaveen Kumar SinghAinda não há avaliações
- Physics ProjectDocumento17 páginasPhysics ProjectNarender Singh82% (131)
- Guide to Spherical DronesDocumento53 páginasGuide to Spherical Dronesutkarshsabberwal100% (2)
- Grob Basic Electronics Book ReviewDocumento56 páginasGrob Basic Electronics Book ReviewFranzDimaapi50% (2)
- Energy Conversion 17Documento10 páginasEnergy Conversion 17krishnareddy_chintalaAinda não há avaliações
- INDUCTION MOTOR TORQUE-SPEED CURVEDocumento10 páginasINDUCTION MOTOR TORQUE-SPEED CURVEprasad243243Ainda não há avaliações
- Induction Motor 1Documento34 páginasInduction Motor 1hitesh89Ainda não há avaliações
- Induction Motors: The Concept of Rotor SlipDocumento12 páginasInduction Motors: The Concept of Rotor Sliphafiz_jaaffarAinda não há avaliações
- Calculating Motor Start TimeDocumento8 páginasCalculating Motor Start TimeRaj SekharAinda não há avaliações
- EEEB413 Electro-Mechanical SystemsDocumento45 páginasEEEB413 Electro-Mechanical SystemsLynda909Ainda não há avaliações
- Presentation On Power and Torque of Induction MotorDocumento30 páginasPresentation On Power and Torque of Induction MotorNewCandle100% (1)
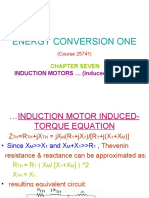
- Derivation of Induction Motor Induced Torque EquationDocumento31 páginasDerivation of Induction Motor Induced Torque Equationmalik karim dadAinda não há avaliações
- Dr. Ali Abdul Razzaq ALTAHIR: Lecture 6: Third ClassDocumento20 páginasDr. Ali Abdul Razzaq ALTAHIR: Lecture 6: Third ClassAli Altahir100% (1)
- Lec4 Polyphase Induction Motor IIDocumento14 páginasLec4 Polyphase Induction Motor IIMohammed Dyhia AliAinda não há avaliações
- Electrical Machines Questions and Answers GuideDocumento56 páginasElectrical Machines Questions and Answers GuideGanesh KumarAinda não há avaliações
- The Induction Motor: A Detailed Look at Its Operation and CharacteristicsDocumento13 páginasThe Induction Motor: A Detailed Look at Its Operation and CharacteristicsAsimAinda não há avaliações
- 390 MotorDocumento14 páginas390 MotorAlex MoiseAinda não há avaliações
- Induction Motor Equivalent CircuitDocumento54 páginasInduction Motor Equivalent CircuitWinston LibangaAinda não há avaliações
- Chapter 6.2 - Speed Control of Ac MotorDocumento45 páginasChapter 6.2 - Speed Control of Ac MotorWeehao SiowAinda não há avaliações
- Induction GeneratorsDocumento16 páginasInduction GeneratorsAjai BAinda não há avaliações
- DC Motor: Dr. Mohammed Moshiul HoqueDocumento43 páginasDC Motor: Dr. Mohammed Moshiul Hoquesagar378Ainda não há avaliações
- Induction Motor Drive Control MethodsDocumento8 páginasInduction Motor Drive Control MethodsRudra Kumar MishraAinda não há avaliações
- EV Class NotesDocumento30 páginasEV Class NotesVinod BabaleshwarAinda não há avaliações
- Application Guide For Selecting Ac Motors Capable of Overcoming Fan Inertia Fe 1800Documento8 páginasApplication Guide For Selecting Ac Motors Capable of Overcoming Fan Inertia Fe 1800cavasqueAinda não há avaliações
- DTrends Feb 2011Documento14 páginasDTrends Feb 2011Rui AllenAinda não há avaliações
- Induction MotorDocumento39 páginasInduction MotorAhmed MagdyAinda não há avaliações
- Load EqualisationDocumento4 páginasLoad EqualisationLaxmikant BagaleAinda não há avaliações
- Energy Conversion One: INDUCTION MOTORS (Maximum Torque )Documento83 páginasEnergy Conversion One: INDUCTION MOTORS (Maximum Torque )bilalAinda não há avaliações
- Poly-Phase Induction MotorDocumento27 páginasPoly-Phase Induction Motorjaveria zafeerAinda não há avaliações
- CONTROL OF INDUCTION MOTORS FOR TRACTION SYSTEMSDocumento9 páginasCONTROL OF INDUCTION MOTORS FOR TRACTION SYSTEMSLaurence MichaelAinda não há avaliações
- Final Control ElementsDocumento76 páginasFinal Control ElementsUtkarsh ModiAinda não há avaliações
- AC MachinesDocumento62 páginasAC MachinesNaveena ShreeAinda não há avaliações
- AC Machines Lab. Experiment No.2: University Electronics Engineering College Systems and Control DepDocumento6 páginasAC Machines Lab. Experiment No.2: University Electronics Engineering College Systems and Control DepQusai JamalAinda não há avaliações
- Torque Speed CurveDocumento4 páginasTorque Speed CurveEfosa ImafidonAinda não há avaliações
- Hydro TurbinesDocumento17 páginasHydro TurbinesSavesh Tripathi100% (1)
- Induction Machine-2020Documento95 páginasInduction Machine-2020Bharat SinghAinda não há avaliações
- Variable Speed Drives: Presented By: Nguyen Huu LoiDocumento66 páginasVariable Speed Drives: Presented By: Nguyen Huu LoiLe Hoai Nhat PhuongAinda não há avaliações
- Airpax Stepper MotorDocumento8 páginasAirpax Stepper MotorTiago GalloAinda não há avaliações
- The Basic Motion ControlDocumento3 páginasThe Basic Motion ControlEdgar David UribeAinda não há avaliações
- Brake Torque Application DataDocumento0 páginaBrake Torque Application Dataellie210879Ainda não há avaliações
- Department of Electrical and Computer EngineeringDocumento35 páginasDepartment of Electrical and Computer EngineeringMarlon BoucaudAinda não há avaliações
- A New Soft Starting Method For Wound-Rotor Induction MotorDocumento6 páginasA New Soft Starting Method For Wound-Rotor Induction MotorRoron WicaksonoAinda não há avaliações
- Direct Torque Control (DTC) in Induction Motor: M.G.MorshadDocumento12 páginasDirect Torque Control (DTC) in Induction Motor: M.G.MorshadAdil FarzandAinda não há avaliações
- The Equivalent Circuit and Torque of Three-Phase Induction MotorDocumento11 páginasThe Equivalent Circuit and Torque of Three-Phase Induction Motorعمر تاليونAinda não há avaliações
- Induction (Asynchronous) Machines 1.1Documento9 páginasInduction (Asynchronous) Machines 1.1Areej AdeebAinda não há avaliações
- Electrical Basic KnowledgeDocumento10 páginasElectrical Basic Knowledgetushar shindeAinda não há avaliações
- Deep Bar and Double Cage 010223Documento20 páginasDeep Bar and Double Cage 010223Debankan ChatterjeeAinda não há avaliações
- 3 PH Induction Motor IntroductionDocumento37 páginas3 PH Induction Motor IntroductionNaga Raju AngajalaAinda não há avaliações
- AC Machine Stator Phases and Induction Motor Rotating Magnetic FieldDocumento39 páginasAC Machine Stator Phases and Induction Motor Rotating Magnetic FieldSaneer M SaliAinda não há avaliações
- Motor Sizing Principles 3Documento2 páginasMotor Sizing Principles 3Anesu ChimhowaAinda não há avaliações
- Induction MotorDocumento53 páginasInduction MotoramaliakarinaAinda não há avaliações
- Basic Motor Formulas And Calculations GuideDocumento9 páginasBasic Motor Formulas And Calculations Guidemareymorsy2822100% (1)
- MoappDocumento5 páginasMoappluanleAinda não há avaliações
- Torque EuqtionDocumento13 páginasTorque Euqtionprasad243243Ainda não há avaliações
- State of THDocumento17 páginasState of THjoeAinda não há avaliações
- Et Cs PDFDocumento33 páginasEt Cs PDFsahil borichaAinda não há avaliações
- Week 9a LecturesDocumento25 páginasWeek 9a LecturesAMMARSAALIM KHANAinda não há avaliações
- 02acceleration and Periodic LoadsDocumento5 páginas02acceleration and Periodic LoadsDeepak ChachraAinda não há avaliações
- Influence of System Parameters Using Fuse Protection of Regenerative DC DrivesNo EverandInfluence of System Parameters Using Fuse Protection of Regenerative DC DrivesAinda não há avaliações
- Power Electronics Applied to Industrial Systems and Transports, Volume 2: Power Converters and their ControlNo EverandPower Electronics Applied to Industrial Systems and Transports, Volume 2: Power Converters and their ControlNota: 5 de 5 estrelas5/5 (1)
- Advanced Electric Drives: Analysis, Control, and Modeling Using MATLAB / SimulinkNo EverandAdvanced Electric Drives: Analysis, Control, and Modeling Using MATLAB / SimulinkAinda não há avaliações
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2No EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2Ainda não há avaliações
- 1SCC340006C0201 OT2GB07 - 09 Enclosed Safety Switches Switches, 16... 1000 ADocumento71 páginas1SCC340006C0201 OT2GB07 - 09 Enclosed Safety Switches Switches, 16... 1000 AprotectionworkAinda não há avaliações
- ABB Oy Low Voltage Products DocumentDocumento2 páginasABB Oy Low Voltage Products DocumentprotectionworkAinda não há avaliações
- 26 Induction Motor DesignDocumento21 páginas26 Induction Motor DesignLatisha CarterAinda não há avaliações
- Prtoblem J BDocumento24 páginasPrtoblem J BjhpandiAinda não há avaliações
- 1SCC340001M0008 Otp 16H3Documento2 páginas1SCC340001M0008 Otp 16H3protectionworkAinda não há avaliações
- Ball BearingsDocumento24 páginasBall BearingsHosein_s_milaniAinda não há avaliações
- 1SCC317003C0202Documento23 páginas1SCC317003C0202protectionworkAinda não há avaliações
- 1SCC340002M0010 Otp 16... 125Documento2 páginas1SCC340002M0010 Otp 16... 125protectionworkAinda não há avaliações
- 2CDC190022D0201 FBP FieldBusPlug Components - Technical CatalogueDocumento24 páginas2CDC190022D0201 FBP FieldBusPlug Components - Technical CatalogueprotectionworkAinda não há avaliações
- Restricted Earth FaultDocumento26 páginasRestricted Earth FaultAfsar AliAinda não há avaliações
- General Purpose Motors en 12 2006Documento236 páginasGeneral Purpose Motors en 12 2006protectionwork100% (1)
- ABB-DMI Type DC Machines Operating and Maintenance InstructionsDocumento48 páginasABB-DMI Type DC Machines Operating and Maintenance InstructionsElafanAinda não há avaliações
- Protection of Synchronous GeneratorsDocumento117 páginasProtection of Synchronous GeneratorsprotectionworkAinda não há avaliações
- ABB Bearing Currents Abb Technical Guide 5Documento24 páginasABB Bearing Currents Abb Technical Guide 5Fernando MuneraAinda não há avaliações
- 1MRK502013-UEN B en Technical Reference Manual Generator Protection IED REG 670 1.1Documento864 páginas1MRK502013-UEN B en Technical Reference Manual Generator Protection IED REG 670 1.1protectionwork100% (1)
- 1MRK502016-UEN B en Application Manual Generator Protection IED REG 670 1.1Documento576 páginas1MRK502016-UEN B en Application Manual Generator Protection IED REG 670 1.1protectionworkAinda não há avaliações
- 1HSM 9543 23-02en Live Tank Circuit Breaker - Application Guide Ed1.1Documento136 páginas1HSM 9543 23-02en Live Tank Circuit Breaker - Application Guide Ed1.1zaidisofianAinda não há avaliações
- 1MRK502016-UEN B en Application Manual Generator Protection IED REG 670 1.1Documento576 páginas1MRK502016-UEN B en Application Manual Generator Protection IED REG 670 1.1protectionworkAinda não há avaliações
- 1VET954910-910 Arc EliminatorDocumento4 páginas1VET954910-910 Arc EliminatorprotectionworkAinda não há avaliações
- Temperature Control Unit 2009 - ArticleDocumento2 páginasTemperature Control Unit 2009 - ArticleprotectionworkAinda não há avaliações
- Grounding and Cabling of The Drive System - Variable Speed DrivesDocumento40 páginasGrounding and Cabling of The Drive System - Variable Speed DrivesMiguel AngelAinda não há avaliações
- Three Phase Capacitor Unit Brochure (2003-06)Documento2 páginasThree Phase Capacitor Unit Brochure (2003-06)protectionworkAinda não há avaliações
- Electrical Fault AnalysisDocumento44 páginasElectrical Fault AnalysisprotectionworkAinda não há avaliações
- Medium Voltage AC DrivesDocumento1 páginaMedium Voltage AC DrivesFlo MircaAinda não há avaliações
- Electrical Fault AnalysisDocumento44 páginasElectrical Fault AnalysisprotectionworkAinda não há avaliações
- Fundamentals - ValvesDocumento52 páginasFundamentals - Valvesapi-3808778100% (2)
- Medium Voltage AC DrivesDocumento1 páginaMedium Voltage AC DrivesFlo MircaAinda não há avaliações
- Erico - Practical Guide To Electrical Grounding PDFDocumento131 páginasErico - Practical Guide To Electrical Grounding PDFperijoyAinda não há avaliações
- Fundamentals - ValvesDocumento52 páginasFundamentals - Valvesapi-3808778100% (2)
- General Physics 2Documento15 páginasGeneral Physics 2Shendy AcostaAinda não há avaliações
- Flow MetersDocumento34 páginasFlow Metersalarcon jasminAinda não há avaliações
- Sarthak PhysicsDocumento10 páginasSarthak PhysicsPriyanshu GautamAinda não há avaliações
- Electrodynamometer-Type Wattmeter: 1. Fixed Coil SystemDocumento21 páginasElectrodynamometer-Type Wattmeter: 1. Fixed Coil SystemJebas ManovaAinda não há avaliações
- UPCET 2021 Syllabus for BHMCT, BFAD, BFA, B.Voc, MBA Integrated & B.DesDocumento21 páginasUPCET 2021 Syllabus for BHMCT, BFAD, BFA, B.Voc, MBA Integrated & B.DesUuu VhhAinda não há avaliações
- EE213 Applied Electrical Engineering Course OverviewDocumento18 páginasEE213 Applied Electrical Engineering Course OverviewElbert VonVerimAinda não há avaliações
- Electromagnetic Theory EssentialsDocumento10 páginasElectromagnetic Theory EssentialsYerramsetty SreekanthAinda não há avaliações
- Induction heating flat metal by transverse fluxDocumento5 páginasInduction heating flat metal by transverse fluxAnonymous hQ0bP5Fg8IAinda não há avaliações
- Chapter 1 NMR TheoryDocumento63 páginasChapter 1 NMR TheoryabhiAinda não há avaliações
- Review Notes For RT10Documento16 páginasReview Notes For RT10Daniel MontesAinda não há avaliações
- Faraday's Law and Lenz's Law: Physics 1304: Lecture 13, PG 1Documento32 páginasFaraday's Law and Lenz's Law: Physics 1304: Lecture 13, PG 1born2engineerAinda não há avaliações
- Physics Formula ListDocumento8 páginasPhysics Formula ListShaba DingAinda não há avaliações
- Gagan - DV INP-36Documento69 páginasGagan - DV INP-36atul pandeyAinda não há avaliações
- EMF QUESTION BANK FOR ELECTROMAGNETIC FIELDSDocumento7 páginasEMF QUESTION BANK FOR ELECTROMAGNETIC FIELDSshubhamsouravAinda não há avaliações
- Installation, Testing, Commissioning and Maintenance of Heavy Electrical EquipmentDocumento6 páginasInstallation, Testing, Commissioning and Maintenance of Heavy Electrical EquipmentRavi Nagar 47Ainda não há avaliações
- SCI - PHY - Module Handbook - PHY002 - AY21-22 S2Documento12 páginasSCI - PHY - Module Handbook - PHY002 - AY21-22 S2Lu HaoyuAinda não há avaliações
- Vaibhav Project FinalDocumento23 páginasVaibhav Project Finalaroracreation4Ainda não há avaliações
- Generator Construction, Opn N Cooling SystemDocumento187 páginasGenerator Construction, Opn N Cooling SystemHelal RahmanAinda não há avaliações
- Ignition System Components and Operation ChapterDocumento41 páginasIgnition System Components and Operation Chaptersweetu_adit_eeAinda não há avaliações
- SMK Methodist Ayer Tawar Perak Scheme of Work Form 5 Physics YEAR 2020Documento22 páginasSMK Methodist Ayer Tawar Perak Scheme of Work Form 5 Physics YEAR 2020khalilAinda não há avaliações
- PPT-1 Measuring Instruments Unit-1Documento21 páginasPPT-1 Measuring Instruments Unit-1akankshame422Ainda não há avaliações
- Basic Elec Engg (Common)Documento8 páginasBasic Elec Engg (Common)Sachi MensiAinda não há avaliações
- Final ExamDocumento8 páginasFinal ExamykAinda não há avaliações
- Substation Report 1Documento42 páginasSubstation Report 1allamani22525% (4)
- Working Principle of TransformerDocumento4 páginasWorking Principle of TransformerMylz MendozaAinda não há avaliações
- Namma Kalvi 12th Physics Important Questions em 216618Documento10 páginasNamma Kalvi 12th Physics Important Questions em 216618rameshjeya971Ainda não há avaliações