Você também pode gostar
- Manejo de Residuos Sólidos en CuencaDocumento13 páginasManejo de Residuos Sólidos en CuencaAdri MoteritaAinda não há avaliações
- Método CientíficoDocumento38 páginasMétodo CientíficoRafael Flores GonzálezAinda não há avaliações
- Sistemas de ControlDocumento36 páginasSistemas de ControlRafael Flores GonzálezAinda não há avaliações
- Biomecanica 1Documento43 páginasBiomecanica 1Rafael Flores GonzálezAinda não há avaliações
- Procesos TermodinamicosDocumento16 páginasProcesos TermodinamicosRafael Flores GonzálezAinda não há avaliações
- Analisis de Fluido Parte 1Documento37 páginasAnalisis de Fluido Parte 1Rafael Flores GonzálezAinda não há avaliações
- Unidad 1 - Introduccion A La Robotica Parte 2Documento67 páginasUnidad 1 - Introduccion A La Robotica Parte 2Rafael Flores GonzálezAinda não há avaliações
- U1 1Documento41 páginasU1 1Rafael Flores GonzálezAinda não há avaliações
- Unidad 1 Parte 2Documento67 páginasUnidad 1 Parte 2Rafael Flores GonzálezAinda não há avaliações
- Fundamentos de TermodinamicaDocumento30 páginasFundamentos de TermodinamicaRafael Flores GonzálezAinda não há avaliações
- Verificacion de EngranesDocumento19 páginasVerificacion de EngranesRafael Flores GonzálezAinda não há avaliações
- Complemento - Vocabulario Ingles Por Categorias 1200 PalabrasDocumento20 páginasComplemento - Vocabulario Ingles Por Categorias 1200 Palabras20santiago11Ainda não há avaliações
- Equipo 11Documento17 páginasEquipo 11Rafael Flores GonzálezAinda não há avaliações
- Sol Semana 1 PDFDocumento6 páginasSol Semana 1 PDFJoelAinda não há avaliações
- Trabajo Final - Sensores de InvernaderoDocumento34 páginasTrabajo Final - Sensores de InvernaderoENIC-AITCGAinda não há avaliações
- Catálogo de Texturas ÍgneasDocumento15 páginasCatálogo de Texturas ÍgneasFranco Galarce ArenasAinda não há avaliações
- Diseño de Una Máquina Ensambladora de Celosías de RefrigeraciónDocumento23 páginasDiseño de Una Máquina Ensambladora de Celosías de RefrigeraciónMateo Suescun GaleanoAinda não há avaliações
- 3 0Documento139 páginas3 0robsandanAinda não há avaliações
- Tipos y Características de Las ArmadurasDocumento9 páginasTipos y Características de Las Armadurassamir0504Ainda não há avaliações
- Consulta Polvos CeramicosDocumento8 páginasConsulta Polvos CeramicosCamila PáezAinda não há avaliações
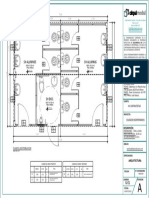
- G - SSHH 01 - PlantaDocumento1 páginaG - SSHH 01 - PlantaRaúl Manuel Espinoza RetamozoAinda não há avaliações
- Evaluacion Cargo OperarioDocumento9 páginasEvaluacion Cargo OperarioEdwin Alfonso Gonzalez EscobarAinda não há avaliações
- Diseno de Pozos de Aguas Subterraneas 2018 IIDocumento28 páginasDiseno de Pozos de Aguas Subterraneas 2018 IILuis A CasimiroAinda não há avaliações
- Proyecto de ElectricidadDocumento19 páginasProyecto de ElectricidadJulio RCAinda não há avaliações
- Diseño y Construccion de CapacitoresDocumento5 páginasDiseño y Construccion de CapacitoresUsuarioAinda não há avaliações
- Principio de Arquimedes PDFDocumento2 páginasPrincipio de Arquimedes PDFYessica CardenasAinda não há avaliações
- Preguntas Propuestas Esfuerzos PDFDocumento3 páginasPreguntas Propuestas Esfuerzos PDFLuz VillacortaAinda não há avaliações
- DrywallDocumento5 páginasDrywallfdiaz12Ainda não há avaliações
- Rombo de SeguridadDocumento8 páginasRombo de SeguridadGerman JuarezAinda não há avaliações
- Turbo ElectronicoDocumento13 páginasTurbo Electronicorobyn100Ainda não há avaliações
- Aceites CATDocumento238 páginasAceites CATcarlos100% (2)
- Columna Estratigrafica Z2 SR 51107 1Documento1 páginaColumna Estratigrafica Z2 SR 51107 1jorgeAinda não há avaliações
- Brochure l150h l180h l220h t3 Es A6 20055439 CDocumento28 páginasBrochure l150h l180h l220h t3 Es A6 20055439 CRoni WayraAinda não há avaliações
- Central HidroeléctricaDocumento3 páginasCentral HidroeléctricaMiguelulaAinda não há avaliações
- 9.2.2.6 Lab - Configuring Dynamic and Static NATDocumento9 páginas9.2.2.6 Lab - Configuring Dynamic and Static NATJosselyne Fonseca0% (1)
- Tabla de Precios Referenciales - Región Del Bio Bio 2022 Con Zonificación.Documento13 páginasTabla de Precios Referenciales - Región Del Bio Bio 2022 Con Zonificación.EMPRESA CONSTRUCTORA R&JAinda não há avaliações
- PT003-Instalacion de Faena Rev.0Documento28 páginasPT003-Instalacion de Faena Rev.0franciscoAinda não há avaliações
- Cinytec PreciosDocumento2 páginasCinytec PreciosAixa RossiAinda não há avaliações
- Resane de PlanchasDocumento6 páginasResane de Planchasfreddy.sucuytanaAinda não há avaliações
- 1er EXAMEN METALURGIA FÍSICA IIDocumento7 páginas1er EXAMEN METALURGIA FÍSICA IIYola HolgadoAinda não há avaliações
- Superflex-EVA 3x120 +1x70 mm2 1kV Rev 3Documento2 páginasSuperflex-EVA 3x120 +1x70 mm2 1kV Rev 3Roberto Daniel Jimenez EspejoAinda não há avaliações
- Generalidades de La MaderaDocumento55 páginasGeneralidades de La MaderaRoberto Carlos Cornejo PalominoAinda não há avaliações