Você também pode gostar
- CISCO PACKET TRACER LABS: Best practice of configuring or troubleshooting NetworkNo EverandCISCO PACKET TRACER LABS: Best practice of configuring or troubleshooting NetworkAinda não há avaliações
- EmsysDocumento29 páginasEmsysveenadivyakishAinda não há avaliações
- Practical Reverse Engineering: x86, x64, ARM, Windows Kernel, Reversing Tools, and ObfuscationNo EverandPractical Reverse Engineering: x86, x64, ARM, Windows Kernel, Reversing Tools, and ObfuscationAinda não há avaliações
- ARM RTX Real-Time Operating SystemDocumento67 páginasARM RTX Real-Time Operating SystemLauren LoveAinda não há avaliações
- Multicore DSP: From Algorithms to Real-time Implementation on the TMS320C66x SoCNo EverandMulticore DSP: From Algorithms to Real-time Implementation on the TMS320C66x SoCAinda não há avaliações
- Unit-I Basic Computer OrganizationDocumento68 páginasUnit-I Basic Computer OrganizationSubathra Devi MourouganeAinda não há avaliações
- EE4800-03 Embedded Systems Design: Lessons 7-10 - Exceptions - Resets and InterruptsDocumento26 páginasEE4800-03 Embedded Systems Design: Lessons 7-10 - Exceptions - Resets and InterruptsfiversAinda não há avaliações
- On Using Tasklets': An Example of The Linux Kernel's Tasklet' Mechanism For Deferring Some Interrupt-Handling WorkDocumento21 páginasOn Using Tasklets': An Example of The Linux Kernel's Tasklet' Mechanism For Deferring Some Interrupt-Handling Workggsdm sngs mmtAinda não há avaliações
- 3-FPGA Logic PDFDocumento36 páginas3-FPGA Logic PDFJuan David MurilloAinda não há avaliações
- Practical Data Acquisition for Instrumentation and Control SystemsNo EverandPractical Data Acquisition for Instrumentation and Control SystemsAinda não há avaliações
- Unit 4Documento26 páginasUnit 4Dr. M V GANESWARA RAOAinda não há avaliações
- Lecture 2: Implementation Alternatives & Concurrent Programming Implementation AlternativesDocumento8 páginasLecture 2: Implementation Alternatives & Concurrent Programming Implementation Alternativespkrsuresh2013Ainda não há avaliações
- WAN TECHNOLOGY FRAME-RELAY: An Expert's Handbook of Navigating Frame Relay NetworksNo EverandWAN TECHNOLOGY FRAME-RELAY: An Expert's Handbook of Navigating Frame Relay NetworksAinda não há avaliações
- STADocumento123 páginasSTAMoon Sadia DiptheeAinda não há avaliações
- Network with Practical Labs Configuration: Step by Step configuration of Router and Switch configurationNo EverandNetwork with Practical Labs Configuration: Step by Step configuration of Router and Switch configurationAinda não há avaliações
- Computer Organization and Assembly Language: Lecture 2 - x86 Processor ArchitectureDocumento23 páginasComputer Organization and Assembly Language: Lecture 2 - x86 Processor ArchitectureNosreffejDelRosarioAinda não há avaliações
- Introduction to 6800/6802 Microprocessor Systems: Hardware, Software and ExperimentationNo EverandIntroduction to 6800/6802 Microprocessor Systems: Hardware, Software and ExperimentationAinda não há avaliações
- Emulation - InterpretationDocumento63 páginasEmulation - InterpretationVasanthi SenthilAinda não há avaliações
- Modern C++ Programming: Including the recent standards C++11, C++17, C++20, C++23No EverandModern C++ Programming: Including the recent standards C++11, C++17, C++20, C++23Ainda não há avaliações
- Lundhild-Understanding RAC InternalsDocumento31 páginasLundhild-Understanding RAC Internalsrajiv272799Ainda não há avaliações
- PLC: Programmable Logic Controller – Arktika.: EXPERIMENTAL PRODUCT BASED ON CPLD.No EverandPLC: Programmable Logic Controller – Arktika.: EXPERIMENTAL PRODUCT BASED ON CPLD.Ainda não há avaliações
- STA Prime TimeDocumento125 páginasSTA Prime TimeNishanth GowdaAinda não há avaliações
- Unit - 4 & 5Documento86 páginasUnit - 4 & 5Chaturya DoddiAinda não há avaliações
- Embedded C ProgrammingDocumento57 páginasEmbedded C ProgrammingPhạm Đức Sáng100% (1)
- Introduction To The Linux KernelDocumento51 páginasIntroduction To The Linux Kernelbharath_mv7-1Ainda não há avaliações
- CCNA Fast Track 802.ppsDocumento41 páginasCCNA Fast Track 802.ppsakocmackyAinda não há avaliações
- VHDL Come Strumento Di Progettazione Per Circuiti Digitali VLSIDocumento23 páginasVHDL Come Strumento Di Progettazione Per Circuiti Digitali VLSIunibfeAinda não há avaliações
- Isa 1Documento13 páginasIsa 1awais_alii56Ainda não há avaliações
- RTOS Introduction: E-Bridge TechnologiesDocumento62 páginasRTOS Introduction: E-Bridge TechnologiesnagrajAinda não há avaliações
- Mainframes RefresherDocumento289 páginasMainframes RefreshervgrynyukAinda não há avaliações
- Ucos Ii: BY: MeetDocumento26 páginasUcos Ii: BY: MeetmeetbshahAinda não há avaliações
- Embedded Systems Ch-4Documento35 páginasEmbedded Systems Ch-4NatyBAinda não há avaliações
- Introduction To The Digital Flow in Mixed Environment (2 - Back End)Documento89 páginasIntroduction To The Digital Flow in Mixed Environment (2 - Back End)Nguyen Van ToanAinda não há avaliações
- S, R Are All STD - LogicDocumento7 páginasS, R Are All STD - LogicMuhammad Moin100% (1)
- TRADITIONAL Asic Design FlowDocumento24 páginasTRADITIONAL Asic Design FlowTarun Prasad100% (1)
- Unit - I Syllabus: Basic Structure of ComputersDocumento72 páginasUnit - I Syllabus: Basic Structure of ComputersamssultanaAinda não há avaliações
- Assignment 4: Course Instructor / Lab EngineerDocumento8 páginasAssignment 4: Course Instructor / Lab EngineerNitasha HumaAinda não há avaliações
- 2marks MC FullDocumento15 páginas2marks MC FullSid VibhorAinda não há avaliações
- Sta 9 1Documento125 páginasSta 9 1Jayaprakash Polimetla100% (1)
- 6500 Part 4Documento57 páginas6500 Part 4Ratnesh KumarAinda não há avaliações
- BRKARC 1008 Intro Ios XRDocumento125 páginasBRKARC 1008 Intro Ios XRkds20850100% (1)
- Kim 2Documento4 páginasKim 2kimjameAinda não há avaliações
- DFT ProtocolDocumento33 páginasDFT Protocolnoor_dcetAinda não há avaliações
- Process (Or Task)Documento20 páginasProcess (Or Task)Monu ChouhanAinda não há avaliações
- Rtos Faq VectorDocumento56 páginasRtos Faq Vectorprashant goreAinda não há avaliações
- Synthesizable VHDL Slides AyonDocumento39 páginasSynthesizable VHDL Slides AyonSreeja DasAinda não há avaliações
- Elements of Processor Management: CIS 250 Operating SystemsDocumento36 páginasElements of Processor Management: CIS 250 Operating SystemsAsawari SurveAinda não há avaliações
- Lacture 6Documento44 páginasLacture 6Ali KhanAinda não há avaliações
- Routerbricks: Scaling Software Routers With Modern ServersDocumento51 páginasRouterbricks: Scaling Software Routers With Modern ServersCristi TohaneanAinda não há avaliações
- SLC Examples Application Manual: 3150-MCM Example Ladder LogicDocumento24 páginasSLC Examples Application Manual: 3150-MCM Example Ladder LogicVÕ QUỐC HIỆUAinda não há avaliações
- EE (CE) 6304 Computer Architecture Lecture #2 (8/28/13)Documento35 páginasEE (CE) 6304 Computer Architecture Lecture #2 (8/28/13)Vishal MehtaAinda não há avaliações
- Mainframe RefresherDocumento285 páginasMainframe Refresherbpks_0132912100% (4)
- Arhitectura CalculatoarelorDocumento22 páginasArhitectura CalculatoarelormiryangelAinda não há avaliações
- Undocumented LTspice - LTwiki-Wiki For LTspiceDocumento16 páginasUndocumented LTspice - LTwiki-Wiki For LTspiceoctavinavarro8236Ainda não há avaliações
- UNIX OS Observability ToolsDocumento37 páginasUNIX OS Observability Toolsimranpathan22Ainda não há avaliações
- Assembly Programming BasicsDocumento46 páginasAssembly Programming BasicsHarsh KaushalyaAinda não há avaliações
- Curriculum Assessment For Professional AccreditationDocumento12 páginasCurriculum Assessment For Professional AccreditationKevin_IAinda não há avaliações
- Microwave Backhaul Solutions - Sentinel BrochureDocumento8 páginasMicrowave Backhaul Solutions - Sentinel BrochureKevin_IAinda não há avaliações
- Skills and Knowledge CompetencyDocumento9 páginasSkills and Knowledge CompetencyKevin_IAinda não há avaliações
- Conditions For Employee Learning and InnovationDocumento19 páginasConditions For Employee Learning and InnovationKevin_IAinda não há avaliações
- Steel MW Apps Catalog-Structural Support SolutionsDocumento44 páginasSteel MW Apps Catalog-Structural Support SolutionsKevin_IAinda não há avaliações
- Total Productive Maintenance (TPM) Implementation Practice: A Literature Review and DirectionsDocumento31 páginasTotal Productive Maintenance (TPM) Implementation Practice: A Literature Review and DirectionsKevin_IAinda não há avaliações
- Statistical Process Control and CBMDocumento17 páginasStatistical Process Control and CBMKevin_IAinda não há avaliações
- Aviat Quick Start Guide For Indoor Equipment GroundingDocumento20 páginasAviat Quick Start Guide For Indoor Equipment GroundingKevin_IAinda não há avaliações
- The Need For Speed - Best Practices For Building Ultra-Low Latency Microwave NetworksDocumento8 páginasThe Need For Speed - Best Practices For Building Ultra-Low Latency Microwave NetworksKevin_IAinda não há avaliações
- Digital Microwave Link Engineering - IV - Protection Schemes and Diversity ArrangementsDocumento14 páginasDigital Microwave Link Engineering - IV - Protection Schemes and Diversity ArrangementsKevin_IAinda não há avaliações
- Installation Instructions For Eclipse ODU Coupler UnitDocumento2 páginasInstallation Instructions For Eclipse ODU Coupler UnitKevin_IAinda não há avaliações
- Installation Instruction For Eclipse XPOL Direct MountDocumento2 páginasInstallation Instruction For Eclipse XPOL Direct MountKevin_IAinda não há avaliações
- Why IP - MPLS - 20feb2016Documento2 páginasWhy IP - MPLS - 20feb2016Kevin_IAinda não há avaliações
- Digital Microwave Link Engineering - V - Interference Mechanisms and In-Service MeasurementsDocumento13 páginasDigital Microwave Link Engineering - V - Interference Mechanisms and In-Service MeasurementsKevin_IAinda não há avaliações
- Microwave Path Availability and Error Performance - What Is The DifferenceDocumento4 páginasMicrowave Path Availability and Error Performance - What Is The DifferenceKevin_IAinda não há avaliações
- Logic Solver For Overpressure Protection White Paper Moore IndustriesDocumento14 páginasLogic Solver For Overpressure Protection White Paper Moore IndustriesKevin_IAinda não há avaliações
- Fade Margin System GainDocumento3 páginasFade Margin System GainRenn CruzAinda não há avaliações
- Digital Microwave Link Engineering - II - Performance Predictions and Path CalculationsDocumento9 páginasDigital Microwave Link Engineering - II - Performance Predictions and Path CalculationsKevin_IAinda não há avaliações
- Outage Points - Availability - and Performance Objectives in Digital Microwave Radio-Relay LinksDocumento3 páginasOutage Points - Availability - and Performance Objectives in Digital Microwave Radio-Relay LinksKevin_IAinda não há avaliações
- Latency and Short-Term Outage in Digital Microwave LinksDocumento3 páginasLatency and Short-Term Outage in Digital Microwave LinksKevin_IAinda não há avaliações
- Pneumatics Practical Guide PDFDocumento60 páginasPneumatics Practical Guide PDFJavier Vasquez LopezAinda não há avaliações
- Autodesk Safety Wp004Documento16 páginasAutodesk Safety Wp004dfbrittoAinda não há avaliações
- The Leaders Guide 3 Key Steps To Effective Change ManagementDocumento16 páginasThe Leaders Guide 3 Key Steps To Effective Change ManagementKevin_IAinda não há avaliações
- 1 Advanced Challenges With Real Time SystemsDocumento30 páginas1 Advanced Challenges With Real Time SystemsKevin_IAinda não há avaliações
- "Hell A Top, Hell A Bottom Hallelujah in The Middle": Sweet Potato PuddingDocumento1 página"Hell A Top, Hell A Bottom Hallelujah in The Middle": Sweet Potato PuddingKevin_IAinda não há avaliações
- Microprocessors, Advanced: Partitioning An Embedded System For Multicore DesignDocumento36 páginasMicroprocessors, Advanced: Partitioning An Embedded System For Multicore DesignKevin_IAinda não há avaliações
- Altera DspbookDocumento8 páginasAltera DspbookGopal Balakrishnan IyerAinda não há avaliações
- Jamaican Cuisine Collectors EditionDocumento48 páginasJamaican Cuisine Collectors EditionKevin_I80% (5)
- Making Accurate Measurements of GDDR5 Memory SystemsDocumento7 páginasMaking Accurate Measurements of GDDR5 Memory SystemsKevin_IAinda não há avaliações
- Quick Guide To Download and Install Canon Printer Driver From Canon - ComijsetupDocumento2 páginasQuick Guide To Download and Install Canon Printer Driver From Canon - ComijsetupComIJSetupAinda não há avaliações
- Atmega 8 Connection To 74HC595: Circuit DiagramDocumento3 páginasAtmega 8 Connection To 74HC595: Circuit DiagramRuhollah PurbafraniAinda não há avaliações
- Arm Microcontroller Projects EbookDocumento306 páginasArm Microcontroller Projects Ebookfenix1233100% (2)
- C Zone 5Documento2 páginasC Zone 5Victor TengAinda não há avaliações
- EEPROM Emulation Driver For M68HC908 Microcontrollers, Rev. 0 PDFDocumento47 páginasEEPROM Emulation Driver For M68HC908 Microcontrollers, Rev. 0 PDFDaniel Alexander Torres RodríguezAinda não há avaliações
- Prueba Ingles TeleperformanceDocumento2 páginasPrueba Ingles TeleperformanceJCesar BenitezAinda não há avaliações
- Computer Motherboard I. Computer Motherboard: Property of STIDocumento4 páginasComputer Motherboard I. Computer Motherboard: Property of STIRachelle GandaAinda não há avaliações
- HP Prodesk 400 G4 Desktop Mini: Support and Service ConsiderationsDocumento20 páginasHP Prodesk 400 G4 Desktop Mini: Support and Service ConsiderationsfdelizAinda não há avaliações
- Acs Tech90Documento191 páginasAcs Tech90ramjoce100% (1)
- 02 - Components of The System Unit PDFDocumento59 páginas02 - Components of The System Unit PDFJohn Michael ÜyAinda não há avaliações
- Project Procurement Management Plan (PPMP) Cy 2020: End-User/Unit: Salvacion National High SchoolDocumento1 páginaProject Procurement Management Plan (PPMP) Cy 2020: End-User/Unit: Salvacion National High SchoolMaricel Bigonte ManlupigAinda não há avaliações
- HP E87650 Service ManualDocumento3.212 páginasHP E87650 Service ManualKārlis SpreslisAinda não há avaliações
- CPS Module1 Notes by Chidanand S Kusur CSE DeptDocumento19 páginasCPS Module1 Notes by Chidanand S Kusur CSE DeptShariqa FatimaAinda não há avaliações
- Complete Notes System SoftwareDocumento49 páginasComplete Notes System SoftwareManikandanAinda não há avaliações
- Toshiba 42hl833g PDFDocumento37 páginasToshiba 42hl833g PDFCarlos GonçalvesAinda não há avaliações
- Cortex - M3: Technical Reference ManualDocumento133 páginasCortex - M3: Technical Reference ManualDuc Huy LeAinda não há avaliações
- LASERJET 1150, 1300 Service ManualDocumento222 páginasLASERJET 1150, 1300 Service ManualBobby100% (9)
- Microwave Oven 1Documento22 páginasMicrowave Oven 1Praveen J L100% (1)
- Virtualization - Using Logical Domains (Ldom) : HypervisorDocumento7 páginasVirtualization - Using Logical Domains (Ldom) : HypervisorTapan HazraAinda não há avaliações
- Soc 7Documento8 páginasSoc 7Towfeeq MohammedAinda não há avaliações
- Supported Display Modules & TFT ControllersDocumento4 páginasSupported Display Modules & TFT ControllersSCIFITECHAinda não há avaliações
- VHD WimbootDocumento6 páginasVHD Wimbootmojocell7100% (1)
- Intimus Paper Shredder BrochureDocumento6 páginasIntimus Paper Shredder Brochurepanthertech_trading428Ainda não há avaliações
- MPASM OperationDocumento2 páginasMPASM Operationmicrofun100% (2)
- Gpu VirtualisationDocumento14 páginasGpu Virtualisationkumar53366Ainda não há avaliações
- Parts and Functions of The MotherboardDocumento3 páginasParts and Functions of The MotherboardKurk DaugdaugAinda não há avaliações
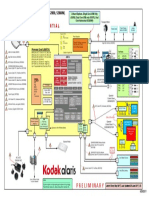
- S 205060 W 7080 Wservicesysteminterconnectdiagramprelimv 228 Jun 171628381144100Documento1 páginaS 205060 W 7080 Wservicesysteminterconnectdiagramprelimv 228 Jun 171628381144100estiven zapata garciaAinda não há avaliações
- Future of Computer ArchitectureDocumento46 páginasFuture of Computer ArchitecturemeerashekarAinda não há avaliações
- Level Time To Create 15 Hour: Assembly Scheme: 3 Sheet Template: 11 Sheets (58 Parts)Documento16 páginasLevel Time To Create 15 Hour: Assembly Scheme: 3 Sheet Template: 11 Sheets (58 Parts)Adan Martin Dzib TunAinda não há avaliações
- AMD Ryzen 5 5600 Vs Ryzen 5 3600 - Performance ComparisonDocumento7 páginasAMD Ryzen 5 5600 Vs Ryzen 5 3600 - Performance Comparisonseptyaandi.cboAinda não há avaliações