Você também pode gostar
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceNo EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceNota: 4 de 5 estrelas4/5 (895)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeNo EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeNota: 4 de 5 estrelas4/5 (5794)
- Algorithm Design & Data StructuresDocumento13 páginasAlgorithm Design & Data StructuresPrahlad Kumar SharmaAinda não há avaliações
- Siemens Training - Tata TechnologiesDocumento3 páginasSiemens Training - Tata Technologieshimanshuchawla654Ainda não há avaliações
- DBMSDocumento26 páginasDBMShimanshuchawla654Ainda não há avaliações
- ChawlaDocumento3 páginasChawlahimanshuchawla654Ainda não há avaliações
- 12BME1159 Himanshu Chandigarh University Mechanical Mechanical Subjects and Autocad, Solidworks, C 77.4Documento2 páginas12BME1159 Himanshu Chandigarh University Mechanical Mechanical Subjects and Autocad, Solidworks, C 77.4himanshuchawla654Ainda não há avaliações
- 12BME1159 (CL Educate LTD.)Documento2 páginas12BME1159 (CL Educate LTD.)himanshuchawla654Ainda não há avaliações
- Chandigarh Group of Colleges Final List 5Documento136 páginasChandigarh Group of Colleges Final List 5himanshuchawla654Ainda não há avaliações
- Cement and RefractoriesDocumento24 páginasCement and Refractorieshimanshuchawla654Ainda não há avaliações
- WaterDocumento40 páginasWaterhimanshuchawla654Ainda não há avaliações
- Setup L2TP - IPsec VPN Server On SoftEther VPN Server - SoftEther VPN ProjectDocumento4 páginasSetup L2TP - IPsec VPN Server On SoftEther VPN Server - SoftEther VPN Projecthimanshuchawla654Ainda não há avaliações
- Applied Chemistry (Non IT)Documento5 páginasApplied Chemistry (Non IT)himanshuchawla654Ainda não há avaliações
- 4521 Datesheet August-2015Documento10 páginas4521 Datesheet August-2015himanshuchawla654Ainda não há avaliações
- NSDCDocumento73 páginasNSDChimanshuchawla654Ainda não há avaliações
- Data Base Name-Ranjeet Singh Class - 4B UID - 14BCS1366Documento6 páginasData Base Name-Ranjeet Singh Class - 4B UID - 14BCS1366himanshuchawla654Ainda não há avaliações
- 4362 Pracs DAte Sheet FinalDocumento5 páginas4362 Pracs DAte Sheet Finalhimanshuchawla654Ainda não há avaliações
- 4368 Datesheet May 2015 Jagga Amit 2Documento56 páginas4368 Datesheet May 2015 Jagga Amit 2himanshuchawla654Ainda não há avaliações
- Techniques of Biotechnology Mcclean GoodDocumento53 páginasTechniques of Biotechnology Mcclean Goodhimanshuchawla654100% (1)
- Engineering AnthropometryDocumento8 páginasEngineering Anthropometryhimanshuchawla654Ainda não há avaliações
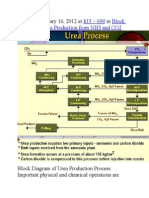
- Published January 16, 2012 at In: 813 × 699 Block Diagram of Urea Production From NH3 and CO2Documento9 páginasPublished January 16, 2012 at In: 813 × 699 Block Diagram of Urea Production From NH3 and CO2himanshuchawla654Ainda não há avaliações
- The FOA Reference For Fiber Optics - OTDRsDocumento13 páginasThe FOA Reference For Fiber Optics - OTDRshimanshuchawla654100% (1)
- Bibliography PDFDocumento4 páginasBibliography PDFhimanshuchawla654Ainda não há avaliações
- The Yellow House: A Memoir (2019 National Book Award Winner)No EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Nota: 4 de 5 estrelas4/5 (98)
- The Little Book of Hygge: Danish Secrets to Happy LivingNo EverandThe Little Book of Hygge: Danish Secrets to Happy LivingNota: 3.5 de 5 estrelas3.5/5 (400)
- Never Split the Difference: Negotiating As If Your Life Depended On ItNo EverandNever Split the Difference: Negotiating As If Your Life Depended On ItNota: 4.5 de 5 estrelas4.5/5 (838)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureNo EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureNota: 4.5 de 5 estrelas4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryNo EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryNota: 3.5 de 5 estrelas3.5/5 (231)
- The Emperor of All Maladies: A Biography of CancerNo EverandThe Emperor of All Maladies: A Biography of CancerNota: 4.5 de 5 estrelas4.5/5 (271)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaNo EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaNota: 4.5 de 5 estrelas4.5/5 (266)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersNo EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersNota: 4.5 de 5 estrelas4.5/5 (345)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyNo EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyNota: 3.5 de 5 estrelas3.5/5 (2259)
- Team of Rivals: The Political Genius of Abraham LincolnNo EverandTeam of Rivals: The Political Genius of Abraham LincolnNota: 4.5 de 5 estrelas4.5/5 (234)
- The Unwinding: An Inner History of the New AmericaNo EverandThe Unwinding: An Inner History of the New AmericaNota: 4 de 5 estrelas4/5 (45)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreNo EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreNota: 4 de 5 estrelas4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)No EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Nota: 4.5 de 5 estrelas4.5/5 (121)
- G9 MATHS P2 (28 Copies)Documento9 páginasG9 MATHS P2 (28 Copies)Straight As StudyAinda não há avaliações
- VIT Bhopal University: Practical File Fall 2020-2021Documento51 páginasVIT Bhopal University: Practical File Fall 2020-2021Kunal ChandraAinda não há avaliações
- 05 eLMS Activity 1 - Seatwork Prefinal Arnold C Planas DSPDocumento2 páginas05 eLMS Activity 1 - Seatwork Prefinal Arnold C Planas DSPDummmy AccountttAinda não há avaliações
- Summer Homework 3rd GradeDocumento4 páginasSummer Homework 3rd Gradeafmoczaee100% (1)
- 1 AlgebraDocumento48 páginas1 AlgebraDiana Perez100% (1)
- Introduction To Decimals PDFDocumento7 páginasIntroduction To Decimals PDFPeaceandLove Keisha RoldanAinda não há avaliações
- Some Rules To Perform Logical Proofs: Modus PonensDocumento41 páginasSome Rules To Perform Logical Proofs: Modus PonensKrishnanunni K NairAinda não há avaliações
- 2303 08628 PDFDocumento11 páginas2303 08628 PDFTa BarAinda não há avaliações
- Sri Ramachandra School, Jangareddigudem Formative Assessment-I MathematicsDocumento3 páginasSri Ramachandra School, Jangareddigudem Formative Assessment-I MathematicsRamesh Babu KommuAinda não há avaliações
- Lab 2Documento8 páginasLab 2Laraib shahzadAinda não há avaliações
- Discrete Structures, Logic, and Computability: Student Study GuideDocumento161 páginasDiscrete Structures, Logic, and Computability: Student Study GuideluminenttAinda não há avaliações
- Set-1 Sec-BDocumento5 páginasSet-1 Sec-Bapi-19808758Ainda não há avaliações
- Module 2: Resultant of Any Force SystemDocumento9 páginasModule 2: Resultant of Any Force SystemVINCE VITRIOLOAinda não há avaliações
- Fuzzy LogicDocumento40 páginasFuzzy LogicSourabh123456789Ainda não há avaliações
- Higher-Order DerivativesDocumento3 páginasHigher-Order DerivativesStevenzel Eala EstellaAinda não há avaliações
- Multiple-Choice Test Nonlinear Regression Regression: Complete Solution SetDocumento12 páginasMultiple-Choice Test Nonlinear Regression Regression: Complete Solution SetPankaj KaleAinda não há avaliações
- 7 Larson SolDocumento108 páginas7 Larson SolCrisAinda não há avaliações
- Module 4: Short QuestionsDocumento2 páginasModule 4: Short QuestionscaptainhassAinda não há avaliações
- 1745806749maths Class Ix Periodic Test II Exam Sample Paper 02Documento5 páginas1745806749maths Class Ix Periodic Test II Exam Sample Paper 02AdtAinda não há avaliações
- Selection Sort and Insertion SortDocumento5 páginasSelection Sort and Insertion SortcertifiedCrazyOZ HemaAinda não há avaliações
- Name - Discovering TrigDocumento3 páginasName - Discovering Trigshirleydavid82Ainda não há avaliações
- Material To Lecture 3Documento6 páginasMaterial To Lecture 3Данила ДенисовAinda não há avaliações
- MAT 3633 Note 1 Lagrange Interpolation: 1.1 The Lagrange Interpolating PolynomialDocumento16 páginasMAT 3633 Note 1 Lagrange Interpolation: 1.1 The Lagrange Interpolating PolynomialKuhu KoyaliyaAinda não há avaliações
- Strategic Intervention Material - Linear and Quadratic FunctionsDocumento3 páginasStrategic Intervention Material - Linear and Quadratic FunctionsApril Gonzales80% (10)
- Yao D.D., Zheng S.-Dynamic Control of Quality in Production-Inventory Systems-Springer (2002)Documento229 páginasYao D.D., Zheng S.-Dynamic Control of Quality in Production-Inventory Systems-Springer (2002)Vsauce FansAinda não há avaliações
- Mark Scheme (Results) January 2023: Pearson Edexcel International GCSE in Mathematics A (4MA1) Paper 2HDocumento30 páginasMark Scheme (Results) January 2023: Pearson Edexcel International GCSE in Mathematics A (4MA1) Paper 2HRishona D' SouzaAinda não há avaliações
- SR - Maths Iib - Imp Questions-2024Documento6 páginasSR - Maths Iib - Imp Questions-2024ow123aisAinda não há avaliações
- Exercise Solution 05 Linear ClassificationDocumento9 páginasExercise Solution 05 Linear ClassificationjeyalakshmiAinda não há avaliações
- NLC23 - Grade 7 Enhancement Mathematics Student Workbook - FinalDocumento58 páginasNLC23 - Grade 7 Enhancement Mathematics Student Workbook - FinalJohn Christopher Romero100% (1)
- HW 3Documento3 páginasHW 3Jake SmithAinda não há avaliações