Você também pode gostar
- 10 Flexure in Beams 02Documento21 páginas10 Flexure in Beams 02S. M. ZAHIDUR RAHMAN 1301129Ainda não há avaliações
- Chapter 1 Briefing IntroductionDocumento101 páginasChapter 1 Briefing IntroductionAhmed AsnagAinda não há avaliações
- Group 1 Transportation BSCE3ADocumento68 páginasGroup 1 Transportation BSCE3AKevin SalzalAinda não há avaliações
- Engineering Economics AnalysisDocumento35 páginasEngineering Economics AnalysisisleelisaAinda não há avaliações
- Unit III Cash FlowDocumento31 páginasUnit III Cash Flowanantharaman ashaAinda não há avaliações
- Books 2510 0 PDFDocumento6 páginasBooks 2510 0 PDFDevasya SinghAinda não há avaliações
- Flexure Chapter Reinforced ConcreteDocumento10 páginasFlexure Chapter Reinforced Concretenzb1234Ainda não há avaliações
- E 01 PresentationDocumento17 páginasE 01 PresentationSakhaoat HossainAinda não há avaliações
- Instrumentation and Sensors For CivilDocumento137 páginasInstrumentation and Sensors For CivilKalpesh ShahAinda não há avaliações
- Struc Analysis Chapter 2Documento19 páginasStruc Analysis Chapter 2Kerol Kerol KerolAinda não há avaliações
- Inspection and Measurement of Tooth ThicknessDocumento14 páginasInspection and Measurement of Tooth Thicknessfj_pastor100% (1)
- Business Economics TyDmDmyuyVDocumento269 páginasBusiness Economics TyDmDmyuyVMeraz AhmedAinda não há avaliações
- Introduction To Engineering EconomicsDocumento35 páginasIntroduction To Engineering EconomicsRafiaAinda não há avaliações
- Chapter 2Documento65 páginasChapter 2Rakesh KumarAinda não há avaliações
- CHAPTER 1 Introduction To StaticsDocumento39 páginasCHAPTER 1 Introduction To StaticsDavid MurphyAinda não há avaliações
- National IncomeDocumento34 páginasNational IncomeUday SharmaAinda não há avaliações
- UrbanizationDocumento86 páginasUrbanizationAPARNA SENTHILAinda não há avaliações
- Highway Planning Alignment SEODocumento17 páginasHighway Planning Alignment SEOChockalingamAinda não há avaliações
- Cables and Arches: Civl3310 Structural AnalysisDocumento23 páginasCables and Arches: Civl3310 Structural AnalysisthoriqAinda não há avaliações
- Structural Analysis For HyperloopDocumento22 páginasStructural Analysis For HyperloopRaghav MainiAinda não há avaliações
- 4 SensorsDocumento39 páginas4 SensorsmkpqAinda não há avaliações
- RCC Beam Analysis MethodsDocumento2 páginasRCC Beam Analysis MethodsAjay MalikAinda não há avaliações
- CE6304 Surveying IDocumento12 páginasCE6304 Surveying ISundara MoorthyAinda não há avaliações
- Civil Engineering Course Content and Mechanics ProblemsDocumento17 páginasCivil Engineering Course Content and Mechanics ProblemsKhalid YousafAinda não há avaliações
- MG 2451-Engineering Economics and Cost AnalysisDocumento3 páginasMG 2451-Engineering Economics and Cost AnalysisRajendira Prasad100% (1)
- Structural Dynamics Lecture OverviewDocumento36 páginasStructural Dynamics Lecture OverviewPurawin Subramaniam0% (1)
- FFODocumento31 páginasFFOBhakti Mahbubani0% (1)
- Laboratory Manual - P1Documento10 páginasLaboratory Manual - P1Bhushan RaisinghaniAinda não há avaliações
- MRTSDocumento18 páginasMRTSShobhit AcharyaAinda não há avaliações
- Leveling 1Documento51 páginasLeveling 1ClarenceNyembaAinda não há avaliações
- Circular Curves: Key Elements and FormulasDocumento40 páginasCircular Curves: Key Elements and FormulasLakshmipathi GAinda não há avaliações
- Fluid Mechanics - Lecture Notes - Unit 4Documento71 páginasFluid Mechanics - Lecture Notes - Unit 4Mohan Prasad.MAinda não há avaliações
- Re Aastu PP 2Documento46 páginasRe Aastu PP 2ellocster21Ainda não há avaliações
- 1.3 Chain Survey ProcedureDocumento22 páginas1.3 Chain Survey Proceduremahfuz kamal100% (2)
- 03-Hydrostatics Hydrokinematics HydrodynamicsDocumento30 páginas03-Hydrostatics Hydrokinematics HydrodynamicsSarmad KhanAinda não há avaliações
- Isro Admit CardDocumento2 páginasIsro Admit CardAnchal GoheAinda não há avaliações
- Mechanics of Materials 6th Ed - RC Hibbler - Solution ManualDocumento43 páginasMechanics of Materials 6th Ed - RC Hibbler - Solution ManualĐặng Phi LongAinda não há avaliações
- Lecture 14Documento23 páginasLecture 14Ch Muhammad YousufAinda não há avaliações
- Leveling Height of Colimation MethodDocumento7 páginasLeveling Height of Colimation Methodjoenew2000Ainda não há avaliações
- Tie Columns: Short ColumnDocumento26 páginasTie Columns: Short ColumnEngr.Towhidul IslamAinda não há avaliações
- Measure Distance Between Inaccessible Points Using Prismatic CompassDocumento26 páginasMeasure Distance Between Inaccessible Points Using Prismatic Compassandy_tatte32Ainda não há avaliações
- SURVEYING Lab - 2 PDFDocumento28 páginasSURVEYING Lab - 2 PDFMligo ClemenceAinda não há avaliações
- Structural Engineering PG Lab ManualDocumento47 páginasStructural Engineering PG Lab ManualKannan PAinda não há avaliações
- Analysis of Indeterminate Structures by Force MethodDocumento17 páginasAnalysis of Indeterminate Structures by Force Methodatish k100% (2)
- Calculate Beam Deflections and SlopesDocumento49 páginasCalculate Beam Deflections and Slopes2011kumarAinda não há avaliações
- Non Uniform BendingDocumento11 páginasNon Uniform BendingQuy Huynh100% (1)
- CH 12 Compound - CurveDocumento19 páginasCH 12 Compound - CurveAbdirahman Waasuge100% (1)
- Lecture No. 2 - Three Dimensional Stresses and Strains-: 2-1 GeneralDocumento8 páginasLecture No. 2 - Three Dimensional Stresses and Strains-: 2-1 GeneralAbhinash KumarAinda não há avaliações
- LAB 7: IIR Filter Design ObjectivesDocumento13 páginasLAB 7: IIR Filter Design Objectivesmjrahimi.eee2020Ainda não há avaliações
- Digital Signal Processing: Unit-1 and 2: Discrete Fourier TransformsDocumento5 páginasDigital Signal Processing: Unit-1 and 2: Discrete Fourier TransformsjpsridharAinda não há avaliações
- Digital Signal Processing FIR Filter Design: Marc Moonen Dept. E.E./ESAT, K.U.LeuvenDocumento44 páginasDigital Signal Processing FIR Filter Design: Marc Moonen Dept. E.E./ESAT, K.U.LeuvenHari PillaiAinda não há avaliações
- Design of Infinite Impulse Response (IIR) Digital FiltersDocumento16 páginasDesign of Infinite Impulse Response (IIR) Digital FiltersSedat IsterAinda não há avaliações
- N N C A: Compiled by AH Tan, November 2012Documento6 páginasN N C A: Compiled by AH Tan, November 2012鲁肃津Ainda não há avaliações
- Shirdi Sai Engg CollegeDocumento12 páginasShirdi Sai Engg CollegeSGSAinda não há avaliações
- Source Code:: 'Original Filter Response'Documento5 páginasSource Code:: 'Original Filter Response'sukeko_saileshAinda não há avaliações
- DKUT - CNTIII - Butterworth and Chebyshev Type I Filters - Guillemin's Algorithm NotesDocumento23 páginasDKUT - CNTIII - Butterworth and Chebyshev Type I Filters - Guillemin's Algorithm NotesmwangiAinda não há avaliações
- FIR Filter Design Using Window MethodDocumento33 páginasFIR Filter Design Using Window MethodphithucAinda não há avaliações
- DSP Assignment 3: IIR and FIR Filter DesignDocumento2 páginasDSP Assignment 3: IIR and FIR Filter DesignYabin CHENGAinda não há avaliações
- DSP PDFDocumento0 páginaDSP PDFvelkarthi92Ainda não há avaliações
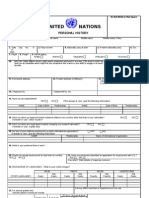
- United Nations: Personal HistoryDocumento4 páginasUnited Nations: Personal HistoryDang Iw FronstoneAinda não há avaliações
- Advance Power SystemDocumento2 páginasAdvance Power SystemPrashant ChaharAinda não há avaliações
- New Microsoft Word DocumentDocumento5 páginasNew Microsoft Word DocumentPrashant ChaharAinda não há avaliações
- Basic MATLAB ProgrammingDocumento4 páginasBasic MATLAB ProgrammingaadhargilhotraAinda não há avaliações
- AssignmentDocumento6 páginasAssignmentPrashant ChaharAinda não há avaliações
- A Matlab Based Teaching Tool For Digital Logic 001Documento7 páginasA Matlab Based Teaching Tool For Digital Logic 001hariAinda não há avaliações
- Need of ICT For Sustainable Development of Power SectorDocumento6 páginasNeed of ICT For Sustainable Development of Power SectorPrashant ChaharAinda não há avaliações
- Invoice 1Documento1 páginaInvoice 1Prashant ChaharAinda não há avaliações
- Malaviya National Institute of Technology Jaipur Application FormDocumento2 páginasMalaviya National Institute of Technology Jaipur Application FormPrashant ChaharAinda não há avaliações
- Need of ICT For Sustainable Development of Power SectorDocumento6 páginasNeed of ICT For Sustainable Development of Power SectorPrashant ChaharAinda não há avaliações
- Network Analysis BasicsDocumento115 páginasNetwork Analysis BasicsKashifChaudharyAinda não há avaliações
- General Questions: Who Can Do This Training Program / Eligibility For The Program?Documento2 páginasGeneral Questions: Who Can Do This Training Program / Eligibility For The Program?Prashant ChaharAinda não há avaliações
- About Blank PDFDocumento1 páginaAbout Blank PDFPrashant ChaharAinda não há avaliações
- Power System Control With Distributed Flexible Ac Transmission System DevicesDocumento67 páginasPower System Control With Distributed Flexible Ac Transmission System Devicesjagarov4954Ainda não há avaliações
- Use of Lipase Immobilized in K-Carrageenan by Encapsulation in Biodiesel ProductionDocumento12 páginasUse of Lipase Immobilized in K-Carrageenan by Encapsulation in Biodiesel ProductionPrashant ChaharAinda não há avaliações
- NeuronDocumento5 páginasNeuronPrashant ChaharAinda não há avaliações
- Deployment of Green Energy Sources PDFDocumento9 páginasDeployment of Green Energy Sources PDFPrashant ChaharAinda não há avaliações
- Page 18 of 40: EI 65 UNIT 1 .PPT Open WithDocumento1 páginaPage 18 of 40: EI 65 UNIT 1 .PPT Open WithPrashant ChaharAinda não há avaliações
- Deployment of Green Energy Sources PDFDocumento9 páginasDeployment of Green Energy Sources PDFPrashant ChaharAinda não há avaliações
- Deployment of Green Energy Sources PDFDocumento9 páginasDeployment of Green Energy Sources PDFPrashant ChaharAinda não há avaliações
- 109 New - 2Documento5 páginas109 New - 2Prashant ChaharAinda não há avaliações
- RCEW Conf. PaperDocumento6 páginasRCEW Conf. PaperPrashant ChaharAinda não há avaliações
- Ict SylDocumento36 páginasIct SylPrashant ChaharAinda não há avaliações
- Chanakya Technical Campus, Jaipur: Department of Electrical Engineering NoticeDocumento1 páginaChanakya Technical Campus, Jaipur: Department of Electrical Engineering NoticePrashant ChaharAinda não há avaliações
- AuditsDocumento8 páginasAuditsPrashant ChaharAinda não há avaliações
- Syllabus BTech Electrical Subject To Approval of Academic CoDocumento30 páginasSyllabus BTech Electrical Subject To Approval of Academic CoVishmay KumarAinda não há avaliações
- Tariff Plan - PresentationDocumento17 páginasTariff Plan - PresentationPrashant ChaharAinda não há avaliações
- Chankaya Technical Campus Jaipur Ist Midterm EEE Model Paper QuestionsDocumento2 páginasChankaya Technical Campus Jaipur Ist Midterm EEE Model Paper QuestionsPrashant ChaharAinda não há avaliações
- Syllabus BTech Electrical Subject To Approval of Academic CoDocumento30 páginasSyllabus BTech Electrical Subject To Approval of Academic CoVishmay KumarAinda não há avaliações
- Real Number Properties WorksheetsDocumento4 páginasReal Number Properties Worksheetsapi-150536296Ainda não há avaliações
- Prog 3112 Week 11-19Documento18 páginasProg 3112 Week 11-19Tanga KaAinda não há avaliações
- Supplementary Note335Documento21 páginasSupplementary Note335Syafiq ArtAinda não há avaliações
- Geo 5 User Guide enDocumento1.431 páginasGeo 5 User Guide enShahab KhaledAinda não há avaliações
- The Islamia University of Bahawalpur: Faculty of Engineering & TechnologyDocumento5 páginasThe Islamia University of Bahawalpur: Faculty of Engineering & TechnologyBeenish HassanAinda não há avaliações
- Svi Secivil Dec14Documento2 páginasSvi Secivil Dec14Rahul BajajAinda não há avaliações
- SIMSEN Help FileDocumento89 páginasSIMSEN Help FileSuresh CAinda não há avaliações
- Answer of IKMC 2010Documento1 páginaAnswer of IKMC 2010Minh PhươngAinda não há avaliações
- Cooling Tower Thermal DesignDocumento106 páginasCooling Tower Thermal Designxuense100% (4)
- Representing Sequences Recursively and ExplicitlyDocumento4 páginasRepresenting Sequences Recursively and Explicitlytwitch tv caibingweiAinda não há avaliações
- Chapter 3.4Documento9 páginasChapter 3.4Jhon Barzola PalominoAinda não há avaliações
- What You Need From Analysis: Appendix ADocumento31 páginasWhat You Need From Analysis: Appendix ACarlos BifiAinda não há avaliações
- B.tech. Civil Engineering Full Syllabus IndiaDocumento118 páginasB.tech. Civil Engineering Full Syllabus IndiaAnubhav GargAinda não há avaliações
- Syllabi Master of TechnologyDocumento63 páginasSyllabi Master of TechnologyRanjit Kumar ShahAinda não há avaliações
- Physics of RunningDocumento8 páginasPhysics of Runningcamil salameAinda não há avaliações
- Ac7101 3DDocumento24 páginasAc7101 3DNamelezz ShadowwAinda não há avaliações
- Flat and Elongated Particles TestDocumento4 páginasFlat and Elongated Particles Testmido_20067581Ainda não há avaliações
- BAYES ESTIMATOR OF ONE PARAMETER GAMMA DISTRIBUTIONDocumento16 páginasBAYES ESTIMATOR OF ONE PARAMETER GAMMA DISTRIBUTIONAyush choudharyAinda não há avaliações
- 50 Mathematical Puzzles and OdditiesDocumento88 páginas50 Mathematical Puzzles and OdditiesmatijahajekAinda não há avaliações
- MTH 101 - Logic AssignmentDocumento6 páginasMTH 101 - Logic AssignmentMaegan PanaliganAinda não há avaliações
- Quantile Regression (Final) PDFDocumento22 páginasQuantile Regression (Final) PDFbooianca100% (1)
- MCQ On Laplace TransformDocumento4 páginasMCQ On Laplace TransformVirag Kothari100% (1)
- Risk Management in Construction Project ManagementDocumento8 páginasRisk Management in Construction Project ManagementShakil AhmedAinda não há avaliações
- View Answer: TH Withou L T: TDocumento116 páginasView Answer: TH Withou L T: TshradhaAinda não há avaliações
- BE Applied Electronics and InstrumentationDocumento104 páginasBE Applied Electronics and InstrumentationEr Paramjit SinghAinda não há avaliações
- GRADE 3 KINDNESS Least Learned Skills in Mathematics2020 - 2021Documento2 páginasGRADE 3 KINDNESS Least Learned Skills in Mathematics2020 - 2021Ma88% (16)
- HSM 250 98 PDFDocumento6 páginasHSM 250 98 PDFChristopher JohnsonAinda não há avaliações
- (-/2 Points) SCALCET8 2.7.JIT.003.MI.: Details My Notes Ask Your Teacher Practice AnotherDocumento4 páginas(-/2 Points) SCALCET8 2.7.JIT.003.MI.: Details My Notes Ask Your Teacher Practice Anotherbilal5202050Ainda não há avaliações
- PHY2061 Enriched Physics 2 Lecture Notes: Coulomb's LawDocumento7 páginasPHY2061 Enriched Physics 2 Lecture Notes: Coulomb's LawRavi Kanth M NAinda não há avaliações
- ZTEC Instruments ZT - 4610-f - Dig Storage Scopes - Data Sheet PDFDocumento16 páginasZTEC Instruments ZT - 4610-f - Dig Storage Scopes - Data Sheet PDFchaparalAinda não há avaliações