Você também pode gostar
- The Yellow House: A Memoir (2019 National Book Award Winner)No EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Nota: 4 de 5 estrelas4/5 (98)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeNo EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeNota: 4 de 5 estrelas4/5 (5794)
- The Little Book of Hygge: Danish Secrets to Happy LivingNo EverandThe Little Book of Hygge: Danish Secrets to Happy LivingNota: 3.5 de 5 estrelas3.5/5 (400)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureNo EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureNota: 4.5 de 5 estrelas4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryNo EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryNota: 3.5 de 5 estrelas3.5/5 (231)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceNo EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceNota: 4 de 5 estrelas4/5 (895)
- Team of Rivals: The Political Genius of Abraham LincolnNo EverandTeam of Rivals: The Political Genius of Abraham LincolnNota: 4.5 de 5 estrelas4.5/5 (234)
- Never Split the Difference: Negotiating As If Your Life Depended On ItNo EverandNever Split the Difference: Negotiating As If Your Life Depended On ItNota: 4.5 de 5 estrelas4.5/5 (838)
- The Emperor of All Maladies: A Biography of CancerNo EverandThe Emperor of All Maladies: A Biography of CancerNota: 4.5 de 5 estrelas4.5/5 (271)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaNo EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaNota: 4.5 de 5 estrelas4.5/5 (266)
- The Unwinding: An Inner History of the New AmericaNo EverandThe Unwinding: An Inner History of the New AmericaNota: 4 de 5 estrelas4/5 (45)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersNo EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersNota: 4.5 de 5 estrelas4.5/5 (345)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyNo EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyNota: 3.5 de 5 estrelas3.5/5 (2259)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreNo EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreNota: 4 de 5 estrelas4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)No EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Nota: 4.5 de 5 estrelas4.5/5 (121)
- YEA-SIAZ-C844-2.2 (YASNAC PC NC Programming Manual) PDFDocumento318 páginasYEA-SIAZ-C844-2.2 (YASNAC PC NC Programming Manual) PDFIvan SmolejAinda não há avaliações
- Seminar TopicsDocumento5 páginasSeminar TopicsgauravrzawarAinda não há avaliações
- Codigo de Error en Pluto D20Documento4 páginasCodigo de Error en Pluto D20Zudeky LeónAinda não há avaliações
- Troubleshooting Manual For I/O Link Communication Alarm: (System Alarm PC050/PC150/971)Documento22 páginasTroubleshooting Manual For I/O Link Communication Alarm: (System Alarm PC050/PC150/971)huutan12345Ainda não há avaliações
- EZwarePlus Programming ManualDocumento367 páginasEZwarePlus Programming ManualQuality PlusAinda não há avaliações
- Siemens - s7 - 300 - 400 - PLC - & - Wincc - Flex - Hmi - Level - 1 - Equinox Training Solutions PDFDocumento3 páginasSiemens - s7 - 300 - 400 - PLC - & - Wincc - Flex - Hmi - Level - 1 - Equinox Training Solutions PDFM MAinda não há avaliações
- Scientech 2400GNDocumento178 páginasScientech 2400GNNikhil ShahAinda não há avaliações
- Network Wide DiagnosticsDocumento22 páginasNetwork Wide DiagnosticsAnandAinda não há avaliações
- PQM Ge - Esquema de ConexionesDocumento22 páginasPQM Ge - Esquema de ConexionesdennisplazaAinda não há avaliações
- Automation of Drawbridge Model Using by PLC: IarjsetDocumento8 páginasAutomation of Drawbridge Model Using by PLC: IarjsetAbhi RoutAinda não há avaliações
- DSE8620 Data Sheet (USA) PDFDocumento2 páginasDSE8620 Data Sheet (USA) PDFAdhitya Perdana SPAinda não há avaliações
- Technical Specification For PipelineDocumento119 páginasTechnical Specification For PipelineMauro MLRAinda não há avaliações
- Chapter 7Documento25 páginasChapter 7Alesha ZahraAinda não há avaliações
- FX2N-10PG 使用手冊 英文Documento112 páginasFX2N-10PG 使用手冊 英文hsuyiweiAinda não há avaliações
- E500 - FD - Rel11 - Part3 - DIN Rail Solutions PDFDocumento47 páginasE500 - FD - Rel11 - Part3 - DIN Rail Solutions PDFİbrahim TuncalAinda não há avaliações
- GT1020 GT1030 BrochureDocumento8 páginasGT1020 GT1030 BrochureAlafael AraújoAinda não há avaliações
- MP 2300Documento58 páginasMP 2300mssuraj100% (1)
- G650man A PDFDocumento639 páginasG650man A PDFarturo neiraAinda não há avaliações
- Catalogo Fatek Plcs b1b1z - en 2018Documento8 páginasCatalogo Fatek Plcs b1b1z - en 2018Fernando BalsecaAinda não há avaliações
- Overview of Mecon LimitedDocumento5 páginasOverview of Mecon LimitedMd Irfan AhmadAinda não há avaliações
- DYN5 EIP Specification R1.1ADocumento40 páginasDYN5 EIP Specification R1.1AluisAinda não há avaliações
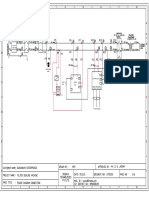
- 5 POWER DIAGRAM OFFLINE-ModelDocumento1 página5 POWER DIAGRAM OFFLINE-ModelJitAinda não há avaliações
- WO 2053 Handling Sec 5-1 Electric Diagram PreliminaryDocumento245 páginasWO 2053 Handling Sec 5-1 Electric Diagram PreliminaryMinh TrầnAinda não há avaliações
- ManuaisDocumento53 páginasManuaisJose Carlos KappAinda não há avaliações
- Ti34p02a03 01e Part A - 008Documento20 páginasTi34p02a03 01e Part A - 008rabi gurungAinda não há avaliações
- Manual ArduBoxDocumento21 páginasManual ArduBoxEmilio BonnetAinda não há avaliações
- V 2172 0020 0031 - Rev - 6 (3458748) PDFDocumento262 páginasV 2172 0020 0031 - Rev - 6 (3458748) PDFLG Milton LuisAinda não há avaliações
- Commander C DatasheetDocumento12 páginasCommander C DatasheetJoão RigorAinda não há avaliações
- UG 3-2 R19 Mech SyllabusDocumento25 páginasUG 3-2 R19 Mech SyllabusSarath KumarAinda não há avaliações