Você também pode gostar
- Introducción Al Psoc5Lp: Teoría y aplicaciones prácticaNo EverandIntroducción Al Psoc5Lp: Teoría y aplicaciones prácticaAinda não há avaliações
- Aprender Arduino, prototipado y programación avanzada con 100 ejerciciosNo EverandAprender Arduino, prototipado y programación avanzada con 100 ejerciciosNota: 5 de 5 estrelas5/5 (5)
- Programación PLC con consolaDocumento19 páginasProgramación PLC con consolachilefenomenoidesAinda não há avaliações
- S Mod Mod30ml - EsDocumento13 páginasS Mod Mod30ml - EsJavi RomanAinda não há avaliações
- Curso Basico S7-200Documento66 páginasCurso Basico S7-200Ramiro Victoria Alvarez100% (1)
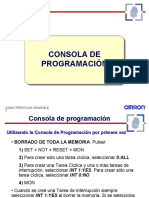
- Consola de programación: características y usoDocumento46 páginasConsola de programación: características y usoFelipe VargasAinda não há avaliações
- Preguntas KUKADocumento6 páginasPreguntas KUKAsantyAinda não há avaliações
- Alarma Codificada Usando PLCDocumento8 páginasAlarma Codificada Usando PLCJuano Inga OrtegaAinda não há avaliações
- Trabajo Profe KarloDocumento15 páginasTrabajo Profe KarloMelissa ContrerasAinda não há avaliações
- Capitulo 5Documento25 páginasCapitulo 5Jose Grau TejedaAinda não há avaliações
- 01-Manual Twido I C2 PLC TwidoDocumento13 páginas01-Manual Twido I C2 PLC Twidosmeneses741Ainda não há avaliações
- Practica1 MicroproDocumento11 páginasPractica1 MicroproJairo Jesus Navarrete LomaAinda não há avaliações
- Laboratorio PLC OMRON: Introducción programaciónDocumento70 páginasLaboratorio PLC OMRON: Introducción programaciónSaid Ortiz100% (3)
- Cea36..... Controlador de AscensorDocumento48 páginasCea36..... Controlador de AscensorJuan Alejandro Hurtado Chirinos100% (3)
- Manual Novus 1100Documento9 páginasManual Novus 1100Rodrigo Alfonso Grego GazaleAinda não há avaliações
- Tarea 1 10 PTSDocumento6 páginasTarea 1 10 PTSc.j. rodriquezAinda não há avaliações
- Dispositivos PerifericosDocumento4 páginasDispositivos PerifericosmanuelAinda não há avaliações
- Practica 6 PLCDocumento25 páginasPractica 6 PLCalvackerAinda não há avaliações
- Manual Del Usuario CEA 32Documento45 páginasManual Del Usuario CEA 32Leo Dos RamosAinda não há avaliações
- Descripción y Uso Del PLC LOGO 230 RC SiemensDocumento12 páginasDescripción y Uso Del PLC LOGO 230 RC SiemensFredy Aguilar Rondan70% (10)
- Curso Keyence CompletoDocumento54 páginasCurso Keyence CompletoFeLipe Aristizabal Cardona75% (4)
- Manual N3000Documento20 páginasManual N3000Kathleen KleinAinda não há avaliações
- Seminario de PLC BasDocumento97 páginasSeminario de PLC BasjaimeasisaAinda não há avaliações
- Zelio (CEDOM)Documento81 páginasZelio (CEDOM)Santi Garcia SedoAinda não há avaliações
- Zelio (CEDOM)Documento81 páginasZelio (CEDOM)Roberto Armendariz DavilaAinda não há avaliações
- UT 8 Control de Procesos SecuencialesDocumento6 páginasUT 8 Control de Procesos SecuencialesAtteneri Medina RodríguezAinda não há avaliações
- Arranque directo PLCDocumento11 páginasArranque directo PLCPiero Archi VioAinda não há avaliações
- Caracteristicas Robot-2c Controlador y Teach Box PDFDocumento8 páginasCaracteristicas Robot-2c Controlador y Teach Box PDFJohn VH100% (1)
- Mitsubishi Automation: Controladores Lógicos Programables y Soluciones de AutomatizaciónDocumento101 páginasMitsubishi Automation: Controladores Lógicos Programables y Soluciones de AutomatizaciónSantiago VAAinda não há avaliações
- Curso general PLCsDocumento48 páginasCurso general PLCsCarlos Fernandez SamanoAinda não há avaliações
- PLCDocumento52 páginasPLCsuero100Ainda não há avaliações
- Curso General de Automatas Programables Industriales Omronpdf PDFDocumento130 páginasCurso General de Automatas Programables Industriales Omronpdf PDFLukasAinda não há avaliações
- Curso PLC OmronDocumento359 páginasCurso PLC Omronlalo502100% (2)
- PLC - Informacion GeneralDocumento46 páginasPLC - Informacion GeneralGilberto MottoAinda não há avaliações
- Curso General de Autómatas Programables Industriales - OMRON PDFDocumento359 páginasCurso General de Autómatas Programables Industriales - OMRON PDFpevare100% (5)
- CAP. 1 Curso PLC OmronDocumento61 páginasCAP. 1 Curso PLC OmronFreddy Torres100% (2)
- Ejercicios de Programacic3b3n Resueltos Con Step 7 PDFDocumento71 páginasEjercicios de Programacic3b3n Resueltos Con Step 7 PDFSpawnkarioto100% (1)
- Informe On OffDocumento15 páginasInforme On Offmanuel tovarAinda não há avaliações
- Estructura Interna de Un PLCDocumento10 páginasEstructura Interna de Un PLCRoblero LopezAinda não há avaliações
- Folleto PLC U2 PDFDocumento35 páginasFolleto PLC U2 PDFjkl012Ainda não há avaliações
- Intri¿oduccion PLC MitsubishiDocumento19 páginasIntri¿oduccion PLC MitsubishiJohnVillegasAinda não há avaliações
- Automatas Programables Industriales API - PLCDocumento29 páginasAutomatas Programables Industriales API - PLCmaicolmzAinda não há avaliações
- 1mrk500080-Ues Es Guia de Introduccion Ied670Documento12 páginas1mrk500080-Ues Es Guia de Introduccion Ied670edwk_22Ainda não há avaliações
- UE LOGO!-Características GeneralesDocumento15 páginasUE LOGO!-Características GeneralesLiam JJ100% (1)
- Practica 3 - Semaforo Con LimitsDocumento12 páginasPractica 3 - Semaforo Con LimitsDavid SanAinda não há avaliações
- Manual de Maquina CNCDocumento69 páginasManual de Maquina CNCBianca CruzAinda não há avaliações
- Omron 01Documento48 páginasOmron 01david_amedAinda não há avaliações
- Anti Robo Sovica Exa C325Documento8 páginasAnti Robo Sovica Exa C325Doris Gabriela Sierra100% (1)
- Control de bandas transportadorasDocumento18 páginasControl de bandas transportadorasAlvaro Durán StellaAinda não há avaliações
- PLC S7-300 MódulosDocumento6 páginasPLC S7-300 MódulosMiguel A. MartínAinda não há avaliações
- Reporte Práctica 3Documento24 páginasReporte Práctica 3Yolanda MartínezAinda não há avaliações
- RAADocumento16 páginasRAARafael MancillaAinda não há avaliações
- Controladores CNC para TornosDocumento16 páginasControladores CNC para TornosSchz Angela100% (1)
- Automatizacion Con PlcsDocumento129 páginasAutomatizacion Con PlcsPreceptor SomaAinda não há avaliações
- Compilador C CCS y Simulador Proteus para Microcontroladores PICNo EverandCompilador C CCS y Simulador Proteus para Microcontroladores PICNota: 2.5 de 5 estrelas2.5/5 (5)
- 100 circuitos de shields para arduino (español)No Everand100 circuitos de shields para arduino (español)Nota: 3.5 de 5 estrelas3.5/5 (3)
- UF0852 - Instalación y actualización de sistemas operativosNo EverandUF0852 - Instalación y actualización de sistemas operativosNota: 5 de 5 estrelas5/5 (1)
- UF0466 - Testeo y verificación de equipos y periféricos microinformáticosNo EverandUF0466 - Testeo y verificación de equipos y periféricos microinformáticosAinda não há avaliações
- Aprender Arduino, electrónica y programación con 100 ejercicios prácticosNo EverandAprender Arduino, electrónica y programación con 100 ejercicios prácticosNota: 4.5 de 5 estrelas4.5/5 (14)
- Programación de microcontroladores paso a paso: Ejemplos prácticos desarrollados en la nubeNo EverandProgramación de microcontroladores paso a paso: Ejemplos prácticos desarrollados en la nubeAinda não há avaliações
- Tecnologías de La Información y Comunicación (TIC) .Documento6 páginasTecnologías de La Información y Comunicación (TIC) .Mariia RodriiguezAinda não há avaliações
- EVEREST Ultimate EditionDocumento20 páginasEVEREST Ultimate EditionJanice JohnsonAinda não há avaliações
- Evaluación Final - Escenario 8 HERRAMIENTAS PARA LA PRODUCTIVIDADDocumento9 páginasEvaluación Final - Escenario 8 HERRAMIENTAS PARA LA PRODUCTIVIDADAlex Alegria75% (4)
- Informe de comentarios sobre elementosDocumento2 páginasInforme de comentarios sobre elementosRichard Salavarria50% (4)
- 3 SincronizacionDocumento94 páginas3 SincronizacionJesúsAinda não há avaliações
- Anexo 1 - Hoja de Cálculo (1) DannaDocumento4 páginasAnexo 1 - Hoja de Cálculo (1) DannaPaola Andrea Romero AmayaAinda não há avaliações
- Ensayo Estructuras de Control en C++ y Sus AplicacionesDocumento9 páginasEnsayo Estructuras de Control en C++ y Sus AplicacionesClaudio Angel Pimentel MercedesAinda não há avaliações
- Uso de Calculadoras en La EvauDocumento1 páginaUso de Calculadoras en La EvauFrancisco Godoy SanchezAinda não há avaliações
- BACULADocumento36 páginasBACULAAntonio Dionicio GuzmánAinda não há avaliações
- Rich FacesDocumento6 páginasRich FacesFreddy ValenciaAinda não há avaliações
- Mantenimiento y OperacionesDocumento17 páginasMantenimiento y OperacionesEduardo RangelAinda não há avaliações
- Xorcom Xp0120 Instalacion RapidaDocumento4 páginasXorcom Xp0120 Instalacion RapidaHéctor Manuel Linares AyalaAinda não há avaliações
- Resumen JMSDocumento3 páginasResumen JMSVictor Emmanuel Ureña NapolesAinda não há avaliações
- Montar Red InalambricaDocumento19 páginasMontar Red Inalambricaapi-3702309Ainda não há avaliações
- Informe 1 Llumigusin Vallejo GR2-1Documento5 páginasInforme 1 Llumigusin Vallejo GR2-1goqkoAinda não há avaliações
- Manual Instrucciones Dymo Labelwriter 450Documento30 páginasManual Instrucciones Dymo Labelwriter 450carmenAinda não há avaliações
- JFo Project EspDocumento1 páginaJFo Project EspDina MezaAinda não há avaliações
- ManualAmibaRevA PDFDocumento3 páginasManualAmibaRevA PDFanon_234708270Ainda não há avaliações
- Instalar Centos 7 en Virtualbox - View - Wiki - The SaltOS ProjectDocumento14 páginasInstalar Centos 7 en Virtualbox - View - Wiki - The SaltOS ProjectMary MendozaAinda não há avaliações
- Investigate BIOS or UEFI Settings HechoDocumento4 páginasInvestigate BIOS or UEFI Settings HechoSamuel José Roa VenturaAinda não há avaliações
- Cuestionario 1 El Ordenador DanielDocumento3 páginasCuestionario 1 El Ordenador Danieldanygameryt2010Ainda não há avaliações
- Proceso de AlgoritmosDocumento15 páginasProceso de Algoritmosonill100% (1)
- Resumen Expo Cliente ServidorDocumento24 páginasResumen Expo Cliente ServidorOscar AlvarezAinda não há avaliações
- DescargaEnWebPython Equipo5Documento12 páginasDescargaEnWebPython Equipo5mayte fadriqueAinda não há avaliações
- ARSI U1AA1 Requerimientos Uveg Ok 1Documento8 páginasARSI U1AA1 Requerimientos Uveg Ok 1Juan Manuel Rodriguez MendezAinda não há avaliações
- T O S H I B A TRX-80 by MediosLibres V1.0Documento9 páginasT O S H I B A TRX-80 by MediosLibres V1.0Xavier HernándezAinda não há avaliações
- Guía de estudio de CCNA 4 Capítulo 5Documento6 páginasGuía de estudio de CCNA 4 Capítulo 5jfvm666Ainda não há avaliações
- Modsecurity ManualDocumento17 páginasModsecurity Manualdarkness5125Ainda não há avaliações
- Creacion de Red Lan: Danna Martinez Sebastián Silvia Oscar Gómez Yuliehd Puentes Santiago CongoDocumento16 páginasCreacion de Red Lan: Danna Martinez Sebastián Silvia Oscar Gómez Yuliehd Puentes Santiago CongosebastianAinda não há avaliações
- 1102P14US0 Ficha Técnica: ECOSYS M4132idnDocumento1 página1102P14US0 Ficha Técnica: ECOSYS M4132idnBethia KerenAinda não há avaliações