Você também pode gostar
- Conveyor Belt ControllerDocumento8 páginasConveyor Belt Controllersd_projectmakerAinda não há avaliações
- PLC and Control System and AnalysisDocumento10 páginasPLC and Control System and AnalysisM.AllaritAinda não há avaliações
- Lab 4 ReportDocumento17 páginasLab 4 ReportO OmAinda não há avaliações
- Line Follower RobotDocumento22 páginasLine Follower Robotkawish4uAinda não há avaliações
- Ultrasonic Range Finder Using 8051Documento6 páginasUltrasonic Range Finder Using 8051Jason Hendricks100% (3)
- Automatic Room Light Controller With Visitor Counter: DescriptionDocumento10 páginasAutomatic Room Light Controller With Visitor Counter: DescriptionDanny PinheiroAinda não há avaliações
- Micro Controller Assignment 2 (All 24 From Shiva Prasad)Documento88 páginasMicro Controller Assignment 2 (All 24 From Shiva Prasad)Shashank M ChanmalAinda não há avaliações
- Smart Bus: Seat CounterDocumento6 páginasSmart Bus: Seat Counterarunv692Ainda não há avaliações
- Reason To DownloadDocumento9 páginasReason To Downloadwisegeek01Ainda não há avaliações
- World Skill CompetitionDocumento2 páginasWorld Skill Competitionchanchalla KumariAinda não há avaliações
- Ultrasonic Range Finder Using 8051 - 4 Steps - InstructablesDocumento4 páginasUltrasonic Range Finder Using 8051 - 4 Steps - InstructablesAbdo HeshamAinda não há avaliações
- Micro Controller Lab 3Documento11 páginasMicro Controller Lab 3Talk Shows CentreAinda não há avaliações
- GFDGFDDocumento2 páginasGFDGFDNisal Nuwan SenarathnaAinda não há avaliações
- Lab 4 (PLC)Documento7 páginasLab 4 (PLC)samu1991tan100% (1)
- Assignment BENC 2413 SEM1 - 2020 - 2021Documento4 páginasAssignment BENC 2413 SEM1 - 2020 - 2021Insyiraah ArifAinda não há avaliações
- Working Principle: 1) System CheckDocumento8 páginasWorking Principle: 1) System CheckHans IngoleAinda não há avaliações
- Digital ElectronicsDocumento20 páginasDigital Electronics1balamanianAinda não há avaliações
- Unit-Ii CoaDocumento17 páginasUnit-Ii CoaArunPrasadAinda não há avaliações
- U-I. Computer Instruction and Hardwired ControlDocumento16 páginasU-I. Computer Instruction and Hardwired ControlJk RinkuAinda não há avaliações
- Logic GatesDocumento6 páginasLogic GatesReeja MathewAinda não há avaliações
- Look Into The Eye From TI' For Precision Light Readings: Column #21, November 1996 by Scott EdwardsDocumento10 páginasLook Into The Eye From TI' For Precision Light Readings: Column #21, November 1996 by Scott Edwardslgrome73100% (1)
- Project On: To Design Pic16F877A Microcontroller Based LPG Detector With Exhaust Fan ControlDocumento47 páginasProject On: To Design Pic16F877A Microcontroller Based LPG Detector With Exhaust Fan ControlRanjeet GuptaAinda não há avaliações
- Automatic Bidirectional Visitor Counter Using 8051 MicrocontrollerDocumento4 páginasAutomatic Bidirectional Visitor Counter Using 8051 MicrocontrollercarlonerigatusAinda não há avaliações
- Simple Automated System Using PLCDocumento18 páginasSimple Automated System Using PLCUpeksha IllanganthilakaAinda não há avaliações
- 3Documento55 páginas3aimamAinda não há avaliações
- PLC Programs PDFDocumento29 páginasPLC Programs PDFsagar_sgrAinda não há avaliações
- Automated Multilevel Car Parking System ProjectDocumento21 páginasAutomated Multilevel Car Parking System ProjectOdhieAinda não há avaliações
- Sheet 2Documento14 páginasSheet 2Lina M. Abd ElSalamAinda não há avaliações
- Rotary EncoderDocumento6 páginasRotary EncoderalesysAinda não há avaliações
- Automatic Car Parking Space Management System: ConstructionDocumento3 páginasAutomatic Car Parking Space Management System: Constructionrudra_1Ainda não há avaliações
- Department of Electrical and Electronic EngineeringDocumento9 páginasDepartment of Electrical and Electronic EngineeringKelly Leon0% (1)
- MT Ha CPDocumento4 páginasMT Ha CPRishikesh ThakurAinda não há avaliações
- Ultrasonic Range Finder Using 8051 .: You Can Buy This Project From Our Store NowDocumento12 páginasUltrasonic Range Finder Using 8051 .: You Can Buy This Project From Our Store NowGOHAR GHAFFARAinda não há avaliações
- Computer Archiecture 1 D3804a15Documento5 páginasComputer Archiecture 1 D3804a15Surendra Singh ChauhanAinda não há avaliações
- Programming Examples 1Documento17 páginasProgramming Examples 1Dr-Amit Kumar SinghAinda não há avaliações
- TL TN DKLG - PLC - Rev20221127Documento31 páginasTL TN DKLG - PLC - Rev20221127Nguyễn Quốc ToànAinda não há avaliações
- Assignment 1:-: Assignments On No/NcDocumento3 páginasAssignment 1:-: Assignments On No/NcsalonyAinda não há avaliações
- A Project Report On Car Safety SystemDocumento31 páginasA Project Report On Car Safety SystemNishant MoreAinda não há avaliações
- Intelligent Train EnginesDocumento6 páginasIntelligent Train EnginesBulla BachelorAinda não há avaliações
- ELC111.2 Laboratory 2 - Pre LabDocumento2 páginasELC111.2 Laboratory 2 - Pre LabRechelAurelioDeAsisAinda não há avaliações
- Örnek PLC ProgramlarıDocumento28 páginasÖrnek PLC ProgramlarıBekir IşengerAinda não há avaliações
- Circuit TodayDocumento30 páginasCircuit TodayBrian GiriAinda não há avaliações
- Digital Stopwatch 0-99secDocumento4 páginasDigital Stopwatch 0-99secSanjay BalwaniAinda não há avaliações
- Mazvita C Form 4 Control SystemsDocumento4 páginasMazvita C Form 4 Control SystemsJasonAinda não há avaliações
- Intelligent Train EnginesDocumento14 páginasIntelligent Train EnginesExodus Kwaku OforiAinda não há avaliações
- PLC Ladder Examples 2021Documento18 páginasPLC Ladder Examples 2021JosephAinda não há avaliações
- Smoke SensorDocumento10 páginasSmoke SensorPrabhat SharmaAinda não há avaliações
- DLD Lab No. 14Documento6 páginasDLD Lab No. 14rizwan900Ainda não há avaliações
- Petroleum Products Color Detecting System Using RGB Color SensorDocumento6 páginasPetroleum Products Color Detecting System Using RGB Color SensorIOSRJEN : hard copy, certificates, Call for Papers 2013, publishing of journalAinda não há avaliações
- PLC ExperimentDocumento6 páginasPLC Experimentyttan1116Ainda não há avaliações
- 16 Bit CalculatorDocumento17 páginas16 Bit CalculatorPankaj JaiswalAinda não há avaliações
- Line Follower RobotDocumento10 páginasLine Follower Robotvishal groverAinda não há avaliações
- ECE222 DP1 Binary MultiplierDocumento8 páginasECE222 DP1 Binary Multiplierprasad357Ainda não há avaliações
- Workbook PLCDocumento16 páginasWorkbook PLCkhairul fahmiAinda não há avaliações
- A Project Report On Line Follower: RobotDocumento14 páginasA Project Report On Line Follower: RobotMegha OmshreeAinda não há avaliações
- Hardware Features of 8051Documento52 páginasHardware Features of 8051Manjunath Shimoga100% (1)
- PLC Ho 18 PDFDocumento11 páginasPLC Ho 18 PDFatif_uett100% (1)
- Projects With Microcontrollers And PICCNo EverandProjects With Microcontrollers And PICCNota: 5 de 5 estrelas5/5 (1)
- Exercises in Electronics: Operational Amplifier CircuitsNo EverandExercises in Electronics: Operational Amplifier CircuitsNota: 3 de 5 estrelas3/5 (1)
- A16b 1310 0010 01 Power Unit Fanuc Manual PDFDocumento635 páginasA16b 1310 0010 01 Power Unit Fanuc Manual PDFNisar AhmedAinda não há avaliações
- Thermal (Overload) Motor Relay ProtectionDocumento8 páginasThermal (Overload) Motor Relay ProtectionNisar AhmedAinda não há avaliações
- Mitsubishi A200 Manual-1Documento124 páginasMitsubishi A200 Manual-1agarcos100% (1)
- Fanuc Alarm PDFDocumento72 páginasFanuc Alarm PDFcardoso5286% (7)
- Ug-26 Skad-Kad 04Documento1 páginaUg-26 Skad-Kad 04Nisar AhmedAinda não há avaliações
- Irt WP12 230 PDFDocumento2 páginasIrt WP12 230 PDFNisar AhmedAinda não há avaliações
- Dfi Sd631 q170 Atx DatasheetDocumento2 páginasDfi Sd631 q170 Atx DatasheetNisar Ahmed0% (1)
- O359h MilDocumento90 páginasO359h MilNisar AhmedAinda não há avaliações
- PDFDocumento24 páginasPDFNisar AhmedAinda não há avaliações
- HeatingDocumento10 páginasHeatingNisar AhmedAinda não há avaliações
- Em-Xx IngDocumento1 páginaEm-Xx IngNisar AhmedAinda não há avaliações
- Fundamentals of CNC MachiningDocumento256 páginasFundamentals of CNC Machiningdig_it100% (1)
- Bartelt Solutions ManualDocumento63 páginasBartelt Solutions ManualInnocent PersonAinda não há avaliações
- C (161 194)Documento34 páginasC (161 194)Nisar AhmedAinda não há avaliações
- GK-XX IngDocumento1 páginaGK-XX IngNisar AhmedAinda não há avaliações
- Rs-422 Splitter Circuit DiagramDocumento1 páginaRs-422 Splitter Circuit DiagramNisar AhmedAinda não há avaliações
- PDFDocumento24 páginasPDFNisar AhmedAinda não há avaliações
- Irt WP12 230 PDFDocumento2 páginasIrt WP12 230 PDFNisar AhmedAinda não há avaliações
- RS-422 Splitter PDFDocumento1 páginaRS-422 Splitter PDFNisar AhmedAinda não há avaliações
- Em-Xx IngDocumento1 páginaEm-Xx IngNisar AhmedAinda não há avaliações
- Functions of An Variable Frequency Drive VFD 1Documento12 páginasFunctions of An Variable Frequency Drive VFD 1Angelo FranklinAinda não há avaliações
- h7cx Aud1 NDocumento64 páginash7cx Aud1 NNisar AhmedAinda não há avaliações
- Functions of An Variable Frequency Drive VFD 1Documento12 páginasFunctions of An Variable Frequency Drive VFD 1Angelo FranklinAinda não há avaliações
- Standard Heavy Duty Limit Switches FD/FP/FL: Options and Ordering CodesDocumento9 páginasStandard Heavy Duty Limit Switches FD/FP/FL: Options and Ordering CodesNisar AhmedAinda não há avaliações
- Irt WP12 230 PDFDocumento2 páginasIrt WP12 230 PDFNisar AhmedAinda não há avaliações
- Dav-Xxx IngDocumento1 páginaDav-Xxx IngNisar AhmedAinda não há avaliações
- Ug-26 Skad-Kad 04Documento1 páginaUg-26 Skad-Kad 04Nisar AhmedAinda não há avaliações
- HV350 CatalogDocumento5 páginasHV350 CatalogNisar AhmedAinda não há avaliações
- HV350 CatalogDocumento5 páginasHV350 CatalogNisar AhmedAinda não há avaliações
- GK-XX IngDocumento1 páginaGK-XX IngNisar AhmedAinda não há avaliações
- EBS Data MaskingDocumento31 páginasEBS Data MaskingNawab ShariefAinda não há avaliações
- TPM Manual Quality - HozenDocumento50 páginasTPM Manual Quality - Hozenmagudeesh100% (1)
- Newton Laws of Motion JeopardyDocumento19 páginasNewton Laws of Motion JeopardyJessiel GueribaAinda não há avaliações
- Misumi s5m Pulley p1117Documento1 páginaMisumi s5m Pulley p1117tigor carakaAinda não há avaliações
- Training CoursesDocumento16 páginasTraining CoursesFeroz KhanAinda não há avaliações
- Catalog C60H-DCDocumento6 páginasCatalog C60H-DCNae MocioiAinda não há avaliações
- Fabshield Offshore 71ni-1Documento2 páginasFabshield Offshore 71ni-1Anonymous ejnktktkY7Ainda não há avaliações
- Adjustable Juice Groove Jig: Step 1: Jig Base and Bit DistanceDocumento5 páginasAdjustable Juice Groove Jig: Step 1: Jig Base and Bit DistanceRod HyattAinda não há avaliações
- Design of A 30 Storey Office Building With Reinforced Concrete Design Using Etabs Structural SoftwareDocumento51 páginasDesign of A 30 Storey Office Building With Reinforced Concrete Design Using Etabs Structural SoftwareAyodele Oluwaseyi Dina100% (1)
- MH16 Series ROOFTOP AC Manual REV 2013Documento19 páginasMH16 Series ROOFTOP AC Manual REV 2013caleb perezAinda não há avaliações
- Formulation of Immediate Release Dosage Form of Ranitidine HCL Tabletsusing HPMC and Starch Acetate Film FormerDocumento11 páginasFormulation of Immediate Release Dosage Form of Ranitidine HCL Tabletsusing HPMC and Starch Acetate Film Formersunaina agarwalAinda não há avaliações
- PCTDS 027 Fendolite MII Cold Wet Weather ApplicationDocumento2 páginasPCTDS 027 Fendolite MII Cold Wet Weather ApplicationMohammed AhteshamAinda não há avaliações
- Slum FinalDocumento46 páginasSlum FinalSanghita Bhowmick83% (6)
- Six Sigma Report Out TemplateDocumento55 páginasSix Sigma Report Out Templatevijayasarathy201325350% (2)
- AA Holtz & Kovacs - An Introduction To Geotechnical Engineering PDFDocumento746 páginasAA Holtz & Kovacs - An Introduction To Geotechnical Engineering PDFPeterAinda não há avaliações
- Chapter 6 SlidesDocumento28 páginasChapter 6 Slidesshinde_jayesh2005Ainda não há avaliações
- Muhammad Akif Naeem Open Ended Lab Signals and SystemDocumento20 páginasMuhammad Akif Naeem Open Ended Lab Signals and SystemMuhammad Akif NaeemAinda não há avaliações
- Technical Information Sheet: General Information: ISO 12944 TI - G 9 / UsaDocumento6 páginasTechnical Information Sheet: General Information: ISO 12944 TI - G 9 / UsaBash MatAinda não há avaliações
- Chemistry, Intermediate II Year Model Question PapersDocumento3 páginasChemistry, Intermediate II Year Model Question PapersAkshay PandeyAinda não há avaliações
- IoT - Building Blocks, Applications and ChallengesDocumento60 páginasIoT - Building Blocks, Applications and ChallengesRamanamurthy Saripalli0% (1)
- Repair Kit Hitachi PlasmaDocumento4 páginasRepair Kit Hitachi Plasmacolman123456789100% (1)
- EVI DC Inverter Technical Manual 2 Capacity TableDocumento67 páginasEVI DC Inverter Technical Manual 2 Capacity TableMouyed Al QasemAinda não há avaliações
- Production Support ProcessDocumento15 páginasProduction Support ProcesssantoshAinda não há avaliações
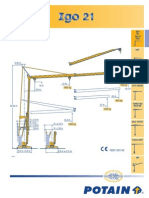
- Potain Igo 21 PDFDocumento4 páginasPotain Igo 21 PDFMarco CruzAinda não há avaliações
- BCM NotesDocumento25 páginasBCM NotesAman AgrawalAinda não há avaliações
- Continuous Thread Stud Double End Stud ADocumento11 páginasContinuous Thread Stud Double End Stud AMarius Mihai Buzduga0% (1)
- Bolts TheoryDocumento30 páginasBolts TheoryIbrahim Mesfin100% (1)
- Literature ReviewDocumento2 páginasLiterature ReviewkhairulAinda não há avaliações
- Bernette Ramirez Mariano Bernette Ramirez MarianoDocumento1 páginaBernette Ramirez Mariano Bernette Ramirez Marianomia palacioAinda não há avaliações
- Led Linear Emergency 2021Documento4 páginasLed Linear Emergency 2021Sugumaran LakshmananAinda não há avaliações