Você também pode gostar
- Funciones MatemáticasDocumento19 páginasFunciones MatemáticasVictoria PerezAinda não há avaliações
- Automatización y Robótica 4.0Documento22 páginasAutomatización y Robótica 4.0Victoria PerezAinda não há avaliações
- Manual de AsignaturaDocumento105 páginasManual de AsignaturaVictoria Perez100% (1)
- Manual de Asignatura - Automatizacion y RoboticaDocumento82 páginasManual de Asignatura - Automatizacion y RoboticaVictoria PerezAinda não há avaliações
- Presentacion TPM PEPSIDocumento46 páginasPresentacion TPM PEPSIVictoria Perez100% (1)
- Ejercicios de LimitesDocumento5 páginasEjercicios de LimitesVictoria PerezAinda não há avaliações
- Seguimiento de Estadías (2017) - EjemploDocumento2 páginasSeguimiento de Estadías (2017) - EjemploVictoria PerezAinda não há avaliações
- 5 Adquisicion de Datos Por Puerto ParareloDocumento4 páginas5 Adquisicion de Datos Por Puerto ParareloVictoria PerezAinda não há avaliações
- 12 Vision ArtificialDocumento1 página12 Vision ArtificialVictoria PerezAinda não há avaliações
- 10 Visualizacion y Control de ProcesosDocumento15 páginas10 Visualizacion y Control de ProcesosVictoria PerezAinda não há avaliações
- Tarea2 Grupo 76Documento14 páginasTarea2 Grupo 76Cristian RuizAinda não há avaliações
- Lab - 01 Funciones LógicasDocumento6 páginasLab - 01 Funciones Lógicaschristian lezama cuellarAinda não há avaliações
- Manual LCD Shield DynaduinoDocumento7 páginasManual LCD Shield DynaduinoLeider montero lunaAinda não há avaliações
- Algo de Control EléctricoDocumento31 páginasAlgo de Control EléctricoPerez LopezAinda não há avaliações
- Geolocalización y GeorreferenciaciónDocumento7 páginasGeolocalización y GeorreferenciaciónHomer VasquezAinda não há avaliações
- Ley de BraggDocumento7 páginasLey de BraggVin Doyle BravoAinda não há avaliações
- Procesadores de LenguajeDocumento2 páginasProcesadores de LenguajeIrwin de PazAinda não há avaliações
- Manual Operacion Humidificador MR850 - EsDocumento62 páginasManual Operacion Humidificador MR850 - EsNACION00183% (12)
- Estructura Atomica Fisica CuanticaDocumento65 páginasEstructura Atomica Fisica CuanticaHow to survive in LOLAinda não há avaliações
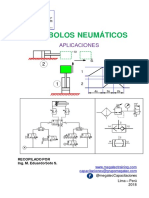
- Simbolos NeumaticosDocumento46 páginasSimbolos NeumaticosWaldir Jhon Gonzalez67% (3)
- RP 20la70Documento27 páginasRP 20la70alexhaloAinda não há avaliações
- GatoDocumento5 páginasGatoJonathanAinda não há avaliações
- Accesorios BMW E46Documento35 páginasAccesorios BMW E46Chimo Borras Sanchez100% (1)
- 1.7.2.los Materiales de Aporte para SoldaduraDocumento11 páginas1.7.2.los Materiales de Aporte para SoldaduraMiguel Sandoval CrisantoAinda não há avaliações
- TermografDocumento16 páginasTermografLa Mata Mendez100% (1)
- Laboratorio SemaforosDocumento10 páginasLaboratorio SemaforosCristian Alexis Angarita RodríguezAinda não há avaliações
- JuiceBox Pro & Pro Cellular - Instalation Manual - ESDocumento26 páginasJuiceBox Pro & Pro Cellular - Instalation Manual - ESDrakhoAinda não há avaliações
- Actividad 1Documento3 páginasActividad 1Paco TAinda não há avaliações
- CAPITULO IIIP SuperterminadoDocumento29 páginasCAPITULO IIIP SuperterminadoDAVIDAinda não há avaliações
- Operadores BinariosDocumento2 páginasOperadores BinariosProfa Lucía Santeramo100% (2)
- Practica Triac SCRDocumento10 páginasPractica Triac SCRPablo FlowersAinda não há avaliações
- Informe de OsciloscopioDocumento6 páginasInforme de OsciloscopioJheyson Quispe rojasAinda não há avaliações
- Ensayo IEEEDocumento4 páginasEnsayo IEEEcomar05Ainda não há avaliações
- Mantto. A Banco Capacitores EmergenciaDocumento3 páginasMantto. A Banco Capacitores EmergenciaRicardo Jimenez GAinda não há avaliações
- Temario Diagnóstico Electrónico CR - CRCHILEDocumento5 páginasTemario Diagnóstico Electrónico CR - CRCHILEEduardomg Garage MecanicAinda não há avaliações
- Qué Es Un Variador de VelocidadDocumento5 páginasQué Es Un Variador de VelocidadfelipeAinda não há avaliações
- Rep 01Documento9 páginasRep 01Raymundo SantanaAinda não há avaliações
- P64 ManualDocumento624 páginasP64 ManualLuis MorenoAinda não há avaliações
- Clase 11 - Amplificador Logarítmico y AntilogarítmicoDocumento14 páginasClase 11 - Amplificador Logarítmico y AntilogarítmicoSHERLYN ANDREA GUZMAN GRACIANOAinda não há avaliações
- LXT600 Spanish Owners ManualDocumento19 páginasLXT600 Spanish Owners ManualJosé VillaAinda não há avaliações