Você também pode gostar
- Homework-5 Root Locus-SOLUTIONSDocumento17 páginasHomework-5 Root Locus-SOLUTIONSzakir abbasAinda não há avaliações
- Solving ODEs with Laplace Transform in MatlabDocumento4 páginasSolving ODEs with Laplace Transform in MatlabLachlanOsmotherlyAinda não há avaliações
- Laplace Transforms and Its Applications: Unit-IiiDocumento68 páginasLaplace Transforms and Its Applications: Unit-IiiDiwakar ChauhanAinda não há avaliações
- Laplace Transforms of Unit Step and Shifting FunctionsDocumento14 páginasLaplace Transforms of Unit Step and Shifting FunctionsazrinaishakAinda não há avaliações
- Mathcad - Example of Using Laplace Transforms To Solve An ODEDocumento3 páginasMathcad - Example of Using Laplace Transforms To Solve An ODEOm GomaseAinda não há avaliações
- CHEN3005 Process Instrumentation and ControlDocumento4 páginasCHEN3005 Process Instrumentation and ControlVincent Ys TanAinda não há avaliações
- 10 Root LocusDocumento13 páginas10 Root LocusAhmed Tanveer Ashraff100% (1)
- Mathematical Model of SOFC (Solid Oxide Fuel Cell) For Power Plant SimulationsDocumento7 páginasMathematical Model of SOFC (Solid Oxide Fuel Cell) For Power Plant SimulationsErwin Zavalla OchoaAinda não há avaliações
- Humidity & Temperature Controller Pro.Documento41 páginasHumidity & Temperature Controller Pro.Amir WagdarikarAinda não há avaliações
- Ch11-Dynamic Behavior & Stability of Closed-Loop Control System.Documento15 páginasCh11-Dynamic Behavior & Stability of Closed-Loop Control System.Mark GoodmoreAinda não há avaliações
- STM32F30xx-31xx Standard Peripheral Library UM1581Documento584 páginasSTM32F30xx-31xx Standard Peripheral Library UM1581John LeungAinda não há avaliações
- Carbon Nanotubes PresentationDocumento11 páginasCarbon Nanotubes PresentationrajualagAinda não há avaliações
- Process Description of MtbeDocumento3 páginasProcess Description of Mtbeiszhani11Ainda não há avaliações
- Process Control Exam Review0.1830.43640.58850.61860.93675.1831. The integral term of the controller at t=6 min is(mA)Response No.Response0010.08820.1830.43640.58850.61860.93675.18Documento9 páginasProcess Control Exam Review0.1830.43640.58850.61860.93675.1831. The integral term of the controller at t=6 min is(mA)Response No.Response0010.08820.1830.43640.58850.61860.93675.18Kalmah3636Ainda não há avaliações
- Programming in CDocumento56 páginasProgramming in CJazz Virak100% (1)
- Solutions Set 6Documento19 páginasSolutions Set 6Augustine BrockAinda não há avaliações
- Fluidos Cap4Documento50 páginasFluidos Cap4SebastianKornejoAinda não há avaliações
- ENGR 6951: Automatic Control Engineering Supplementary Notes On Stability AnalysisDocumento5 páginasENGR 6951: Automatic Control Engineering Supplementary Notes On Stability AnalysisTharakaKaushalyaAinda não há avaliações
- Project Review On Production of AcroleinDocumento19 páginasProject Review On Production of Acroleinasrahaman9Ainda não há avaliações
- Prob 01Documento12 páginasProb 01Ahmad SayyedahmadAinda não há avaliações
- Assignment 2 CFMDocumento1 páginaAssignment 2 CFMChirag Jha100% (1)
- Energy Balance in A Solid Oxide Fuel CellDocumento8 páginasEnergy Balance in A Solid Oxide Fuel CellAshik AhmedAinda não há avaliações
- CRE1 Fogler 1 Mole Balances Reactors 2016Documento56 páginasCRE1 Fogler 1 Mole Balances Reactors 2016Rathish RagooAinda não há avaliações
- Process Motion and Control PDFDocumento8 páginasProcess Motion and Control PDFVaibhav SharmaAinda não há avaliações
- Carbon NanotubesDocumento41 páginasCarbon Nanotubes2018 01403Ainda não há avaliações
- Siemens PLC: Chapter FiveDocumento25 páginasSiemens PLC: Chapter FiveplcmanaAinda não há avaliações
- Cascade ControlDocumento17 páginasCascade Controlمحمد سلامAinda não há avaliações
- Root Locus Method 2Documento33 páginasRoot Locus Method 2Umasankar ChilumuriAinda não há avaliações
- Energy balance on chemical reactorsDocumento41 páginasEnergy balance on chemical reactorsHotib PerwiraAinda não há avaliações
- Process Dynamics and ControlDocumento7 páginasProcess Dynamics and ControlTitilope Oreoluwa MorolariAinda não há avaliações
- Final exam model B (Twintich) questionsDocumento2 páginasFinal exam model B (Twintich) questionsإسماعيل الرجامي0% (2)
- First Order SystemDocumento21 páginasFirst Order SystemNiranjan BeheraAinda não há avaliações
- Homework 2: U KQ Where:u Btu H FT Q FT H K ConstantDocumento6 páginasHomework 2: U KQ Where:u Btu H FT Q FT H K ConstantkatelynAinda não há avaliações
- Advanced Polymer TechnologyDocumento4 páginasAdvanced Polymer Technologykhoa chauAinda não há avaliações
- Temperature Sensing/Monitoring Using Lm35 & Atmega8Documento6 páginasTemperature Sensing/Monitoring Using Lm35 & Atmega8Suket75% (4)
- EI6702-Logic and Distributed Control System PDFDocumento15 páginasEI6702-Logic and Distributed Control System PDFlionelprakzy100% (1)
- Plug Flow ReactorDocumento8 páginasPlug Flow ReactorJeresse PelarejaAinda não há avaliações
- Lecture MSW and BMW ManagementDocumento114 páginasLecture MSW and BMW ManagementAnand Lalwani100% (1)
- SEMINAR REPORT PXFGDF PDFDocumento28 páginasSEMINAR REPORT PXFGDF PDFVijayKumar KindriAinda não há avaliações
- Source. The Key To Oscillator Operation Is Positive Feedback. A Positive FeedbackDocumento11 páginasSource. The Key To Oscillator Operation Is Positive Feedback. A Positive FeedbackDrLaxya Singla100% (1)
- 1 Introduction in LabVIEWDocumento21 páginas1 Introduction in LabVIEWMaxim MaranciucAinda não há avaliações
- RCMDocumento15 páginasRCMAdzamAinda não há avaliações
- University Malaya: KKEK 3156 Plant EngineeringDocumento10 páginasUniversity Malaya: KKEK 3156 Plant EngineeringJoeAinda não há avaliações
- CN4223R Microelectronics Thin Film Cleaning TechnologyDocumento16 páginasCN4223R Microelectronics Thin Film Cleaning TechnologyJohnAinda não há avaliações
- WEEK 6 MODULE 6 - Multivariable Control - NEWDocumento106 páginasWEEK 6 MODULE 6 - Multivariable Control - NEWmutencoAinda não há avaliações
- Proteus VSMDocumento2 páginasProteus VSMbouje72Ainda não há avaliações
- Mat Lab PresentationDocumento6 páginasMat Lab PresentationShivamAinda não há avaliações
- Carbon Disulfide Production Via Hydrogen Sulfide Methane ReformationDocumento4 páginasCarbon Disulfide Production Via Hydrogen Sulfide Methane ReformationakshayAinda não há avaliações
- IUPAC Name: AzaneDocumento7 páginasIUPAC Name: Azaneمحمد خليلAinda não há avaliações
- LECTURE - 04 - CDB 3044 - Conceptual Process Design - Synthesis of Reaction System (II)Documento36 páginasLECTURE - 04 - CDB 3044 - Conceptual Process Design - Synthesis of Reaction System (II)Ong Jia YeeAinda não há avaliações
- 12 Ijsrm PDFDocumento6 páginas12 Ijsrm PDF12343567890Ainda não há avaliações
- Linear and Quadratic Programming ExamplesDocumento14 páginasLinear and Quadratic Programming ExamplesMiNiTexasAinda não há avaliações
- Multivariable Control SystemDocumento39 páginasMultivariable Control SystemAmeerRashidAinda não há avaliações
- Syllabus - 15EC202 Electronic CircuitsDocumento3 páginasSyllabus - 15EC202 Electronic CircuitspH0% (1)
- Step 1: Calculate The LMTD: HOT ColdDocumento34 páginasStep 1: Calculate The LMTD: HOT ColdFrancisca Hanna0% (2)
- PIC18F4550 I2C - PIC ControllersDocumento8 páginasPIC18F4550 I2C - PIC ControllersKrishanu Modak100% (1)
- JacobianDocumento3 páginasJacobianAtse Dida Eyes0% (1)
- Active Disturbance Rejection Control for Nonlinear Systems: An IntroductionNo EverandActive Disturbance Rejection Control for Nonlinear Systems: An IntroductionAinda não há avaliações
- New Sensors and Processing ChainNo EverandNew Sensors and Processing ChainJean-Hugh ThomasAinda não há avaliações
- Deep Learning To Estimate Lithium-Ion Battery State of Health Without Additional Degradation ExperimentsDocumento13 páginasDeep Learning To Estimate Lithium-Ion Battery State of Health Without Additional Degradation ExperimentsJustin Zhenxing ZhangAinda não há avaliações
- LECTURER (PGDEEE - Chapter 2)Documento24 páginasLECTURER (PGDEEE - Chapter 2)Nuraddeen MagajiAinda não há avaliações
- Final: Bayero University, Kano Faculty of EngineeringDocumento12 páginasFinal: Bayero University, Kano Faculty of EngineeringNuraddeen MagajiAinda não há avaliações
- Factors Affecting Mechanical Design of Overhead LinesDocumento3 páginasFactors Affecting Mechanical Design of Overhead LinesNuraddeen MagajiAinda não há avaliações
- State SpaceDocumento51 páginasState SpaceJaol1976Ainda não há avaliações
- Radial Power System & FACTS Devices: Final ExamDocumento22 páginasRadial Power System & FACTS Devices: Final ExamNuraddeen MagajiAinda não há avaliações
- Design and Simulation of A Three-Phase Induction MDocumento8 páginasDesign and Simulation of A Three-Phase Induction M14 5Ainda não há avaliações
- SHAFTDocumento1 páginaSHAFTNuraddeen MagajiAinda não há avaliações
- Frequency ScanningDocumento3 páginasFrequency ScanningNuraddeen MagajiAinda não há avaliações
- Control and Planning of Multi-Terminal HVDC Transmission SystemsDocumento125 páginasControl and Planning of Multi-Terminal HVDC Transmission SystemsNuraddeen MagajiAinda não há avaliações
- Guidelines For Overhead Line DesignDocumento20 páginasGuidelines For Overhead Line Designmrasdan100% (1)
- Applications: Speed and Torque Control: 1-1 HistoryDocumento5 páginasApplications: Speed and Torque Control: 1-1 HistoryNuraddeen MagajiAinda não há avaliações
- Power System Transmission and Security: DR Nuraddeen MagajiDocumento68 páginasPower System Transmission and Security: DR Nuraddeen MagajiNuraddeen MagajiAinda não há avaliações
- Chapter 2 (ELE 8317 - 18)Documento33 páginasChapter 2 (ELE 8317 - 18)Nuraddeen MagajiAinda não há avaliações
- Syllabus of ELE 7208Documento1 páginaSyllabus of ELE 7208Nuraddeen MagajiAinda não há avaliações
- Chapter 3 (LECTURER - 4'-Overvoltage)Documento9 páginasChapter 3 (LECTURER - 4'-Overvoltage)Nuraddeen MagajiAinda não há avaliações
- LECTURER (PGDEEE - Chapter 2)Documento24 páginasLECTURER (PGDEEE - Chapter 2)Nuraddeen MagajiAinda não há avaliações
- ASSIGNMENT ELE 7208 Advanced High Voltage Enginering: Chapter Per StudentDocumento3 páginasASSIGNMENT ELE 7208 Advanced High Voltage Enginering: Chapter Per StudentNuraddeen MagajiAinda não há avaliações
- ELE 7208 High Voltage Engineering: BY Nuraddeen Magaji Dept. of Electrical BukDocumento36 páginasELE 7208 High Voltage Engineering: BY Nuraddeen Magaji Dept. of Electrical BukNuraddeen MagajiAinda não há avaliações
- Massachusetts Institute of Technology: Please AskDocumento18 páginasMassachusetts Institute of Technology: Please AskNuraddeen MagajiAinda não há avaliações
- Chapter 1 - 20Documento46 páginasChapter 1 - 20Nuraddeen MagajiAinda não há avaliações
- Massachusetts Institute of Technology: Please AskDocumento18 páginasMassachusetts Institute of Technology: Please AskNuraddeen MagajiAinda não há avaliações
- 1 Ele5205Documento9 páginas1 Ele5205Nuraddeen MagajiAinda não há avaliações
- Chapter 5Documento20 páginasChapter 5Nuraddeen MagajiAinda não há avaliações
- Prof N. Magaji: ELE8301 Engineering Mathematics SyllabusDocumento49 páginasProf N. Magaji: ELE8301 Engineering Mathematics SyllabusNuraddeen MagajiAinda não há avaliações
- 37 ADocumento11 páginas37 Amlaura2Ainda não há avaliações
- Chapter 1 21Documento61 páginasChapter 1 21Nuraddeen MagajiAinda não há avaliações
- Chapter 1 - 20Documento46 páginasChapter 1 - 20Nuraddeen MagajiAinda não há avaliações
- NMMMDocumento4 páginasNMMMNuraddeen MagajiAinda não há avaliações
- First-Order Filters ExplainedDocumento6 páginasFirst-Order Filters ExplainedNuraddeen MagajiAinda não há avaliações
- AI - Artificial Intelligence Program Brochure by Weschool, Bangalore (Welingkar Management Institute)Documento9 páginasAI - Artificial Intelligence Program Brochure by Weschool, Bangalore (Welingkar Management Institute)WeSchool BangaloreAinda não há avaliações
- Acceleration and braking performance factorsDocumento115 páginasAcceleration and braking performance factorsSivateja NallamothuAinda não há avaliações
- Exp SrilankaDocumento10 páginasExp SrilankaAnthony Kabuga100% (1)
- Corporate Corona Competence: True Output Power DisplayDocumento2 páginasCorporate Corona Competence: True Output Power DisplaySantosh Kadam100% (1)
- Guidelines For Health Check Report: 1. Cover PageDocumento6 páginasGuidelines For Health Check Report: 1. Cover Pageanon_516655412Ainda não há avaliações
- Air Flow Analysis For Electrical Motor'S Cooling System With Autodesk Simulation CFD 2013 ProgramDocumento4 páginasAir Flow Analysis For Electrical Motor'S Cooling System With Autodesk Simulation CFD 2013 ProgramNicolás Reyes GonzálezAinda não há avaliações
- Bus Station Design ElementsDocumento31 páginasBus Station Design ElementsRapha RachoAinda não há avaliações
- Structured Cataalists and Reactors Ceramic CatalistDocumento55 páginasStructured Cataalists and Reactors Ceramic CatalistBoby Royan Naira AzdlilAinda não há avaliações
- Aircraft Wiring and Bonding-Completo PDFDocumento416 páginasAircraft Wiring and Bonding-Completo PDFDAVID FAJARDO PUERTOAinda não há avaliações
- Relay - 8aDocumento2 páginasRelay - 8aFrans Giovani Quispe DiazAinda não há avaliações
- Split Type Air Conditioner Specifications and Installation ManualDocumento34 páginasSplit Type Air Conditioner Specifications and Installation ManualMihaela CaciumarciucAinda não há avaliações
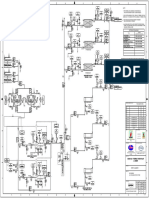
- SH1 Dhi P1PCB M M01 Pid 5325Documento1 páginaSH1 Dhi P1PCB M M01 Pid 5325Thanh SonAinda não há avaliações
- SJ 700 ADocumento127 páginasSJ 700 APaul MartinAinda não há avaliações
- CDJ 100SDocumento28 páginasCDJ 100SMarcos ZanelliAinda não há avaliações
- 1 D 713224192Documento1 página1 D 713224192Jaganathan KrishnanAinda não há avaliações
- 05-Coke Drum DesignDocumento9 páginas05-Coke Drum DesignGeorge J AlukkalAinda não há avaliações
- Service Service Manual Manual: Onan Generator Set For MarineDocumento204 páginasService Service Manual Manual: Onan Generator Set For MarinenajeebabdulkadarAinda não há avaliações
- Inconel 82 PDFDocumento1 páginaInconel 82 PDFMiguel MorenoAinda não há avaliações
- brw02 08 NGV Natural Gas Break Away Staubli en PDFDocumento4 páginasbrw02 08 NGV Natural Gas Break Away Staubli en PDFhendntdAinda não há avaliações
- YALE (A909) GDP175VX36 LIFT TRUCK Service Repair Manual PDFDocumento23 páginasYALE (A909) GDP175VX36 LIFT TRUCK Service Repair Manual PDFjkdmsmemmdAinda não há avaliações
- CCV Databook (15.04.2011)Documento50 páginasCCV Databook (15.04.2011)Hasan WanandiAinda não há avaliações
- The Italian Restaurant Print 1Documento6 páginasThe Italian Restaurant Print 1Leahu DanielAinda não há avaliações
- Fenwick Elliott in The Middle East & North AfricaDocumento3 páginasFenwick Elliott in The Middle East & North AfricahymerchmidtAinda não há avaliações
- Brochure of ICM'10Documento38 páginasBrochure of ICM'10Sherif EltoukhiAinda não há avaliações
- Material Science: Ceramics Properties and ApplicationsDocumento122 páginasMaterial Science: Ceramics Properties and ApplicationstheoAinda não há avaliações
- D45 CatDocumento5 páginasD45 CatJiménez ManuelAinda não há avaliações
- Longitudinal detail section 1-1Documento3 páginasLongitudinal detail section 1-1Mwesigwa DanielAinda não há avaliações
- M20tnpoh PDFDocumento240 páginasM20tnpoh PDFPolkaboy2Ainda não há avaliações
- Living Etc, November 2020Documento3 páginasLiving Etc, November 2020Juliet BenningAinda não há avaliações
- Gas Conditioning & Processing - GLOMACSDocumento5 páginasGas Conditioning & Processing - GLOMACSCHO ACHIRI HUMPHREYAinda não há avaliações