Você também pode gostar
- Preguntas RedesDocumento1 páginaPreguntas RedesAndresAinda não há avaliações
- PRIMERAS EvaluacionesDocumento6 páginasPRIMERAS EvaluacionesAndresAinda não há avaliações
- ImportanteDocumento1 páginaImportanteAndresAinda não há avaliações
- AjedrezDocumento1 páginaAjedrezAndresAinda não há avaliações
- Curso Microcontroladores AVR-ATMELDocumento66 páginasCurso Microcontroladores AVR-ATMELSherma007100% (1)
- 02 TareaDocumento1 página02 TareaAndresAinda não há avaliações
- 01 VIsDocumento14 páginas01 VIsCarlosAndresAinda não há avaliações
- Conclusion EsDocumento1 páginaConclusion EsAndresAinda não há avaliações
- Informacion!!Documento1 páginaInformacion!!AndresAinda não há avaliações
- INSTRUDocumento6 páginasINSTRUAndresAinda não há avaliações
- Informe Proyecto 2do Parcial MicroDocumento23 páginasInforme Proyecto 2do Parcial MicroAndresAinda não há avaliações
- Formato GuiasDocumento1 páginaFormato GuiasAndresAinda não há avaliações
- Impresora Capitulo 4 y 5Documento20 páginasImpresora Capitulo 4 y 5AndresAinda não há avaliações
- TransformadorDocumento3 páginasTransformadorAndresAinda não há avaliações
- Motores y SensoresDocumento30 páginasMotores y SensoresPablo Andrés100% (3)
- Bien 2Documento3 páginasBien 2AndresAinda não há avaliações
- Laboratorio # 3 Construccion de Un Circuito Eléctrico ParaleloDocumento3 páginasLaboratorio # 3 Construccion de Un Circuito Eléctrico Paraleloyency89100% (4)
- Unidad N1 Informe. Ajustes ContablesDocumento10 páginasUnidad N1 Informe. Ajustes ContablesRoxandry Vivas DeviaAinda não há avaliações
- Anestesia Caudal en NeonatosDocumento4 páginasAnestesia Caudal en NeonatosAbisaid Jonathan Salinas MemijeAinda não há avaliações
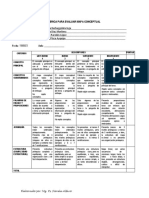
- SEMANA 1 - Mapa ConceptualDocumento2 páginasSEMANA 1 - Mapa ConceptualConnie :pAinda não há avaliações
- Especialidad de Letreros y Carteles Universidad Del ConquistadorDocumento3 páginasEspecialidad de Letreros y Carteles Universidad Del ConquistadorArud PoloAinda não há avaliações
- Elme Kia Sportage 95+Documento1 páginaElme Kia Sportage 95+Ing. Alejandro NarvaezAinda não há avaliações
- Preoperacional Compactador (Canguro-Rana)Documento1 páginaPreoperacional Compactador (Canguro-Rana)alfa mikeAinda não há avaliações
- Química T-1Documento32 páginasQuímica T-1Luz Sarai Urizar GonzálezAinda não há avaliações
- Ensayo Evolucion RegresivaDocumento3 páginasEnsayo Evolucion RegresivaJosé Florez100% (1)
- Carta Declaracion JuradaDocumento2 páginasCarta Declaracion JuradaJuan Carlos Carrasco GarciaAinda não há avaliações
- Ica0 p5 2 Plan DocenteDocumento29 páginasIca0 p5 2 Plan DocenteAlbert Ibáñez GonzálezAinda não há avaliações
- Presupuesto Asado Al Plato - Echi CoulterDocumento3 páginasPresupuesto Asado Al Plato - Echi CoulterKucas CarpenAinda não há avaliações
- Monografia TuberculosisDocumento5 páginasMonografia TuberculosisBryan EsparzaAinda não há avaliações
- Clase 12 - Taller de GradoDocumento63 páginasClase 12 - Taller de GradochinchulinAinda não há avaliações
- TesisDocumento113 páginasTesismehida_3Ainda não há avaliações
- Principales Enfermedades Del Cultivo de Camu Camu y Su ControlDocumento7 páginasPrincipales Enfermedades Del Cultivo de Camu Camu y Su ControlRossana CalisayaAinda não há avaliações
- Rubrica TA4Documento87 páginasRubrica TA4Deslin Mera HernandezAinda não há avaliações
- Herramientas de Inteligencia Comercial PDFDocumento40 páginasHerramientas de Inteligencia Comercial PDFnayshaAinda não há avaliações
- Actividades de TrigonometrÍaDocumento1 páginaActividades de TrigonometrÍasalonsosanz100% (1)
- Asamblea Extraordinaria Cambio de Dirección, Objeto y Aumento de Capital EL AMATILLODocumento6 páginasAsamblea Extraordinaria Cambio de Dirección, Objeto y Aumento de Capital EL AMATILLOheidy urrutiaAinda não há avaliações
- Ensayo Sobre Las Propiedades de Los Signos.Documento6 páginasEnsayo Sobre Las Propiedades de Los Signos.Oscar AritaAinda não há avaliações
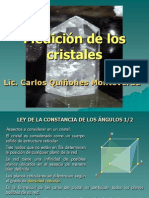
- Medición de Los CristalesDocumento25 páginasMedición de Los CristalesRonald Richard Quiliche GalvezAinda não há avaliações
- Proyecto Olimpiadas HistoriaDocumento6 páginasProyecto Olimpiadas HistoriaLorena Arenas LopezAinda não há avaliações
- 10 Cualidades Del Emprendedor ExitosoDocumento13 páginas10 Cualidades Del Emprendedor ExitosoMuroni Vladimir CondeAinda não há avaliações
- DPC For 001 Transmittal BravanteDocumento17 páginasDPC For 001 Transmittal BravanteLUISA RICOAinda não há avaliações
- Los Sistemas Operativos: Presentado Por: Felipe Delgado RodriguezDocumento18 páginasLos Sistemas Operativos: Presentado Por: Felipe Delgado RodriguezFelipe DelgadoAinda não há avaliações
- Deber Tecnicas de FactoreoDocumento10 páginasDeber Tecnicas de FactoreoNormaElenaVeraPalaciosAinda não há avaliações
- Tweeen Clean 2205Documento4 páginasTweeen Clean 2205Arslan HussainAinda não há avaliações
- Fundamentos de Gestion EmpresarialDocumento8 páginasFundamentos de Gestion EmpresarialkarlaAinda não há avaliações
- DC DC SubirDocumento48 páginasDC DC SubirGabrielmatius GaboAinda não há avaliações