Você também pode gostar
- NR-Power FlowDocumento19 páginasNR-Power Flowandres felipe morenoAinda não há avaliações
- Load Flow 2Documento23 páginasLoad Flow 2Fawzi RadwanAinda não há avaliações
- NR Application To Power FlowDocumento23 páginasNR Application To Power FlowFawzi RadwanAinda não há avaliações
- Newton Raphson MethodDocumento22 páginasNewton Raphson MethodSachinAinda não há avaliações
- NR Application To Power FlowDocumento17 páginasNR Application To Power FlowSrinivas YelisettiAinda não há avaliações
- Lecture 12Documento33 páginasLecture 12Jaafar AbbakarAinda não há avaliações
- ECE 476 Power System AnalysisDocumento38 páginasECE 476 Power System AnalysisFady MichealAinda não há avaliações
- ECE4762011 Lect14Documento46 páginasECE4762011 Lect14Ravi TejaAinda não há avaliações
- Newton Raphson MethodDocumento33 páginasNewton Raphson MethodAnnan_Faridi_517Ainda não há avaliações
- Newton-Raphson Method To Solve Load Flow Equation in Power SystemDocumento8 páginasNewton-Raphson Method To Solve Load Flow Equation in Power SystemNazmul IslamAinda não há avaliações
- Lecture 4: Power Flow: Prof. Tom Overbye Dept. of Electrical and Computer Engineering Texas A&M UniversityDocumento45 páginasLecture 4: Power Flow: Prof. Tom Overbye Dept. of Electrical and Computer Engineering Texas A&M UniversityManuelAinda não há avaliações
- Power System AnalysisDocumento33 páginasPower System AnalysisAnikendu MaitraAinda não há avaliações
- N-R BasicsDocumento46 páginasN-R BasicsHossain 'Soroosh' MohammadiAinda não há avaliações
- Power System Analysis: Newton-Raphson Power FlowDocumento44 páginasPower System Analysis: Newton-Raphson Power FlowPenny87Ainda não há avaliações
- Newton Raphson MetodDocumento27 páginasNewton Raphson MetodAnonymous fBjdRyyAinda não há avaliações
- The DC Power Flow EquationsDocumento25 páginasThe DC Power Flow EquationsDaryAntoAinda não há avaliações
- The DC Power Flow EquationsDocumento22 páginasThe DC Power Flow EquationsPeter JumreAinda não há avaliações
- Et M Zulassungspruefung PDFDocumento5 páginasEt M Zulassungspruefung PDFmuhammad bilalAinda não há avaliações
- ECE530 - Fall2013 - Lect5 (SLAJDOVI 23,24,25)Documento42 páginasECE530 - Fall2013 - Lect5 (SLAJDOVI 23,24,25)Alen SuljicAinda não há avaliações
- Transmission Line: Prof. M M SharmaDocumento28 páginasTransmission Line: Prof. M M SharmaJaiverdhanAinda não há avaliações
- Quantum Physics I (8.04) Spring 2016 Assignment 8: Problem Set 8Documento5 páginasQuantum Physics I (8.04) Spring 2016 Assignment 8: Problem Set 8Fabian M Vargas FontalvoAinda não há avaliações
- 11 MOS Field-Effect TransistorsDocumento61 páginas11 MOS Field-Effect Transistors陳浚維Ainda não há avaliações
- Koorwinder Root SystDocumento17 páginasKoorwinder Root SystLiliana ForzaniAinda não há avaliações
- Mathematics For Physics 2023. Chapter 2Documento39 páginasMathematics For Physics 2023. Chapter 2Tuyết VânAinda não há avaliações
- ECE4762011 Lect12Documento32 páginasECE4762011 Lect12Jesse VenzorAinda não há avaliações
- ECE 476 Power System AnalysisDocumento36 páginasECE 476 Power System AnalysisFady MichealAinda não há avaliações
- Divyanshu Prakash: Mewar University, ChittorgarhDocumento27 páginasDivyanshu Prakash: Mewar University, ChittorgarhsitakantasamantarayAinda não há avaliações
- Wave Analysis of LineDocumento31 páginasWave Analysis of LineSYAHRINA MEILANI hoamAinda não há avaliações
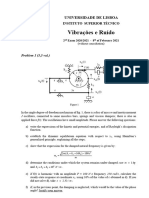
- Exam Vibrations and NoiseDocumento5 páginasExam Vibrations and NoisejoaoftabreuAinda não há avaliações
- GAMBLR: Gibbs Annealing For Multiway Bayesian Linear RegressionsDocumento8 páginasGAMBLR: Gibbs Annealing For Multiway Bayesian Linear RegressionsJohn ValjohnAinda não há avaliações
- Homework 1: Exercise 2Documento2 páginasHomework 1: Exercise 2Youssef KamounAinda não há avaliações
- Power Flow AlgorithmDocumento17 páginasPower Flow AlgorithmRohit VermaAinda não há avaliações
- Frequency CalculationsDocumento9 páginasFrequency CalculationsludihemicarAinda não há avaliações
- Exercise 6: Probability and Random Processes For Signals and SystemsDocumento2 páginasExercise 6: Probability and Random Processes For Signals and SystemsGpAinda não há avaliações
- Aerodynamics Characteristic of Airfoil Using Panel Method-Constant Strength Doublet With Neumann Boundary ConditionDocumento22 páginasAerodynamics Characteristic of Airfoil Using Panel Method-Constant Strength Doublet With Neumann Boundary ConditionBuyung JunaidinAinda não há avaliações
- ECE 476 Power System AnalysisDocumento35 páginasECE 476 Power System AnalysisFady MichealAinda não há avaliações
- The Discrete Wavelet Transform For Image CompressionDocumento26 páginasThe Discrete Wavelet Transform For Image CompressionRavinder Pal Singh HarryAinda não há avaliações
- Tutorial 4Documento9 páginasTutorial 4Jabin XingAinda não há avaliações
- ECE4762011 Lect14Documento46 páginasECE4762011 Lect14selvan90Ainda não há avaliações
- Dyadic Wavelets and Refinable Functions On A Half-LineDocumento30 páginasDyadic Wavelets and Refinable Functions On A Half-LineukoszapavlinjeAinda não há avaliações
- Impurity Scattering in Graphene Nano RibbonDocumento5 páginasImpurity Scattering in Graphene Nano RibbonArun NissimagoudarAinda não há avaliações
- Using The Green's Function Method To Analyse The Response of An Infinite Wire On Visco-Elastic Foundationn N Visco-ElasticDocumento4 páginasUsing The Green's Function Method To Analyse The Response of An Infinite Wire On Visco-Elastic Foundationn N Visco-ElasticTraian MaziluAinda não há avaliações
- Curso: Ing. Moisés Ventosilla ZevallosDocumento40 páginasCurso: Ing. Moisés Ventosilla ZevallosJorge Antonio Santana SánchezAinda não há avaliações
- Solutions of Week 7 Assignment 1: Ans - (C)Documento4 páginasSolutions of Week 7 Assignment 1: Ans - (C)Pankaj RupaniAinda não há avaliações
- n n π ~ 2maDocumento3 páginasn n π ~ 2maHenry LauAinda não há avaliações
- Lecture 13Documento29 páginasLecture 13Andrew GoulderAinda não há avaliações
- A Microscopic Model of Resonant Double-Barrier Tunneling in A Quantum SystemDocumento25 páginasA Microscopic Model of Resonant Double-Barrier Tunneling in A Quantum SystemIbnu SholehanAinda não há avaliações
- Asset-V1 BuX+EEE321+2021 Summer+Type@Asset+Block@Fault Current Transient On Transmission LineDocumento16 páginasAsset-V1 BuX+EEE321+2021 Summer+Type@Asset+Block@Fault Current Transient On Transmission LineAbrar ChowdhuryAinda não há avaliações
- BQP vs. P, BPP, Accuracy 1 Reversible Computation: CS 294-2 9/14/04 Fall 2004Documento6 páginasBQP vs. P, BPP, Accuracy 1 Reversible Computation: CS 294-2 9/14/04 Fall 2004Marcos BenícioAinda não há avaliações
- Modelling of LinesDocumento31 páginasModelling of Linesdwarakesh14Ainda não há avaliações
- DC AnalysisDocumento27 páginasDC AnalysisJr CallangaAinda não há avaliações
- Exam Vibrations and NoiseDocumento6 páginasExam Vibrations and NoisejoaoftabreuAinda não há avaliações
- Boundary Value ProblemsDocumento15 páginasBoundary Value ProblemsShadman Saqlain Rahman, 170021057Ainda não há avaliações
- Chapter 2Documento22 páginasChapter 2villianAinda não há avaliações
- Msphdsamplesq Ee2 PDFDocumento5 páginasMsphdsamplesq Ee2 PDFbibiAinda não há avaliações
- Spectre Tolerance SettingsDocumento49 páginasSpectre Tolerance SettingsLaxmeesha NaikAinda não há avaliações
- Pull inDocumento11 páginasPull inDIPEN VADALIAAinda não há avaliações
- ECE333 Renewable Energy Systems 2015 Lect14Documento43 páginasECE333 Renewable Energy Systems 2015 Lect14rdelgranadoAinda não há avaliações
- Green's Function Estimates for Lattice Schrödinger Operators and Applications. (AM-158)No EverandGreen's Function Estimates for Lattice Schrödinger Operators and Applications. (AM-158)Ainda não há avaliações
- ECE 421 Session 12: Utility SCADA and AutomationDocumento40 páginasECE 421 Session 12: Utility SCADA and Automationrobertovm2002Ainda não há avaliações
- Half-Interval Method Applied in Feeder Terminal Unit Overcurrent Detecting Curve SettingDocumento8 páginasHalf-Interval Method Applied in Feeder Terminal Unit Overcurrent Detecting Curve Settingrobertovm2002Ainda não há avaliações
- Coordination For Motor Protection: High Performance MCCBDocumento4 páginasCoordination For Motor Protection: High Performance MCCBrobertovm2002Ainda não há avaliações
- ECP 11-0008 LV Cable Testing ProcedureDocumento9 páginasECP 11-0008 LV Cable Testing Procedurerobertovm2002Ainda não há avaliações
- 5 Motors Damage CurvesDocumento7 páginas5 Motors Damage Curvesrobertovm2002Ainda não há avaliações
- 3va Configuring Manual Selectivity en En-UsDocumento80 páginas3va Configuring Manual Selectivity en En-Usrobertovm2002Ainda não há avaliações
- 4.3 Anura PereraDocumento9 páginas4.3 Anura Pererarobertovm2002Ainda não há avaliações
- Literature Review On Relay Coordination Using Software TechniquesDocumento4 páginasLiterature Review On Relay Coordination Using Software Techniquesrobertovm2002Ainda não há avaliações
- GRD110 6F2S0754 4.1Documento246 páginasGRD110 6F2S0754 4.1robertovm2002Ainda não há avaliações
- 03 Protective Relays in The Power Delivery SystemDocumento43 páginas03 Protective Relays in The Power Delivery Systemrobertovm2002Ainda não há avaliações
- 6003 AspectsOvercurrent Web PDFDocumento8 páginas6003 AspectsOvercurrent Web PDFrobertovm2002Ainda não há avaliações
- Overcurrent Relays Coordination Using MATLAB Model: A. Akhikpemelo, M. J. E. Evbogbai and M. S. OkundamiyaDocumento8 páginasOvercurrent Relays Coordination Using MATLAB Model: A. Akhikpemelo, M. J. E. Evbogbai and M. S. Okundamiyarobertovm2002Ainda não há avaliações
- Set BDocumento12 páginasSet BDan CasuraoAinda não há avaliações
- CMG 100 New SyllabusDocumento3 páginasCMG 100 New SyllabusSakib NehalAinda não há avaliações
- Science 9 Q4 Module 5 WK 5 v.01 CC Released 29may2021Documento22 páginasScience 9 Q4 Module 5 WK 5 v.01 CC Released 29may2021Jecka FranciscoAinda não há avaliações
- Process Control and Instrumentation: B. Tech. Seventh Semester (Chemical Engineering) (C.B.S.)Documento2 páginasProcess Control and Instrumentation: B. Tech. Seventh Semester (Chemical Engineering) (C.B.S.)artiAinda não há avaliações
- Semiconductor Microwave Devices StuDocumento17 páginasSemiconductor Microwave Devices StuAdithyan JAinda não há avaliações
- Particlesreviseside 2Documento1 páginaParticlesreviseside 2fugzieAinda não há avaliações
- Hartree Fock TheoryDocumento56 páginasHartree Fock TheoryAli AhmedAinda não há avaliações
- Bomb Calorimeter Principle, Formula ProcedureDocumento8 páginasBomb Calorimeter Principle, Formula ProcedureJosue RamirezAinda não há avaliações
- Dual Ring Circular HIS Stacked Triple BandDocumento4 páginasDual Ring Circular HIS Stacked Triple BandTambor SiraitAinda não há avaliações
- Football SpeedDocumento2 páginasFootball SpeedTom HochhalterAinda não há avaliações
- Control DevicesDocumento19 páginasControl DevicesSuzaini SupingatAinda não há avaliações
- MYP Y5 Science OVERVIEWDocumento11 páginasMYP Y5 Science OVERVIEWjv peridoAinda não há avaliações
- Title: Enthalpy Objective: 1. To Determine The Enthalpy of Neutralization of Strong Acid and Strong BaseDocumento10 páginasTitle: Enthalpy Objective: 1. To Determine The Enthalpy of Neutralization of Strong Acid and Strong BaseAnonymous eGc6IFJc8GAinda não há avaliações
- Plastic Analysis 1011Documento129 páginasPlastic Analysis 1011F Azam Khan Ayon100% (1)
- School Grade Level Teacher Learning Area Teaching Dates QuarterDocumento42 páginasSchool Grade Level Teacher Learning Area Teaching Dates QuarterAngelica Beltran LazagaAinda não há avaliações
- Ingles Tecnico Ii ELI-300: Star-Delta StarterDocumento2 páginasIngles Tecnico Ii ELI-300: Star-Delta StarterEnrique Valdez JordanAinda não há avaliações
- Analysis and Design of A Surge TankDocumento7 páginasAnalysis and Design of A Surge TankUchirai Dede100% (3)
- VLS-PFE 5 Impulse and Momentum Activity SheetDocumento5 páginasVLS-PFE 5 Impulse and Momentum Activity SheetMohammadrayyan MacasindilAinda não há avaliações
- Plasma Physics: M. Sc. (Physics) Semester-III Unit - IV Interaction of Plasmas With Electron BeamDocumento29 páginasPlasma Physics: M. Sc. (Physics) Semester-III Unit - IV Interaction of Plasmas With Electron BeamAbhishekAinda não há avaliações
- Eddy Current Losses TurowskiDocumento6 páginasEddy Current Losses TurowskiHafsa IkramAinda não há avaliações
- Column Base Plate DesignDocumento4 páginasColumn Base Plate Design_jessecaAinda não há avaliações
- PhET Projectile Motion LabDocumento7 páginasPhET Projectile Motion LabMon AdanoAinda não há avaliações
- Ampacity Calculation For Case # 05Documento64 páginasAmpacity Calculation For Case # 05Erfan KhanAinda não há avaliações
- Damped Free VibrationDocumento6 páginasDamped Free Vibrationraffiq85Ainda não há avaliações
- NPTEL - Curso de Proteção de SistemasDocumento321 páginasNPTEL - Curso de Proteção de SistemasGianey Fernandes da SilvaAinda não há avaliações
- Calculation of Pipe Line Heat LossDocumento9 páginasCalculation of Pipe Line Heat LossradanpetricaAinda não há avaliações
- Ceramic Fiber HeatersDocumento22 páginasCeramic Fiber HeatersElias100% (1)
- Kuis No 1 PDFDocumento4 páginasKuis No 1 PDFAdhy KuncoroAinda não há avaliações
- Chapter 3 - SemiconductorDocumento49 páginasChapter 3 - SemiconductorBalqis yasin100% (1)