Você também pode gostar
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)No EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Nota: 4.5 de 5 estrelas4.5/5 (121)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryNo EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryNota: 3.5 de 5 estrelas3.5/5 (231)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaNo EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaNota: 4.5 de 5 estrelas4.5/5 (266)
- Never Split the Difference: Negotiating As If Your Life Depended On ItNo EverandNever Split the Difference: Negotiating As If Your Life Depended On ItNota: 4.5 de 5 estrelas4.5/5 (838)
- The Emperor of All Maladies: A Biography of CancerNo EverandThe Emperor of All Maladies: A Biography of CancerNota: 4.5 de 5 estrelas4.5/5 (271)
- The Little Book of Hygge: Danish Secrets to Happy LivingNo EverandThe Little Book of Hygge: Danish Secrets to Happy LivingNota: 3.5 de 5 estrelas3.5/5 (400)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeNo EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeNota: 4 de 5 estrelas4/5 (5794)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyNo EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyNota: 3.5 de 5 estrelas3.5/5 (2259)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreNo EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreNota: 4 de 5 estrelas4/5 (1090)
- Basic Electrical EngineeringDocumento17 páginasBasic Electrical EngineeringRovick TarifeAinda não há avaliações
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersNo EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersNota: 4.5 de 5 estrelas4.5/5 (345)
- Team of Rivals: The Political Genius of Abraham LincolnNo EverandTeam of Rivals: The Political Genius of Abraham LincolnNota: 4.5 de 5 estrelas4.5/5 (234)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceNo EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceNota: 4 de 5 estrelas4/5 (895)
- The Unwinding: An Inner History of the New AmericaNo EverandThe Unwinding: An Inner History of the New AmericaNota: 4 de 5 estrelas4/5 (45)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureNo EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureNota: 4.5 de 5 estrelas4.5/5 (474)
- Voltage Stability in Electrical Power SystemsDocumento33 páginasVoltage Stability in Electrical Power Systemsquangspkt100% (1)
- The Yellow House: A Memoir (2019 National Book Award Winner)No EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Nota: 4 de 5 estrelas4/5 (98)
- Ee 258 Load-Flow Studies: Lecturer: Ambrosio T. Magtajas Nod-Mso, NGCPDocumento33 páginasEe 258 Load-Flow Studies: Lecturer: Ambrosio T. Magtajas Nod-Mso, NGCPRovick Tarife67% (3)
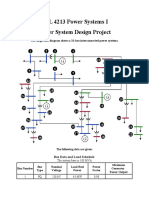
- Power System Design ProjectDocumento6 páginasPower System Design Projectvpzfaris0% (1)
- Power Evacuation ReportDocumento127 páginasPower Evacuation Reportjitendra100% (1)
- One-Line Diagram - Olv1: Page 1 18:00:54 Feb 08, 2018 Project File: Msuiit - OnelinediagramDocumento1 páginaOne-Line Diagram - Olv1: Page 1 18:00:54 Feb 08, 2018 Project File: Msuiit - OnelinediagramRovick TarifeAinda não há avaliações
- Power System Harmonic Analysis by Jos Arrillaga, Bruce C Smith, Neville R Watson and Alan R WoodDocumento383 páginasPower System Harmonic Analysis by Jos Arrillaga, Bruce C Smith, Neville R Watson and Alan R WoodLaura Morales Gutierres100% (1)
- 09 Energy ManagementDocumento44 páginas09 Energy ManagementRafael FurquimAinda não há avaliações
- EE 158 - Electrical System Design (LECTURE 1)Documento29 páginasEE 158 - Electrical System Design (LECTURE 1)Rovick Tarife0% (1)
- Matlab Toolbox PSATDocumento105 páginasMatlab Toolbox PSATLuis Isidro Jaimes Amaya0% (1)
- Https - Doc 08 74 Apps Viewer - Googleusercontent PDFDocumento381 páginasHttps - Doc 08 74 Apps Viewer - Googleusercontent PDFMárcio Augusto TamashiroAinda não há avaliações
- A Sensitivity Analysis of The Weather Research and Forecasting WRF Model For Finding Wind Resource PotentialDocumento5 páginasA Sensitivity Analysis of The Weather Research and Forecasting WRF Model For Finding Wind Resource PotentialRovick TarifeAinda não há avaliações
- MET Dynamics 06.30.2017 4-7pmDocumento49 páginasMET Dynamics 06.30.2017 4-7pmRovick TarifeAinda não há avaliações
- Boundary Value ProblemsDocumento82 páginasBoundary Value ProblemsRovick TarifeAinda não há avaliações
- Mod SimpyDocumento212 páginasMod SimpyRovick TarifeAinda não há avaliações
- Ee3015 PDFDocumento1 páginaEe3015 PDFRovick TarifeAinda não há avaliações
- The Elementary Path Problem: A DP SolutionDocumento8 páginasThe Elementary Path Problem: A DP SolutionRovick TarifeAinda não há avaliações
- Graphical Method Practice Problems: Subject ToDocumento5 páginasGraphical Method Practice Problems: Subject ToRovick TarifeAinda não há avaliações
- Unrestricted and Other Variable TypesDocumento3 páginasUnrestricted and Other Variable TypesRovick TarifeAinda não há avaliações
- IE 1081: Operations Research Fall 2010 Syllabus Basic InformationDocumento2 páginasIE 1081: Operations Research Fall 2010 Syllabus Basic InformationRovick TarifeAinda não há avaliações
- Transportation and Assignment ProblemDocumento67 páginasTransportation and Assignment ProblemRovick TarifeAinda não há avaliações
- EE 147 - Lecture 1Documento25 páginasEE 147 - Lecture 1Rovick TarifeAinda não há avaliações
- Power Flow Program Using MatlabDocumento11 páginasPower Flow Program Using MatlabSafnas KariapperAinda não há avaliações
- Inter Connected Power System - CombinedDocumento11 páginasInter Connected Power System - CombinedPalak AriwalaAinda não há avaliações
- A Combined Zone-3 Relay Blocking andDocumento8 páginasA Combined Zone-3 Relay Blocking andAvinash SarwadeAinda não há avaliações
- A Multi Phase Harmonic Load Flow Solution TechniqueDocumento9 páginasA Multi Phase Harmonic Load Flow Solution TechniquerameshpampanaAinda não há avaliações
- Ee1351 PsaDocumento16 páginasEe1351 PsaStephen Kenth La GuerreAinda não há avaliações
- 1-Intro - Review of Basic Tools 26716Documento39 páginas1-Intro - Review of Basic Tools 26716bilal nagoriAinda não há avaliações
- Power System Operation and ControlDocumento86 páginasPower System Operation and ControlvickyAinda não há avaliações
- Load FlowDocumento770 páginasLoad FlowS K PrajapatAinda não há avaliações
- A Three Phase Unbalanced Power Flow Method For Secondary Distribution System PDFDocumento6 páginasA Three Phase Unbalanced Power Flow Method For Secondary Distribution System PDFkishorebabAinda não há avaliações
- Neutral To Earth PDFDocumento5 páginasNeutral To Earth PDFGervasio SimaoAinda não há avaliações
- M.Tech - SRIT R23 - Syllabus - I SEMDocumento35 páginasM.Tech - SRIT R23 - Syllabus - I SEMpadmavathiAinda não há avaliações
- A Review On Load Flow Studies FinalDocumento46 páginasA Review On Load Flow Studies FinalTesfahun GirmaAinda não há avaliações
- rAREH Icon Solar LTD: Grid Connection StudyDocumento46 páginasrAREH Icon Solar LTD: Grid Connection StudyVishnu ShankerAinda não há avaliações
- Transient Stability Analysis of Nine Bus System With Multiple ContingenciesDocumento55 páginasTransient Stability Analysis of Nine Bus System With Multiple ContingenciesShashank Veerapaneni100% (1)
- PSA CO-PO MappingDocumento2 páginasPSA CO-PO MappingsankarsadaAinda não há avaliações
- 23.m.e. PSDocumento43 páginas23.m.e. PSJoyce JohnAinda não há avaliações
- Load Flow Analysis of Ieee 14 Bar Afet20221Documento24 páginasLoad Flow Analysis of Ieee 14 Bar Afet20221NjitnumAinda não há avaliações
- Four-Winding Transformer and Autotransformer Modeling For Load-Flow and Short-Circuit Analysis, Part II: ApplicationDocumento8 páginasFour-Winding Transformer and Autotransformer Modeling For Load-Flow and Short-Circuit Analysis, Part II: ApplicationudayakumartAinda não há avaliações
- Mewar University Chittorgarh - Power System EngineeringDocumento38 páginasMewar University Chittorgarh - Power System Engineeringnved01Ainda não há avaliações
- PSAT - Modeling of Shunt FACTS Devices For Voltage StabilityDocumento11 páginasPSAT - Modeling of Shunt FACTS Devices For Voltage StabilityShabbir Bohra100% (2)
- 10 11648 J Epes 20221104 12Documento8 páginas10 11648 J Epes 20221104 12yalew gebruAinda não há avaliações
- Islanding of 24-Bus IEEE Reliability Test SystemDocumento16 páginasIslanding of 24-Bus IEEE Reliability Test SystemRahul_KittuAinda não há avaliações
- PSA Unit 1Documento26 páginasPSA Unit 1sravanAinda não há avaliações