Você também pode gostar
- Guest Lecture: DC and AC Motor DrivesDocumento38 páginasGuest Lecture: DC and AC Motor DrivesveenaAinda não há avaliações
- Power Semi Conductor DrivesDocumento38 páginasPower Semi Conductor Drivesdeepu4303Ainda não há avaliações
- DC Motor Drives: by John Wiley & Sons, Inc. Chapter 2 Power Semiconductor Switches: An Overview 2-1 2-1Documento29 páginasDC Motor Drives: by John Wiley & Sons, Inc. Chapter 2 Power Semiconductor Switches: An Overview 2-1 2-1JordiAinda não há avaliações
- PSD..UNIT 3..motor DrivesDocumento38 páginasPSD..UNIT 3..motor Drivessatish reddyAinda não há avaliações
- DC Motor Drives: by John Wiley & Sons, Inc. Chapter 2 Power Semiconductor Switches: An Overview 2-1 2-1Documento21 páginasDC Motor Drives: by John Wiley & Sons, Inc. Chapter 2 Power Semiconductor Switches: An Overview 2-1 2-1Abir LovesickAinda não há avaliações
- DC and AC Motor Drives: by John Wiley & Sons, Inc. Chapter 2 Power Semiconductor Switches: An Overview 2-1 2-1Documento11 páginasDC and AC Motor Drives: by John Wiley & Sons, Inc. Chapter 2 Power Semiconductor Switches: An Overview 2-1 2-1Aslam MohammadAinda não há avaliações
- Lecture 6 Speed Control of DC MotorDocumento64 páginasLecture 6 Speed Control of DC MotorYulianto KentosAinda não há avaliações
- DC Drives: by John Wiley & Sons, Inc. Chapter 2 Power Semiconductor Switches: An Overview 2-1 2-1Documento20 páginasDC Drives: by John Wiley & Sons, Inc. Chapter 2 Power Semiconductor Switches: An Overview 2-1 2-1Engr Umar AshrafAinda não há avaliações
- Chapter 2Documento46 páginasChapter 2Syazwan HafidziAinda não há avaliações
- Unit - 2 SSDDocumento85 páginasUnit - 2 SSDAkshat SaxenaAinda não há avaliações
- XLecture 7 - DC DrivesDocumento29 páginasXLecture 7 - DC DrivesমোঃওমরফারুকAinda não há avaliações
- IDS NewDocumento128 páginasIDS NewShahbaz Ali100% (1)
- Direct-Current Motor CharacteristicsDocumento17 páginasDirect-Current Motor CharacteristicsMarque Adrian EncinaAinda não há avaliações
- DC Motor Speed Control: Bayan University For Science & TechnologyDocumento12 páginasDC Motor Speed Control: Bayan University For Science & TechnologyAltayeb AbdulhameedAinda não há avaliações
- Unit 2 - EDDocumento42 páginasUnit 2 - EDMohit L.E. 008Ainda não há avaliações
- Karnataka Govt Evening Polytechnic MangaluruDocumento9 páginasKarnataka Govt Evening Polytechnic MangaluruKishore KAinda não há avaliações
- Chapter - 1 DET5063 Combine pdf-1Documento30 páginasChapter - 1 DET5063 Combine pdf-1Muhd FaizAinda não há avaliações
- DC Motors and Generators Chapter # 9Documento13 páginasDC Motors and Generators Chapter # 9SamiAinda não há avaliações
- Ac DC DriveDocumento92 páginasAc DC DriveUmang JainAinda não há avaliações
- Electric DrivesDocumento5 páginasElectric DrivesSiddhant GaikwadAinda não há avaliações
- Power ElectronicsDocumento4 páginasPower Electronicsanwita.basakAinda não há avaliações
- Energy Conversion One: Chapter NineDocumento15 páginasEnergy Conversion One: Chapter NineSneh Deep SKAinda não há avaliações
- Module IIIDocumento32 páginasModule IIIsubhasish nayakAinda não há avaliações
- Unit Ii Drive ChaacteristicsDocumento26 páginasUnit Ii Drive Chaacteristicssaravanakmar vAinda não há avaliações
- IDC Unit-4Documento9 páginasIDC Unit-4Gaurav SinghAinda não há avaliações
- Separately Excited DC Motor ExplainedDocumento3 páginasSeparately Excited DC Motor ExplainedMaitri ShahAinda não há avaliações
- Electrical Ac & DC Drives: S.Sumalatha G.Lakshmi PrasannaDocumento20 páginasElectrical Ac & DC Drives: S.Sumalatha G.Lakshmi PrasannageniunetAinda não há avaliações
- DC DrivesDocumento10 páginasDC DrivesEuoshy HussainAinda não há avaliações
- Drives Acdc - CNCDocumento42 páginasDrives Acdc - CNCShami KunalAinda não há avaliações
- (VT Ranganathan) Course Notes On Electric DrivesDocumento119 páginas(VT Ranganathan) Course Notes On Electric DrivesPowerranger2.0Ainda não há avaliações
- Unit 2 BedcDocumento61 páginasUnit 2 BedcASHISHAinda não há avaliações
- 1.DC Motor Drives-Part1 Module 2 PDFDocumento77 páginas1.DC Motor Drives-Part1 Module 2 PDFsuvij ksAinda não há avaliações
- Resume B Ing Sistem Kendali Mesin Listrik 1Documento7 páginasResume B Ing Sistem Kendali Mesin Listrik 1Vandy DpAinda não há avaliações
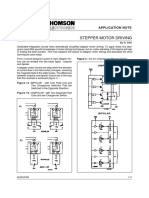
- Stepper Motor Driving: Application NoteDocumento17 páginasStepper Motor Driving: Application NoteGonzalo RiosAinda não há avaliações
- Stepper Motor Driving: Application NoteDocumento17 páginasStepper Motor Driving: Application NoteGonzalo RiosAinda não há avaliações
- Modes of Operation of Stepper MotorDocumento17 páginasModes of Operation of Stepper MotorSoumik GhoshAinda não há avaliações
- DC Motor S: Anand 08338958770Documento79 páginasDC Motor S: Anand 08338958770Rohit AvasthiAinda não há avaliações
- Guerra, John Nichol N. Bsme 3C (Ac and DC Ass.2)Documento22 páginasGuerra, John Nichol N. Bsme 3C (Ac and DC Ass.2)John Nichol GuerraAinda não há avaliações
- Modern VVVF DrivesDocumento5 páginasModern VVVF DrivesJohn BackmanAinda não há avaliações
- ELECTRICAL MACHINE 1: Self-Excited DC Generator Parts and OperationDocumento56 páginasELECTRICAL MACHINE 1: Self-Excited DC Generator Parts and Operationjason mr.perfect11Ainda não há avaliações
- DC Motors Starters and Breaking MethodsDocumento25 páginasDC Motors Starters and Breaking MethodsRukkuArunAinda não há avaliações
- Converters For Electric VehicleDocumento8 páginasConverters For Electric VehicleAirton FloresAinda não há avaliações
- Bule Hora University Department of Ece Eceg 4222 Power Electronics & Electric DrivesDocumento14 páginasBule Hora University Department of Ece Eceg 4222 Power Electronics & Electric DrivesBilisuma DamiteAinda não há avaliações
- Class DutyDocumento58 páginasClass DutyHarsha AnantwarAinda não há avaliações
- Module 3 - Shunt DC MotorDocumento12 páginasModule 3 - Shunt DC MotorMARY JOY MAGAWAYAinda não há avaliações
- DC Motor Speed Control MethodsDocumento53 páginasDC Motor Speed Control MethodsKuhaanProAinda não há avaliações
- Chapter 2 Det50063 - Speed Control of DC MotorDocumento54 páginasChapter 2 Det50063 - Speed Control of DC MotorFara Fara100% (1)
- EE-260 Lecture 36 Chapter 09Documento17 páginasEE-260 Lecture 36 Chapter 09Hamza BashirAinda não há avaliações
- DC Motors Starting MethodsDocumento6 páginasDC Motors Starting MethodsSai Teja KondraAinda não há avaliações
- EM ch-9 DC MOTORS AND GENERATORSDocumento65 páginasEM ch-9 DC MOTORS AND GENERATORSmuhammad.anas2007Ainda não há avaliações
- DC Motors Starters and Breaking MethodsDocumento25 páginasDC Motors Starters and Breaking Methodskrishnareddy_chintalaAinda não há avaliações
- TOPIK1 - 27.9.2021 Versi 2 BARUDocumento45 páginasTOPIK1 - 27.9.2021 Versi 2 BARUtiagoAinda não há avaliações
- 637 - 2024 Lab-4 Induction MachinesDocumento12 páginas637 - 2024 Lab-4 Induction Machineseren.alliAinda não há avaliações
- DC Motor Characteristics - Your Electrical GuideDocumento17 páginasDC Motor Characteristics - Your Electrical GuideMohamedibrahim SAinda não há avaliações
- Lecture 6Documento31 páginasLecture 6amanuel abrehaAinda não há avaliações
- Power Electronics: Lecture Notes of Power Electronics CourseNo EverandPower Electronics: Lecture Notes of Power Electronics CourseAinda não há avaliações
- Brochure HiLight RangeDocumento16 páginasBrochure HiLight RangeMostafa AmrAinda não há avaliações
- Green6 Spe User ManualDocumento16 páginasGreen6 Spe User ManualnightfurryifyAinda não há avaliações
- GSA Report HarjamekarDocumento4 páginasGSA Report HarjamekarnightfurryifyAinda não há avaliações
- Dewateringtechniques 131123062115 Phpapp01Documento27 páginasDewateringtechniques 131123062115 Phpapp01NaferMrtnzMAinda não há avaliações
- Dewatering Pumps For MiningDocumento10 páginasDewatering Pumps For Miningsieged_rj3165Ainda não há avaliações
- Lead acid vs lithium-ion battery comparison: which is betterDocumento5 páginasLead acid vs lithium-ion battery comparison: which is betterRasbihari SharmaAinda não há avaliações
- 32 Sample ChapterDocumento6 páginas32 Sample ChapterMsc MaiaAinda não há avaliações
- Sugar Crane Harvester BrosureDocumento20 páginasSugar Crane Harvester BrosurenightfurryifyAinda não há avaliações
- Minedewateringtechniques 131123062554 Phpapp02Documento25 páginasMinedewateringtechniques 131123062554 Phpapp02nightfurryifyAinda não há avaliações
- Minedewateringtechniques 131123062554 Phpapp02Documento25 páginasMinedewateringtechniques 131123062554 Phpapp02nightfurryifyAinda não há avaliações
- Factsheet Electric Powered Heavy Good Vehicles enDocumento2 páginasFactsheet Electric Powered Heavy Good Vehicles ennightfurryifyAinda não há avaliações
- 980e 4 PDFDocumento16 páginas980e 4 PDFnikbeam0% (1)
- Exjobb2003 Magnetisering Av GeneratorerDocumento38 páginasExjobb2003 Magnetisering Av GeneratorerhhxmanAinda não há avaliações
- 086 - 2004 Nov O Level Physics (5052) P1 P2 - Suggested Answers (PDF Library)Documento4 páginas086 - 2004 Nov O Level Physics (5052) P1 P2 - Suggested Answers (PDF Library)McDonald Whites JonesAinda não há avaliações
- (Advanced Structured Materials 135) Farzad Hejazi, Tan Kar Chun - Conceptual Theories in Structural Dynamics-Springer Singapore - Springer (2020)Documento227 páginas(Advanced Structured Materials 135) Farzad Hejazi, Tan Kar Chun - Conceptual Theories in Structural Dynamics-Springer Singapore - Springer (2020)Mohammed AbduAinda não há avaliações
- Measuring Viscosity at High Shear Rate by Tapered Bearing Simulator Viscometer at 100 °CDocumento13 páginasMeasuring Viscosity at High Shear Rate by Tapered Bearing Simulator Viscometer at 100 °Cmohammed karasnehAinda não há avaliações
- Moment of Inertia 2Documento51 páginasMoment of Inertia 2Kunal kumarAinda não há avaliações
- REWINDABLE SUBMERSIBLE MOTORSDocumento4 páginasREWINDABLE SUBMERSIBLE MOTORSHamdi NaufelAinda não há avaliações
- Line Sizing ProcedureDocumento123 páginasLine Sizing ProcedureEkundayo John100% (3)
- Manual Basler Avr Decs200 NDocumento192 páginasManual Basler Avr Decs200 NSandro Muniz SouzaAinda não há avaliações
- Double Cage Rotor Motor StructureDocumento2 páginasDouble Cage Rotor Motor Structuresalma100% (1)
- Motor AnalysisDocumento16 páginasMotor AnalysisRehan MurtazaAinda não há avaliações
- Stator Core TestingDocumento1 páginaStator Core Testingedortiz1Ainda não há avaliações
- EDC Mini ProjectDocumento7 páginasEDC Mini ProjectVICKY PAWARAinda não há avaliações
- 5.20. Psychrometrics - Example 5. Summer Cycle (Air Flows To Be Calculated)Documento10 páginas5.20. Psychrometrics - Example 5. Summer Cycle (Air Flows To Be Calculated)tehtehtehAinda não há avaliações
- HTF Buildigng Cable Hippot Test From VFD To MotorDocumento20 páginasHTF Buildigng Cable Hippot Test From VFD To Motorمحمد ابن علیAinda não há avaliações
- Name: Maturan, Renz Myko B. Date: November 28, 2022 Subject & Section: EE 330 AC/DC Machineries - CDocumento7 páginasName: Maturan, Renz Myko B. Date: November 28, 2022 Subject & Section: EE 330 AC/DC Machineries - CRenz MykoAinda não há avaliações
- AFM Lab. ManualDocumento91 páginasAFM Lab. Manual70109620Ainda não há avaliações
- Tapping Volcanic Energy for Human UseDocumento8 páginasTapping Volcanic Energy for Human UseKadita Mage100% (1)
- Ambipolar Transport Equation Describes Excess CarriersDocumento30 páginasAmbipolar Transport Equation Describes Excess CarriersVikas PsAinda não há avaliações
- Assignment I - Spring 2021 - PHY101 - 03Documento2 páginasAssignment I - Spring 2021 - PHY101 - 03Nasif KamalAinda não há avaliações
- JEE Main-5 - JEE 2024 - SolutionDocumento13 páginasJEE Main-5 - JEE 2024 - SolutionDivyeh ChaturvediAinda não há avaliações
- Thermal Chemistry Calorimeter Problem AnswersDocumento3 páginasThermal Chemistry Calorimeter Problem AnswersrkvermAinda não há avaliações
- Certificados Internacionais HPK 1 500Documento11 páginasCertificados Internacionais HPK 1 500JeanMacedoAinda não há avaliações
- smk0465 Nchannel MosfetDocumento8 páginassmk0465 Nchannel MosfetharshAinda não há avaliações
- SIPROTEC 4 7UM62 multifunction generator protection relayDocumento39 páginasSIPROTEC 4 7UM62 multifunction generator protection relayJay Rameshbhai ParikhAinda não há avaliações
- Classnotesforyou, 1Documento26 páginasClassnotesforyou, 1Robin RappaiAinda não há avaliações
- 3 Winding Transformer Impedance Calculation in IEC Short Circuit StudyDocumento4 páginas3 Winding Transformer Impedance Calculation in IEC Short Circuit StudydrboudAinda não há avaliações
- OCR Maths M2 Topic Questions From Papers Energy, Work and Power AnswersDocumento9 páginasOCR Maths M2 Topic Questions From Papers Energy, Work and Power Answersjunk filesAinda não há avaliações
- Lecture - 10 Buoyancy and Stability PDFDocumento5 páginasLecture - 10 Buoyancy and Stability PDFKpChuaAinda não há avaliações
- Abstract-This Experiment Is To Examine The Time DomainDocumento1 páginaAbstract-This Experiment Is To Examine The Time DomainSajjad AhmedAinda não há avaliações
- Wave and Oscillation QuestionsDocumento24 páginasWave and Oscillation QuestionsAlok ChaturvediAinda não há avaliações