Você também pode gostar
- Instrumentation Overview: Pelatihan Instrumentation and Control FundamentalDocumento58 páginasInstrumentation Overview: Pelatihan Instrumentation and Control FundamentalfaridaAinda não há avaliações
- Sensors and TransducersDocumento35 páginasSensors and TransducersAniket100% (1)
- Mechanical Measurements and Metrology: Unit 1: Introduction To MeasurementsDocumento24 páginasMechanical Measurements and Metrology: Unit 1: Introduction To MeasurementsYASH RAYUDU 16131A03N4Ainda não há avaliações
- EMI (1)Documento8 páginasEMI (1)kichu2522Ainda não há avaliações
- Electronic Measurement and Instrumentation GuideDocumento24 páginasElectronic Measurement and Instrumentation GuideShivam Kumar YadavAinda não há avaliações
- Advanced Instrumentation: - Course ContentsDocumento22 páginasAdvanced Instrumentation: - Course Contentsee05d008Ainda não há avaliações
- Vibscanner Training Part 1Documento95 páginasVibscanner Training Part 1yerin100% (1)
- Chapter 1Documento40 páginasChapter 1Dagem GetachewAinda não há avaliações
- Intro 32Documento252 páginasIntro 32ANTOAinda não há avaliações
- Intrumentation - Introduction To Measurement SystemDocumento31 páginasIntrumentation - Introduction To Measurement Systemoladokunsulaiman100% (3)
- C8: Sensor and Sensor TechnologyDocumento72 páginasC8: Sensor and Sensor TechnologyOladokun Sulaiman Olanrewaju100% (4)
- MeasurementDocumento22 páginasMeasurementDany TrendsAinda não há avaliações
- Measurement SystemsDocumento103 páginasMeasurement SystemsRikki Macolor50% (2)
- Measurement IntroductionDocumento33 páginasMeasurement IntroductionManjula Udayanga HemapalaAinda não há avaliações
- IE 3371:automatic Control Systems: Chapter 2:sensors and TransducersDocumento54 páginasIE 3371:automatic Control Systems: Chapter 2:sensors and Transducersفيصل aAinda não há avaliações
- UNIT 1 - Introduction To Measurement SystemDocumento55 páginasUNIT 1 - Introduction To Measurement SystemPoornima AAinda não há avaliações
- Lecture # 2&3Documento51 páginasLecture # 2&3Noor UL AaienAinda não há avaliações
- Lecture #1 (Measurement Systems)Documento56 páginasLecture #1 (Measurement Systems)inabalqisAinda não há avaliações
- UNIT - 2 Sensors & TransducersDocumento84 páginasUNIT - 2 Sensors & TransducersishaanmittalcollegeAinda não há avaliações
- Industrial InstrumentationDocumento74 páginasIndustrial InstrumentationAjish AJAinda não há avaliações
- Performance Characteristics of Sensors and ActuatorsDocumento23 páginasPerformance Characteristics of Sensors and ActuatorslinkayessAinda não há avaliações
- Unit 1 - Basic Instrumentation And Measurement Techniques PPT Notes Material For Sem II Uploaded By Navdeep RaghavDocumento144 páginasUnit 1 - Basic Instrumentation And Measurement Techniques PPT Notes Material For Sem II Uploaded By Navdeep Raghavavikool1708Ainda não há avaliações
- Week 5 Lecture on Transducers and Temperature MeasurementDocumento10 páginasWeek 5 Lecture on Transducers and Temperature MeasurementnatzenAinda não há avaliações
- Class 17 - Dabhol Case StudyDocumento24 páginasClass 17 - Dabhol Case StudyBaljeetSinghKhoslaAinda não há avaliações
- Presentation 1Documento29 páginasPresentation 1enok henaAinda não há avaliações
- Instrumentation For StudentsDocumento157 páginasInstrumentation For StudentsBalasubramanyaAinda não há avaliações
- Analog InstrumentsDocumento148 páginasAnalog InstrumentsPramod PathadeAinda não há avaliações
- Ele2213 Set 1Documento40 páginasEle2213 Set 1MUSOKE SIMON DEOAinda não há avaliações
- Measurements & TransducersDocumento63 páginasMeasurements & TransducersManvendra Pratap Singh BishtAinda não há avaliações
- Chapter 2. Sensors and ActuatorsDocumento58 páginasChapter 2. Sensors and ActuatorsTesfaye Olana100% (1)
- Chapter 2Documento65 páginasChapter 2Rakesh KumarAinda não há avaliações
- Sensors and Data Acquisition: Radar GunDocumento91 páginasSensors and Data Acquisition: Radar GunBurak Bildirici100% (1)
- Transducers and Sensors ReviewDocumento113 páginasTransducers and Sensors ReviewSyedZameerAinda não há avaliações
- Measuring Instrument FundamentalsDocumento56 páginasMeasuring Instrument Fundamentalskalaivani1408Ainda não há avaliações
- Review of Sensor / Transducers Review of Sensor / TransducersDocumento21 páginasReview of Sensor / Transducers Review of Sensor / TransducersdhineshpAinda não há avaliações
- Measurements and InstrumentationDocumento62 páginasMeasurements and Instrumentationteam7.fypAinda não há avaliações
- Module 1 Part 1 MergedDocumento146 páginasModule 1 Part 1 MergedSankaranarayanan AAinda não há avaliações
- Generalized Measurement Systems and Their Functional ElementsDocumento16 páginasGeneralized Measurement Systems and Their Functional ElementsTajammul HussainAinda não há avaliações
- Measuring Systems IntroductionDocumento34 páginasMeasuring Systems IntroductionEI020 JAYARAM SAinda não há avaliações
- Measuring Instrument FundamentalsDocumento24 páginasMeasuring Instrument FundamentalsAnitha AnuAinda não há avaliações
- Metrology and MeasurementsDocumento45 páginasMetrology and MeasurementsgurunathramAinda não há avaliações
- Ics U1 QBDocumento31 páginasIcs U1 QB19951A0337 KOTHAPALLI PRANAY TEJAAinda não há avaliações
- PI2 MeasurementDocumento37 páginasPI2 MeasurementRamkumar AAinda não há avaliações
- Exam Set 3Documento9 páginasExam Set 3Assignment HelperAinda não há avaliações
- Sensor: - The Device Which Change Energy From One Form To AnotherDocumento0 páginaSensor: - The Device Which Change Energy From One Form To Anotherwww.bhawesh.com.npAinda não há avaliações
- Lec - 2 InstrumentDocumento31 páginasLec - 2 Instrumentefrem atsbahaAinda não há avaliações
- Industrial Automation Part 3Documento50 páginasIndustrial Automation Part 3Eamin ChAinda não há avaliações
- EE121 MEASUREMENTS AND INSTRUMENTATION SYLLABUSDocumento62 páginasEE121 MEASUREMENTS AND INSTRUMENTATION SYLLABUSJoseph Samir FaikAinda não há avaliações
- Sensors and TransducersDocumento79 páginasSensors and TransducersMohdQasim0% (1)
- Measurements and Instrument CharacteristicsDocumento26 páginasMeasurements and Instrument CharacteristicsWalid KhaledAinda não há avaliações
- Instrument Ass. 2Documento14 páginasInstrument Ass. 2Chaudhry Salman Gujjar89% (35)
- Instruments Guide: Types, Performance & CharacteristicsDocumento30 páginasInstruments Guide: Types, Performance & CharacteristicsHamode AlonAinda não há avaliações
- EE465-Lecture 2Documento34 páginasEE465-Lecture 2Technical saadAinda não há avaliações
- Robotics Unit-5Documento64 páginasRobotics Unit-5S19IT1215 HarshithaAinda não há avaliações
- Transducers and Sensors Definitions PerformanceDocumento31 páginasTransducers and Sensors Definitions PerformanceKibrom MenasboAinda não há avaliações
- Ultrasound Analysis for Condition Monitoring: Applications of Ultrasound Detection for Various Industrial EquipmentNo EverandUltrasound Analysis for Condition Monitoring: Applications of Ultrasound Detection for Various Industrial EquipmentNota: 4.5 de 5 estrelas4.5/5 (3)
- Power Electronics Applied to Industrial Systems and Transports: Volume 5: Measurement Circuits, Safeguards and Energy StorageNo EverandPower Electronics Applied to Industrial Systems and Transports: Volume 5: Measurement Circuits, Safeguards and Energy StorageAinda não há avaliações
- Handbook of Mechanical and Materials EngineeringNo EverandHandbook of Mechanical and Materials EngineeringNota: 5 de 5 estrelas5/5 (4)
- Comprehensive Overcurrent Protection for Motors and FeedersDocumento12 páginasComprehensive Overcurrent Protection for Motors and FeedersbrunotomeAinda não há avaliações
- N2Xrgby (Cu / Xlpe / Swa / Sta / PVC)Documento1 páginaN2Xrgby (Cu / Xlpe / Swa / Sta / PVC)Prasetiyo HanantoAinda não há avaliações
- Preliminary Electrical Analysis Day 1Documento57 páginasPreliminary Electrical Analysis Day 1royclhorAinda não há avaliações
- Excel Competency Exam Practice TestDocumento6 páginasExcel Competency Exam Practice TestPrasetiyo HanantoAinda não há avaliações
- Introduction to Symmetrical Components and Fault AnalysisDocumento66 páginasIntroduction to Symmetrical Components and Fault AnalysisbajricaAinda não há avaliações
- Drawing - CB L2Documento4 páginasDrawing - CB L2Prasetiyo HanantoAinda não há avaliações
- Single Line PSR Senen #1Documento1 páginaSingle Line PSR Senen #1Prasetiyo HanantoAinda não há avaliações
- Opsagenda 011409 XiiDocumento17 páginasOpsagenda 011409 XiiPrasetiyo HanantoAinda não há avaliações
- SLD GoodyearDocumento1 páginaSLD GoodyearPrasetiyo HanantoAinda não há avaliações
- DCS Hardwired Signal Interface (Requirement) - Rev1Documento1 páginaDCS Hardwired Signal Interface (Requirement) - Rev1Prasetiyo HanantoAinda não há avaliações
- 1 PB PDFDocumento3 páginas1 PB PDFPrasetiyo HanantoAinda não há avaliações
- N2XSEBY 3 CORE 3.6-6 kV CTSDocumento66 páginasN2XSEBY 3 CORE 3.6-6 kV CTSPrasetiyo HanantoAinda não há avaliações
- Relay Box PDFDocumento1 páginaRelay Box PDFPrasetiyo HanantoAinda não há avaliações
- Relay BoxDocumento1 páginaRelay BoxPrasetiyo HanantoAinda não há avaliações
- Name Januari Februari Maret Pras 50000 50000 50000 Tanto 50000 50000 50000 ROY 50000 50000 50000Documento1 páginaName Januari Februari Maret Pras 50000 50000 50000 Tanto 50000 50000 50000 ROY 50000 50000 50000Prasetiyo HanantoAinda não há avaliações
- TONASA V - Project Documentation1Documento16 páginasTONASA V - Project Documentation1Prasetiyo HanantoAinda não há avaliações
- IEC 60076-2 Ed. 3.0 PDFDocumento12 páginasIEC 60076-2 Ed. 3.0 PDFPrasetiyo Hananto0% (3)
- Control Building Layout - 150kVDocumento1 páginaControl Building Layout - 150kVPrasetiyo HanantoAinda não há avaliações
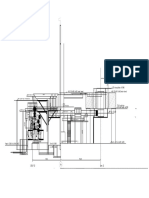
- IPB Layout - Side ViewDocumento1 páginaIPB Layout - Side ViewPrasetiyo HanantoAinda não há avaliações
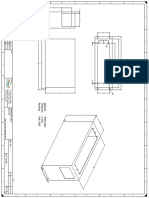
- Cable Block Diagram Box VTDocumento1 páginaCable Block Diagram Box VTPrasetiyo HanantoAinda não há avaliações
- Add-Bab Xii.3. TPG Gi JenepontoDocumento17 páginasAdd-Bab Xii.3. TPG Gi JenepontoPrasetiyo HanantoAinda não há avaliações
- 60364-3 Electrical Installations of BuildingsDocumento90 páginas60364-3 Electrical Installations of Buildingsrdas198050% (2)
- Medium Voltage Cable-File PDFDocumento66 páginasMedium Voltage Cable-File PDFPrasetiyo HanantoAinda não há avaliações
- SIMEASDocumento28 páginasSIMEASPrasetiyo HanantoAinda não há avaliações
- Hero3 Plus Black Um Eng RevdDocumento71 páginasHero3 Plus Black Um Eng Revderrand37Ainda não há avaliações
- 0-ME719-VE610-00011 Isolation Phase Bus Duct Operations and Maintenance Manual RADocumento21 páginas0-ME719-VE610-00011 Isolation Phase Bus Duct Operations and Maintenance Manual RAPrasetiyo HanantoAinda não há avaliações
- As 1391-2007 (+a1)Documento8 páginasAs 1391-2007 (+a1)Tuan DangAinda não há avaliações
- Saep 1624Documento25 páginasSaep 1624Anonymous 4IpmN7OnAinda não há avaliações
- Applications of The Venturi TubeDocumento8 páginasApplications of The Venturi Tubeandro hasugian91Ainda não há avaliações
- Iec 60034-2Documento76 páginasIec 60034-2Christos Apostolopoulos100% (1)
- ASTM B504-Coulometric Method For Coating ThicknessDocumento4 páginasASTM B504-Coulometric Method For Coating ThicknessReshan VidurangaAinda não há avaliações
- En Operation Instructions PaxScan 4336R RevA 2017-06Documento46 páginasEn Operation Instructions PaxScan 4336R RevA 2017-06Luis Fernando Garcia S50% (2)
- Manual de Operación Terrometro de GanchoDocumento19 páginasManual de Operación Terrometro de GanchoIsrael SanchezAinda não há avaliações
- Micropipeta HTL Optipette MEDocumento27 páginasMicropipeta HTL Optipette MEDiana NogueiraAinda não há avaliações
- A Baseline Assessment of Light Pollution Impact On Anglesey, North Wales, UKDocumento42 páginasA Baseline Assessment of Light Pollution Impact On Anglesey, North Wales, UKZiyou NushenAinda não há avaliações
- Distillation of Crude Petroleum (15-Theoretical Plate Column)Documento32 páginasDistillation of Crude Petroleum (15-Theoretical Plate Column)JesseAinda não há avaliações
- 353B34Documento16 páginas353B34Adrian TudoracheAinda não há avaliações
- Intecont Tersus Weighfeeder: Instruction ManualDocumento177 páginasIntecont Tersus Weighfeeder: Instruction ManualAltigran RibeiroAinda não há avaliações
- DPR Procedure Guide for Determining Petroleum Quantity and QualityDocumento114 páginasDPR Procedure Guide for Determining Petroleum Quantity and QualityAneeshAinda não há avaliações
- Tba 2000FRDocumento11 páginasTba 2000FRhitendra11100% (1)
- Catalog Electronic Test Measurement EquipmentDocumento96 páginasCatalog Electronic Test Measurement Equipmentyo6blm12Ainda não há avaliações
- Hospital Commissioning Checklists: Structural & Operational StandardsDocumento50 páginasHospital Commissioning Checklists: Structural & Operational Standardsmohamed radwan100% (1)
- POSITIVE MATERIAL IDENTIFICATION PROCEDUREDocumento19 páginasPOSITIVE MATERIAL IDENTIFICATION PROCEDURERifanjshshAinda não há avaliações
- Keithley 775ADocumento132 páginasKeithley 775AboboklaphotoAinda não há avaliações
- Manual de Densitometro InglesDocumento91 páginasManual de Densitometro Inglesprincipito12Ainda não há avaliações
- Issues in the Blood Gas LaboratoryDocumento46 páginasIssues in the Blood Gas LaboratoryBereket LemmaAinda não há avaliações
- Sensepoint XCD: Calibration GuideDocumento6 páginasSensepoint XCD: Calibration GuideOMAR YESID MARTINEZ PENAAinda não há avaliações
- Guia Rapida Au480Documento34 páginasGuia Rapida Au480CARLOS100% (1)
- P-520 pH/Conductivity Meter User ManualDocumento20 páginasP-520 pH/Conductivity Meter User ManualFuja KusumaAinda não há avaliações
- Fluke QED 6 PDFDocumento72 páginasFluke QED 6 PDFYesid Dayan De Leon EscorciaAinda não há avaliações
- ISOASTM51204Documento10 páginasISOASTM51204Partth VachhaniAinda não há avaliações
- 417M Manual Rev7 2 LemiDocumento38 páginas417M Manual Rev7 2 LemiJohn Franc100% (1)
- Spec - Shop Inspection RequirementDocumento28 páginasSpec - Shop Inspection RequirementarissaAinda não há avaliações
- Specifications For CrossingsDocumento58 páginasSpecifications For Crossingsapi-3698996100% (1)
- CR-IR363-PROFECT CS Plus PDFDocumento1.404 páginasCR-IR363-PROFECT CS Plus PDFBenjamin Gonzalez100% (1)
- NAVAIR 17-20AA-138 Rev 1 March 2007 AMPLIFIERSDocumento13 páginasNAVAIR 17-20AA-138 Rev 1 March 2007 AMPLIFIERSenticoAinda não há avaliações