Você também pode gostar
- Rtos Para Medição De Amperímetro Programado No ArduinoNo EverandRtos Para Medição De Amperímetro Programado No ArduinoAinda não há avaliações
- Resumo Sobre SensoresDocumento13 páginasResumo Sobre SensoresCélio JuniorAinda não há avaliações
- Transpa Robot Mitsubishi RV2AJDocumento40 páginasTranspa Robot Mitsubishi RV2AJJair ZorziAinda não há avaliações
- Acionamento Remoto De Televisor Com Gsm Usando Comandos Sms Com Módulo Sim800l Programado No ArduinoNo EverandAcionamento Remoto De Televisor Com Gsm Usando Comandos Sms Com Módulo Sim800l Programado No ArduinoAinda não há avaliações
- Robótica - Matrizes de Transformações XyzDocumento12 páginasRobótica - Matrizes de Transformações XyzDouglas GoiosAinda não há avaliações
- Respostas Capítulo 1Documento15 páginasRespostas Capítulo 1Eduardo AlmeidaAinda não há avaliações
- Transformadores e Autotransformadores de Baixa TensãoDocumento2 páginasTransformadores e Autotransformadores de Baixa TensãoMarcelo LacerdaAinda não há avaliações
- Desenvolvendo Uma Interface Ihm Modbus Tcp/ip No ArduinoNo EverandDesenvolvendo Uma Interface Ihm Modbus Tcp/ip No ArduinoAinda não há avaliações
- Apostila Roteiros Lab Automação IndustrialDocumento80 páginasApostila Roteiros Lab Automação IndustrialJhonatan TavaresAinda não há avaliações
- CLP Zelio TelemecaniqueDocumento8 páginasCLP Zelio Telemecaniquetom_1751Ainda não há avaliações
- Guia Usuario Alarme Intelbras AMT2018EDocumento2 páginasGuia Usuario Alarme Intelbras AMT2018EPauloJaponeisAinda não há avaliações
- Programação Em C E Assembly Para A Família Mc68hc908No EverandProgramação Em C E Assembly Para A Família Mc68hc908Ainda não há avaliações
- Apostila Motor de Passo CtismDocumento13 páginasApostila Motor de Passo Ctismtiago.luz3922Ainda não há avaliações
- Projetos De Instrumentação Eletrônica Usando O ArduinoNo EverandProjetos De Instrumentação Eletrônica Usando O ArduinoAinda não há avaliações
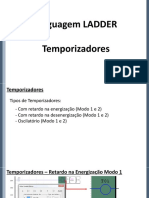
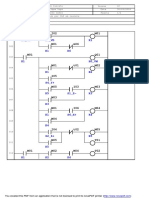
- Linguagem LADDER: TemporizadoresDocumento26 páginasLinguagem LADDER: TemporizadoresBruno CrivelliAinda não há avaliações
- Atalhos PDFDocumento59 páginasAtalhos PDFali achiraAinda não há avaliações
- Apostila Automacao CLP LogoDocumento132 páginasApostila Automacao CLP LogoJosé Roberto StanganiniAinda não há avaliações
- Aplicando Iot Para Medir Célula De Carga Com Esp8266 (nodemcu) Programado Em ArduinoNo EverandAplicando Iot Para Medir Célula De Carga Com Esp8266 (nodemcu) Programado Em ArduinoAinda não há avaliações
- Padrão de Estruturas de Baixa e Média TensãoDocumento114 páginasPadrão de Estruturas de Baixa e Média TensãoBelladayse ModaintimaAinda não há avaliações
- Parafusos de acionamentoDocumento29 páginasParafusos de acionamentoGuilherme Mamede AlcantaraAinda não há avaliações
- Aplicações de Linguagem Ladder PDFDocumento8 páginasAplicações de Linguagem Ladder PDFGuilhermeMirandaAinda não há avaliações
- T47504CDocumento50 páginasT47504CValdemir da silvaAinda não há avaliações
- Apostila - CLP - Lista de InstruçõesDocumento17 páginasApostila - CLP - Lista de InstruçõesAndré Luiz Silva PereiraAinda não há avaliações
- Modulo 2Documento46 páginasModulo 2Thiago PãozimAinda não há avaliações
- STEP7 MicroWINDocumento32 páginasSTEP7 MicroWINJosé BarbosaAinda não há avaliações
- Dimensione a tensão de saída com LM317Documento1 páginaDimensione a tensão de saída com LM317António Henriques100% (1)
- Programação básica de CLP com memórias internas e simulação de 3 motoresDocumento63 páginasProgramação básica de CLP com memórias internas e simulação de 3 motoresWesley DavidAinda não há avaliações
- Controle PID com Ethernet e acesso remotoDocumento54 páginasControle PID com Ethernet e acesso remotosapolino123Ainda não há avaliações
- Mesa Cartesiana CLP CascataDocumento2 páginasMesa Cartesiana CLP CascataLOURISVAN COSTA100% (1)
- Automação de corte de tubosDocumento11 páginasAutomação de corte de tubosJoão PauloAinda não há avaliações
- Circuitos Lógicos Sequenciais e MemóriasDocumento69 páginasCircuitos Lógicos Sequenciais e MemóriasabednegoAinda não há avaliações
- Notebook não liga: testes básicosDocumento8 páginasNotebook não liga: testes básicosCleumo BarrosAinda não há avaliações
- Tutorial LogixProDocumento21 páginasTutorial LogixProantonsuwantoAinda não há avaliações
- Manual LogixproDocumento20 páginasManual LogixproDaniel de la CruzAinda não há avaliações
- Transmissão em Banda BaseDocumento49 páginasTransmissão em Banda BaseDaniel Sá Araújo100% (1)
- Sensor IndutivoDocumento4 páginasSensor IndutivojessicaAinda não há avaliações
- Automação Predial TronDocumento33 páginasAutomação Predial TronMarcos SantosAinda não há avaliações
- Listaexercicios CLPDocumento13 páginasListaexercicios CLPBruno KfouriAinda não há avaliações
- Comunicação entre PLCs Twido via macro EthernetDocumento8 páginasComunicação entre PLCs Twido via macro EthernetlukarrAinda não há avaliações
- CompensadoraDocumento6 páginasCompensadoraSaulo AlvesAinda não há avaliações
- Diálogo Homem-MáquinaDocumento34 páginasDiálogo Homem-MáquinaPedro CostaAinda não há avaliações
- Sistemas Supervisórios 2 PDFDocumento19 páginasSistemas Supervisórios 2 PDFIgor FelipeAinda não há avaliações
- Treinamento Avançado de Programação de CLPDocumento68 páginasTreinamento Avançado de Programação de CLPdatlogAinda não há avaliações
- Manual Antron IIDocumento18 páginasManual Antron IIleonardoAinda não há avaliações
- 1 - Exercicios AICIIIDocumento7 páginas1 - Exercicios AICIIIfortminorAinda não há avaliações
- Roteiro Aula Prática - Sensores em ArduinoDocumento15 páginasRoteiro Aula Prática - Sensores em ArduinoDyogo Mondego MoraesAinda não há avaliações
- IntroducaoDocumento8 páginasIntroducaojotakisAinda não há avaliações
- Robótica IndustrialDocumento10 páginasRobótica IndustrialDanyel MoraesAinda não há avaliações
- Controle de nível e semáforo usando PLCDocumento18 páginasControle de nível e semáforo usando PLCLazim DalbelloAinda não há avaliações
- Timers em MicrocontroladoresDocumento28 páginasTimers em MicrocontroladoresAnderson Rocha50% (2)
- Máquina de estados para controle de tráfegoDocumento22 páginasMáquina de estados para controle de tráfegoanon_656790980Ainda não há avaliações
- CLP para IniciantesDocumento25 páginasCLP para Iniciantesandersonalves_cruzAinda não há avaliações
- Trabalho de Algebra de BooleDocumento12 páginasTrabalho de Algebra de BooleTony MendesAinda não há avaliações
- Peças de engenharia com dimensões e especificaçõesDocumento1 páginaPeças de engenharia com dimensões e especificaçõesCláudia ZanettiAinda não há avaliações
- Retificador monofásico meia onda análiseDocumento26 páginasRetificador monofásico meia onda análiseAlexandreSilvaAinda não há avaliações
- Link 1 Junta 3Documento1 páginaLink 1 Junta 3LuizAinda não há avaliações
- Link 1Documento1 páginaLink 1LuizAinda não há avaliações
- Diagramas de Bode - 20Documento6 páginasDiagramas de Bode - 20Rodrigo FilhoAinda não há avaliações
- Tabelas de Dados Climáticos - BrasilDocumento6 páginasTabelas de Dados Climáticos - BrasilJoaquim PaulinoAinda não há avaliações
- Projeto prático de sistema embarcado da UnicampDocumento12 páginasProjeto prático de sistema embarcado da UnicampLuizAinda não há avaliações
- Link 1Documento1 páginaLink 1LuizAinda não há avaliações
- Projeto prático de sistema embarcado da UnicampDocumento12 páginasProjeto prático de sistema embarcado da UnicampLuizAinda não há avaliações
- Modelo do motor DCDocumento2 páginasModelo do motor DCTiago FariaAinda não há avaliações
- 6th Central Pay Commission Salary CalculatorDocumento15 páginas6th Central Pay Commission Salary Calculatorrakhonde100% (436)
- Metodos de DiscretizacaoDocumento6 páginasMetodos de DiscretizacaoWeslley LiraAinda não há avaliações
- DesertificaçãoDocumento10 páginasDesertificaçãoLuizAinda não há avaliações
- Automacao Autoa20Documento4 páginasAutomacao Autoa20Profissional SENAIAinda não há avaliações
- Maquina de Estado - Comando CASEDocumento2 páginasMaquina de Estado - Comando CASELuizAinda não há avaliações
- SeriesDocumento1 páginaSeriesLuizAinda não há avaliações
- Maquina de Estado - Comando CASEDocumento2 páginasMaquina de Estado - Comando CASELuizAinda não há avaliações
- ES663 Aula11 PDFDocumento46 páginasES663 Aula11 PDFLuizAinda não há avaliações
- Isolantes, Semicondutores e CondutoresDocumento6 páginasIsolantes, Semicondutores e CondutoresLuizAinda não há avaliações
- Método padrão para circuitos elétricos e sistemas mecânicosDocumento4 páginasMétodo padrão para circuitos elétricos e sistemas mecânicosLuizAinda não há avaliações
- 5 CompensadoresDocumento7 páginas5 CompensadoresCaio CézarAinda não há avaliações
- ES663 Aula05 PDFDocumento100 páginasES663 Aula05 PDFLuizAinda não há avaliações
- P1 SolucaoDocumento16 páginasP1 SolucaoLuizAinda não há avaliações
- Motor CC AtualDocumento33 páginasMotor CC AtualLeandro GomesAinda não há avaliações
- Robotica IndustrialDocumento20 páginasRobotica IndustrialLuiz100% (1)
- Circuito Equivalente InduçãoDocumento24 páginasCircuito Equivalente InduçãocristilanoAinda não há avaliações
- Resumo - 2 ProvaDocumento3 páginasResumo - 2 ProvavanessacavalcantiiAinda não há avaliações
- 29 - 1 - Observabilidade e ControlabilidadeDocumento67 páginas29 - 1 - Observabilidade e ControlabilidadeCleonor C Das NevesAinda não há avaliações
- Refrigeração e climatização: processos e aplicaçõesDocumento146 páginasRefrigeração e climatização: processos e aplicaçõesDaniel UlhoaAinda não há avaliações
- Guia Completo de Programação em PythonDocumento24 páginasGuia Completo de Programação em PythonSimon PjAinda não há avaliações
- Remote API - Funcionamento No CoppeliaDocumento8 páginasRemote API - Funcionamento No CoppeliaLeandro SantanaAinda não há avaliações
- ModarisReleaseNotes PLDocumento13 páginasModarisReleaseNotes PLEsteban Huamani RojasAinda não há avaliações
- Programação Básica em CDocumento97 páginasProgramação Básica em CCristiano Cardoso CorreaAinda não há avaliações
- Rastreando dados de APIs sem JavaScriptDocumento100 páginasRastreando dados de APIs sem JavaScriptLucas RezendeAinda não há avaliações
- FP01Documento13 páginasFP01King DeMokaAinda não há avaliações
- Adicionando multi-tasking ao Arduino com FreeRTOSDocumento4 páginasAdicionando multi-tasking ao Arduino com FreeRTOSel cabonAinda não há avaliações
- Quick ReportDocumento4 páginasQuick ReportJoseilton Cavalcante Dos SantosAinda não há avaliações
- Wagner CoimbraDocumento51 páginasWagner CoimbraLuiz Gustavo FernandesAinda não há avaliações
- Apostila Fireworks CS5 Completo - Truques MágicosDocumento80 páginasApostila Fireworks CS5 Completo - Truques MágicosThiago GrusmãoAinda não há avaliações
- Apostila C# Parte 1Documento64 páginasApostila C# Parte 1João Luis Chagas SanchesAinda não há avaliações
- 06 Slides Modulo 6 PDFDocumento133 páginas06 Slides Modulo 6 PDFguidhuAinda não há avaliações
- Manual Pergamum BibliosDocumento255 páginasManual Pergamum BibliosAristides LimaAinda não há avaliações
- Funções de Listas em HaskellDocumento24 páginasFunções de Listas em HaskellNetiu AntnetAinda não há avaliações
- Programacao Funcional Usando Java PDFDocumento146 páginasProgramacao Funcional Usando Java PDFtestelog12Ainda não há avaliações
- O que é biblioteca, API e a diferença entre elasDocumento1 páginaO que é biblioteca, API e a diferença entre elasMarcos Vinícius Sampaio LyrioAinda não há avaliações
- Introdução ao Django FrameworkDocumento49 páginasIntrodução ao Django FrameworkFabiana Acioli de SouzaAinda não há avaliações
- JavaDocumento101 páginasJavaCristiano Borges MilhomemAinda não há avaliações
- JCL Utilities GuideDocumento16 páginasJCL Utilities GuideelaineAinda não há avaliações
- PythonDocumento66 páginasPythonCristiano SilvaAinda não há avaliações
- Introdução À Programação de Autómatos Industriais em Linguagem FBDDocumento18 páginasIntrodução À Programação de Autómatos Industriais em Linguagem FBDAntónio Henriques100% (3)
- Manual de Programacao Orientada Ao ObjectoDocumento86 páginasManual de Programacao Orientada Ao ObjectoChico Mutove CMAinda não há avaliações
- Apol I e II Programação VisualDocumento14 páginasApol I e II Programação VisualfrancieleAinda não há avaliações
- Apostila Natural BasicoDocumento118 páginasApostila Natural BasicojocerlanoAinda não há avaliações
- Xamarin Forms eBook TraduçãoDocumento304 páginasXamarin Forms eBook Traduçãoruben100% (1)
- Consultor em Geotecnologias apresenta softwares SIGDocumento56 páginasConsultor em Geotecnologias apresenta softwares SIGrobertomenezessAinda não há avaliações
- React NativeDocumento2 páginasReact NativeleonardoAinda não há avaliações
- Manual do Proprietário SRU5030/55Documento22 páginasManual do Proprietário SRU5030/55Sebastián RotaAinda não há avaliações
- Introdução A Programação para Dispositivos Móveis Com AndroidDocumento25 páginasIntrodução A Programação para Dispositivos Móveis Com AndroidBruno Andrade100% (1)
- JPA, EJB e MVC: Construindo um sistema cadastralDocumento92 páginasJPA, EJB e MVC: Construindo um sistema cadastralAlexandre RochaAinda não há avaliações