Você também pode gostar
- Temas Selectos Fisica2Documento138 páginasTemas Selectos Fisica2fisicacobaev02100% (3)
- Excel Funciones Anidadas y BuscarVDocumento22 páginasExcel Funciones Anidadas y BuscarVyorrejuelaAinda não há avaliações
- PreguntasDocumento8 páginasPreguntasLuis Jose GarciaAinda não há avaliações
- Importancia de Los Cajeros Automáticos en El Sistema Financiero MundialDocumento1 páginaImportancia de Los Cajeros Automáticos en El Sistema Financiero MundialAna LuisaAinda não há avaliações
- Macro Excel Mantenimiento PreventivoDocumento97 páginasMacro Excel Mantenimiento PreventivoEdgar GaribayAinda não há avaliações
- Cuaderno de Ejercicios para El Periodo Del 08 Al 22 de FebreroDocumento10 páginasCuaderno de Ejercicios para El Periodo Del 08 Al 22 de FebreroAntonio Herrerías SanabriaAinda não há avaliações
- Aplicaciones de La TermoelectricidadDocumento3 páginasAplicaciones de La TermoelectricidadJose AmayaAinda não há avaliações
- Calculo Disponibilidad Contractual Alquiler de Equipos-RevmalvarezDocumento6 páginasCalculo Disponibilidad Contractual Alquiler de Equipos-Revmalvarezbranco chavezAinda não há avaliações
- Catalogo de Conceptos LermaDocumento14 páginasCatalogo de Conceptos LermaNitzi CuautleAinda não há avaliações
- ADocumento13 páginasATommyAinda não há avaliações
- Fusionista para TubosDocumento2 páginasFusionista para TubosyerkoAinda não há avaliações
- Casos de ArmazonesDocumento8 páginasCasos de ArmazonesDiegoUrbinaSanchezAinda não há avaliações
- Naturaleza de La GerenciaDocumento3 páginasNaturaleza de La Gerenciacesarmax_1Ainda não há avaliações
- FijACIÓN DE ELEMENTOS SECUNDARIOS PDFDocumento14 páginasFijACIÓN DE ELEMENTOS SECUNDARIOS PDFMarcelo San MartinAinda não há avaliações
- Conectar Una Base de Datos MySQL de Forma RemotaDocumento4 páginasConectar Una Base de Datos MySQL de Forma RemotaAlex ArriagadaAinda não há avaliações
- NCh2121 1 1991 PDFDocumento9 páginasNCh2121 1 1991 PDFDiego VargasAinda não há avaliações
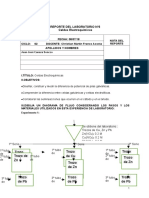
- Reporte de Laboratorio - ElectroquímicaDocumento7 páginasReporte de Laboratorio - ElectroquímicaBrandom Rydber ArcanaAinda não há avaliações
- Secuencia de Control 1 Monoestable PDFDocumento12 páginasSecuencia de Control 1 Monoestable PDFJose Maria Hernandez GarciaAinda não há avaliações
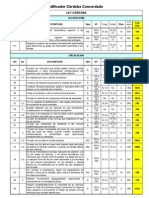
- Codificador Córdoba ConcordadoDocumento17 páginasCodificador Córdoba ConcordadokovalyanziAinda não há avaliações
- Presupuesto Arquitectonico para La Construccion de ViviendaDocumento13 páginasPresupuesto Arquitectonico para La Construccion de ViviendasecretariaAinda não há avaliações
- Hay Muchos Tipos de Efectos de Sonido en FL StudioDocumento8 páginasHay Muchos Tipos de Efectos de Sonido en FL StudioJuan Fernando Pocori Fernandez100% (1)
- Guía 07 Calor Latente EvaporacionDocumento3 páginasGuía 07 Calor Latente EvaporacionAndres IsaacsAinda não há avaliações
- Biodiesel - Homer Metodo Artesanels de Fabricacion Del BiodiesselDocumento5 páginasBiodiesel - Homer Metodo Artesanels de Fabricacion Del BiodiesselLuis Gonzalo Diaz AcevedoAinda não há avaliações
- NT-CR-F07 Declaración de Confidencialidad Auditorias 20201214Documento3 páginasNT-CR-F07 Declaración de Confidencialidad Auditorias 20201214Jose RomeroAinda não há avaliações
- Manual de Partes Venom 18 Ene 2024Documento51 páginasManual de Partes Venom 18 Ene 2024motocartoritoAinda não há avaliações
- Manual de Linde - Diesel - SerieH PDFDocumento304 páginasManual de Linde - Diesel - SerieH PDFTeo Rodriguez Alonso100% (5)
- Charla Inductiva BPMMDocumento41 páginasCharla Inductiva BPMMRohan Antonio Reyes BravoAinda não há avaliações
- 2 Atajado PDFDocumento4 páginas2 Atajado PDFCord Javi NicoAinda não há avaliações
- Unidad.4.Instalaciones de GasDocumento19 páginasUnidad.4.Instalaciones de Gasmariana cahuichAinda não há avaliações
- Nte Inen Iso 3779-1extractoDocumento4 páginasNte Inen Iso 3779-1extractodominic1107Ainda não há avaliações