Você também pode gostar
- Introduction to the Explicit Finite Element Method for Nonlinear Transient DynamicsNo EverandIntroduction to the Explicit Finite Element Method for Nonlinear Transient DynamicsAinda não há avaliações
- Hibbeler, Mechanics of Materials-Transverse Shear 1Documento29 páginasHibbeler, Mechanics of Materials-Transverse Shear 1poom2007Ainda não há avaliações
- Hibbeler, Mechanics of Materials-Stress Transformation 2Documento69 páginasHibbeler, Mechanics of Materials-Stress Transformation 2poom2007Ainda não há avaliações
- Elastic, Plastic and Yield Design of Reinforced StructuresNo EverandElastic, Plastic and Yield Design of Reinforced StructuresAinda não há avaliações
- Ch09 Stress TransformationDocumento116 páginasCh09 Stress TransformationMatthew MartinezAinda não há avaliações
- Hibbeler, Mechanics of Materials-Bending 2Documento68 páginasHibbeler, Mechanics of Materials-Bending 2poom2007Ainda não há avaliações
- Hibbeler, Mechanics of Materials-Prismatic Beam DesignDocumento50 páginasHibbeler, Mechanics of Materials-Prismatic Beam Designpoom2007Ainda não há avaliações
- Mechanics of Materials 1Documento304 páginasMechanics of Materials 1opulithe100% (2)
- Beer MaterialesDocumento15 páginasBeer MaterialesnannybobAinda não há avaliações
- 1 IntroductionDocumento25 páginas1 IntroductionNaveenesh Raj100% (1)
- Statics NoteDocumento26 páginasStatics NoteMei GuanAinda não há avaliações
- Hibbeler, Mechanics of Materials-Stress TransformationDocumento47 páginasHibbeler, Mechanics of Materials-Stress Transformationpoom2007Ainda não há avaliações
- Manual For Computational Exercises: TMM4160 Fracture MechanicsDocumento39 páginasManual For Computational Exercises: TMM4160 Fracture Mechanicsc1315491_513486021Ainda não há avaliações
- 9 Beam Deflection-Mechanics of MaterialsDocumento34 páginas9 Beam Deflection-Mechanics of MaterialsNhân Trần100% (1)
- C9789810694364SM PDFDocumento34 páginasC9789810694364SM PDFJohnrey FlandezAinda não há avaliações
- 5 BeamsDocumento22 páginas5 BeamsSheik MohamedAinda não há avaliações
- 08032012-Nice PPT Strain TransformationDocumento124 páginas08032012-Nice PPT Strain Transformationمحمد عادل خٹکAinda não há avaliações
- Strain Energy Part 1Documento20 páginasStrain Energy Part 1aalijanaabAinda não há avaliações
- Theory of Elasticity and PlasticityDocumento2 páginasTheory of Elasticity and PlasticityNaren GujjarAinda não há avaliações
- Stiffness MatrixDocumento22 páginasStiffness MatrixArun Sunny100% (1)
- Finite Difference Buckling Analysis of Non Uniform ColumnsDocumento8 páginasFinite Difference Buckling Analysis of Non Uniform ColumnsumeshapkAinda não há avaliações
- Mirzaei FractureMechanicsLectureDocumento137 páginasMirzaei FractureMechanicsLectureElias Kapa100% (1)
- Outline of Lecture 8: Structural DynamicsDocumento49 páginasOutline of Lecture 8: Structural DynamicsAnish PaiAinda não há avaliações
- Gaussian QuadratureDocumento24 páginasGaussian QuadratureAbera DeressaAinda não há avaliações
- Strain EnergyDocumento14 páginasStrain EnergyBright MuzaAinda não há avaliações
- Hibbeler, Mechanics of Materials-Deflections 1Documento57 páginasHibbeler, Mechanics of Materials-Deflections 1poom2007Ainda não há avaliações
- FEM Notes - IIT KharagpurDocumento308 páginasFEM Notes - IIT KharagpurAditya Singh100% (1)
- Problem Set No.1-MidtermDocumento31 páginasProblem Set No.1-MidtermROYCE1983Ainda não há avaliações
- Introduction To Finite Element Method (FEM)Documento22 páginasIntroduction To Finite Element Method (FEM)goldencomet100% (1)
- 9 Beam DeflectionDocumento36 páginas9 Beam DeflectionmaycollAinda não há avaliações
- Castigliano's Second TheoremDocumento10 páginasCastigliano's Second TheoremJorge Sotelo Sajami0% (1)
- Theory of PlatesDocumento17 páginasTheory of PlatesMaha Moddather Hassan100% (1)
- Mechanics of MaterialsDocumento478 páginasMechanics of MaterialsJames Nelson100% (1)
- 6 - Engesser's Theorem and Truss Deflections by Virtual Work PrinciplesDocumento14 páginas6 - Engesser's Theorem and Truss Deflections by Virtual Work PrinciplesFrans Alen SarmientoAinda não há avaliações
- CE 308 - Lec 9 - Flexural Analysis and Design of BeamsDocumento62 páginasCE 308 - Lec 9 - Flexural Analysis and Design of BeamsAli BajwaAinda não há avaliações
- Theory of Elasticity - Structural EngineeringDocumento7 páginasTheory of Elasticity - Structural EngineeringVijay Aravind100% (1)
- Strain: Strength of MaterialsDocumento5 páginasStrain: Strength of MaterialsDon MatiasAinda não há avaliações
- Abaqus - Nonlinear Analysis of Reinforced Concrete Beam Experimentation2015Documento5 páginasAbaqus - Nonlinear Analysis of Reinforced Concrete Beam Experimentation2015oioAinda não há avaliações
- L15 - Deflection-Conjugate Beam MethodDocumento18 páginasL15 - Deflection-Conjugate Beam MethodRaghul TAinda não há avaliações
- Non Linear Solver Arc Length ControlDocumento26 páginasNon Linear Solver Arc Length Controlashok.whyo100% (1)
- Plastic AnalysisDocumento37 páginasPlastic AnalysisChan Keng ChunAinda não há avaliações
- H Sections PDFDocumento9 páginasH Sections PDFBouQan EynstenAinda não há avaliações
- Unit 4 Plastic Behaviour of Structural SteelDocumento37 páginasUnit 4 Plastic Behaviour of Structural SteelMahesh KumarAinda não há avaliações
- Mechanics of MaterialsDocumento36 páginasMechanics of MaterialsHaseeb RiazAinda não há avaliações
- Chapter 1 RC Column Design SlidesDocumento28 páginasChapter 1 RC Column Design SlidesMesfin Derbew100% (9)
- Direct Stiffness MethodDocumento6 páginasDirect Stiffness MethodMuhammad Shahid HussainAinda não há avaliações
- ME Structures Theory Elasticity PlasticityDocumento3 páginasME Structures Theory Elasticity PlasticityameykatdareAinda não há avaliações
- Plastic Analysis Notes PDFDocumento14 páginasPlastic Analysis Notes PDFVineetha KrishnanAinda não há avaliações
- Plastic Analysis 1011 PDFDocumento136 páginasPlastic Analysis 1011 PDFMarcos SilveiraAinda não há avaliações
- MECHANICS II MECHANICS OF MATERIALS Eboo PDFDocumento496 páginasMECHANICS II MECHANICS OF MATERIALS Eboo PDFNancyAinda não há avaliações
- TorsionDocumento49 páginasTorsionBandula PrasadAinda não há avaliações
- Slope Deflection MethodDocumento8 páginasSlope Deflection Methodpankaj_97Ainda não há avaliações
- C05 - Stationary Potential EnergyDocumento73 páginasC05 - Stationary Potential Energyyttan1116Ainda não há avaliações
- Plastic Analysis 1011Documento129 páginasPlastic Analysis 1011Omkar Bapat0% (1)
- Theory of Elasticity and PlasticityDocumento12 páginasTheory of Elasticity and PlasticityBharathi RajAinda não há avaliações
- Finite Element Method An Overview PDFDocumento8 páginasFinite Element Method An Overview PDFMuller AsmareAinda não há avaliações
- The Uniform Force MothodDocumento4 páginasThe Uniform Force MothodJoaquin Ignacio Concha NúñezAinda não há avaliações
- Assignment 1 2Documento2 páginasAssignment 1 2TsiNat Natha100% (4)
- Chapter Objectives: 2005 Pearson Education South Asia Pte LTDDocumento27 páginasChapter Objectives: 2005 Pearson Education South Asia Pte LTDpoom2007Ainda não há avaliações
- DeflectionDocumento63 páginasDeflectionsteven6967Ainda não há avaliações
- Distributed Across The Thickness of The Tube: 5.7 Thin-Walled Tubes Having Closed Cross SectionsDocumento38 páginasDistributed Across The Thickness of The Tube: 5.7 Thin-Walled Tubes Having Closed Cross Sectionspoom2007Ainda não há avaliações
- Hibbeler, Mechanics of Materials-Strain Transformation 2Documento62 páginasHibbeler, Mechanics of Materials-Strain Transformation 2poom2007Ainda não há avaliações
- Hibbeler, Mechanics of Materials-Deflections 1Documento57 páginasHibbeler, Mechanics of Materials-Deflections 1poom2007Ainda não há avaliações
- Hibbeler, Mechanics of Materials-Transverse Shear 2Documento39 páginasHibbeler, Mechanics of Materials-Transverse Shear 2poom2007Ainda não há avaliações
- Hibbeler, Mechanics of Materials-Transverse Shear 2Documento39 páginasHibbeler, Mechanics of Materials-Transverse Shear 2poom2007Ainda não há avaliações
- Hibbeler, Mechanics of Materials-Strain TransformationDocumento62 páginasHibbeler, Mechanics of Materials-Strain Transformationpoom2007Ainda não há avaliações
- Hibbeler, Mechanics of Materials-Stress TransformationDocumento47 páginasHibbeler, Mechanics of Materials-Stress Transformationpoom2007Ainda não há avaliações
- Chapter 9 Solid State Phase TransformationDocumento18 páginasChapter 9 Solid State Phase Transformationpoom2007Ainda não há avaliações
- MOM2 Echap 1 ADocumento45 páginasMOM2 Echap 1 AJules NanaAinda não há avaliações
- MOM2E Chap3bDocumento33 páginasMOM2E Chap3bpoom2007Ainda não há avaliações
- MOM2E Chap2aDocumento16 páginasMOM2E Chap2apoom2007Ainda não há avaliações
- Hot-Dip CoatingDocumento19 páginasHot-Dip Coatingpoom2007Ainda não há avaliações
- MOM2E Chap1bDocumento33 páginasMOM2E Chap1bpoom2007Ainda não há avaliações
- Cold RollingDocumento8 páginasCold Rollingpoom2007Ainda não há avaliações
- Hot RollingDocumento10 páginasHot Rollingpoom2007Ainda não há avaliações
- Chapter 7 Recovery, Recrystallization, Grain GrowthDocumento19 páginasChapter 7 Recovery, Recrystallization, Grain Growthpoom2007Ainda não há avaliações
- Chapter 6 Mechanical PropertiesDocumento31 páginasChapter 6 Mechanical Propertiespoom2007Ainda não há avaliações
- Chapter 4 Phase DiagramDocumento24 páginasChapter 4 Phase Diagrampoom2007Ainda não há avaliações
- Chap 5 (Beams and Cables)Documento35 páginasChap 5 (Beams and Cables)Nurul Nadia Mior Rahim100% (2)
- Chapter 04Documento78 páginasChapter 04Bikash Chandra DasAinda não há avaliações
- CH4 Internal Loadings Developed in Structural MembersDocumento34 páginasCH4 Internal Loadings Developed in Structural MembersKong VisalAinda não há avaliações
- Module 2 Shear and Moment in Determinate BeamsDocumento13 páginasModule 2 Shear and Moment in Determinate Beamsatingelaay YAinda não há avaliações
- Module 6 - Shear and Moment in Beams by Method of Area - ARCH31S6Documento39 páginasModule 6 - Shear and Moment in Beams by Method of Area - ARCH31S6Rose Anne ApiladoAinda não há avaliações
- ESC19 Lecture 12 Shear and Moment Diagrams Moving LoadsDocumento22 páginasESC19 Lecture 12 Shear and Moment Diagrams Moving LoadsRiben CaratingAinda não há avaliações
- Shear and Moment DiagramDocumento10 páginasShear and Moment DiagramDon MatiasAinda não há avaliações
- Divine Word College of Calapan: School of Engineering and ArchitectureDocumento2 páginasDivine Word College of Calapan: School of Engineering and ArchitectureMicko LaneluzAinda não há avaliações
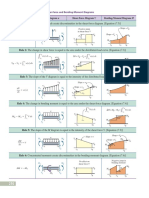
- Equation Load Diagram W Shear-Force Diagram V Bending-Moment Diagram MDocumento1 páginaEquation Load Diagram W Shear-Force Diagram V Bending-Moment Diagram MAndres Felipe Prieto AlarconAinda não há avaliações
- Design in Reinforced Concrete To BS 8110 1Documento14 páginasDesign in Reinforced Concrete To BS 8110 1Anish KumarAinda não há avaliações
- CE 382 L6 - Shear and Moment Diagrams PDFDocumento42 páginasCE 382 L6 - Shear and Moment Diagrams PDFparamarthasom1974Ainda não há avaliações
- Mechanics of Materials: Analysis and Design of Beams For BendingDocumento37 páginasMechanics of Materials: Analysis and Design of Beams For BendingZeeshan SaeedAinda não há avaliações
- Analysis of Statically Indeterminate Structures by The Force MethodDocumento57 páginasAnalysis of Statically Indeterminate Structures by The Force MethodArvin ArviniAinda não há avaliações
- Deflections - Work-Energy MethodsDocumento52 páginasDeflections - Work-Energy MethodsZahretpalestineAinda não há avaliações
- Lecture 8 Problems On SFD and BMD On Beams With Point LoadsDocumento33 páginasLecture 8 Problems On SFD and BMD On Beams With Point Loadsshaheer asifAinda não há avaliações
- 00 Shear Force and Bending Moment DiagramsDocumento3 páginas00 Shear Force and Bending Moment DiagramsCholan PillaiAinda não há avaliações
- CE 103 Structural AnalysisDocumento80 páginasCE 103 Structural AnalysisasdasAinda não há avaliações
- Cabana Plc. TestDocumento3 páginasCabana Plc. TestNathan yemaneAinda não há avaliações
- Determinate Beams S.F.D & B.M.D Mubarak Roja 2020Documento126 páginasDeterminate Beams S.F.D & B.M.D Mubarak Roja 2020Abdelhamid MaymonAinda não há avaliações
- Lecture 6aDocumento8 páginasLecture 6aJessa Clarisse CrisostomoAinda não há avaliações
- Bending Moments DiagramDocumento27 páginasBending Moments DiagramAlexander Appiah OkoreAinda não há avaliações
- Rohini 84650769189Documento14 páginasRohini 84650769189adultankanAinda não há avaliações
- GCV401 - Structural Analysis - Chapter IV - Internal Loadings Developed in Structural MembersDocumento11 páginasGCV401 - Structural Analysis - Chapter IV - Internal Loadings Developed in Structural MembersOec EngAinda não há avaliações
- CVL312 Lecture 1Documento22 páginasCVL312 Lecture 1Jay100% (1)
- Chapter 5Documento49 páginasChapter 5ISRAEL HAILUAinda não há avaliações
- L6 - Shear and Moment DiagramsDocumento11 páginasL6 - Shear and Moment DiagramsSuman BhattaraiAinda não há avaliações
- Shear and Moment Diagrams On FramesDocumento22 páginasShear and Moment Diagrams On FramesRonald Llemit TominesAinda não há avaliações
- Simple Harmonic Motion and Free VibrationDocumento25 páginasSimple Harmonic Motion and Free VibrationSANJAY KUMAR MISHRAAinda não há avaliações
- Structural Analysis Theory Ii: (Statically Indeterminate Structure)Documento16 páginasStructural Analysis Theory Ii: (Statically Indeterminate Structure)Adonis C. BibatAinda não há avaliações
- Week 7 - Lecture 1 - CE 2011 Structural Analysis IDocumento10 páginasWeek 7 - Lecture 1 - CE 2011 Structural Analysis IGuhananth GuhaAinda não há avaliações