Você também pode gostar
- Discrete Orthogonal Polynomials. (AM-164): Asymptotics and Applications (AM-164)No EverandDiscrete Orthogonal Polynomials. (AM-164): Asymptotics and Applications (AM-164)Ainda não há avaliações
- Semiclassical Soliton Ensembles for the Focusing Nonlinear Schrödinger Equation (AM-154)No EverandSemiclassical Soliton Ensembles for the Focusing Nonlinear Schrödinger Equation (AM-154)Ainda não há avaliações
- Stiffness by Definition and The Direct Stiffness MethodDocumento56 páginasStiffness by Definition and The Direct Stiffness MethodSmartEngineerAinda não há avaliações
- 3.finite Element Formulation For Truss1Documento75 páginas3.finite Element Formulation For Truss1dawit gashuAinda não há avaliações
- Lecture 3 FEAShapeFunctions1DDocumento24 páginasLecture 3 FEAShapeFunctions1DatilolaAinda não há avaliações
- Introduction To Stiffness MethodDocumento14 páginasIntroduction To Stiffness Methodapi-3813327100% (1)
- 337 ch2Documento36 páginas337 ch2eseemAinda não há avaliações
- Topic 2 Flexibilty MethodDocumento134 páginasTopic 2 Flexibilty Methodazerai2000Ainda não há avaliações
- 2 - Stiffness Method - Analysis of A System of SpringsDocumento21 páginas2 - Stiffness Method - Analysis of A System of SpringsdhgrfrhkwuibfwdlrxAinda não há avaliações
- L11 - Force Method PDFDocumento11 páginasL11 - Force Method PDFBondanAsmoroAinda não há avaliações
- Introduction To The Stiffness (Displacement) Method: Analysis of A System of SpringsDocumento43 páginasIntroduction To The Stiffness (Displacement) Method: Analysis of A System of SpringsmmgaribayAinda não há avaliações
- CE645 Discussion 1 Interaction HandoutDocumento8 páginasCE645 Discussion 1 Interaction HandoutJoy MondalAinda não há avaliações
- Kesetimbangan Partikel Dan Keseimbangan Benda TegarDocumento25 páginasKesetimbangan Partikel Dan Keseimbangan Benda TegarEka NugrahaAinda não há avaliações
- SRM Institute of Science and Technology: 18Mee305T - Finite Element MethodDocumento45 páginasSRM Institute of Science and Technology: 18Mee305T - Finite Element MethodjumkalakaAinda não há avaliações
- Finite Element Method: Main Applications: Field ProblemsDocumento29 páginasFinite Element Method: Main Applications: Field ProblemsHossein NajjarzadeAinda não há avaliações
- FE Sheet Topics 5 To 8Documento8 páginasFE Sheet Topics 5 To 8Sir RickSolAinda não há avaliações
- Chapter 2 Axial and Torsional ElementsDocumento57 páginasChapter 2 Axial and Torsional ElementsAhmad FaidhiAinda não há avaliações
- FEM Msm1333 Chap3.2 Spring TrussDocumento88 páginasFEM Msm1333 Chap3.2 Spring TrussNebiyou KoAinda não há avaliações
- Finite Elements For Modeling Bridge ComponentsDocumento83 páginasFinite Elements For Modeling Bridge ComponentsK KajeenthanAinda não há avaliações
- CH 3 Statics Problems 2-D and 3-DDocumento19 páginasCH 3 Statics Problems 2-D and 3-Dzaczek05Ainda não há avaliações
- Introduction To The Stiffness (Displacement) Method: Analysis of A System of SpringsDocumento42 páginasIntroduction To The Stiffness (Displacement) Method: Analysis of A System of SpringsFaryal BatoolAinda não há avaliações
- Marking Schemes PhysicDocumento9 páginasMarking Schemes PhysicahmadbukhariofficalAinda não há avaliações
- Presentation 3Documento62 páginasPresentation 3leleparthaAinda não há avaliações
- Lecture 3Documento150 páginasLecture 3Kedir ShiferawAinda não há avaliações
- Lecture - Force MethodDocumento73 páginasLecture - Force MethodF FAinda não há avaliações
- Elementos FinitosDocumento72 páginasElementos FinitosPedro Leos100% (1)
- EMAE 415 Lectures Finite Element Analysis - Basic ConceptsDocumento72 páginasEMAE 415 Lectures Finite Element Analysis - Basic ConceptsPedro LeosAinda não há avaliações
- Chapter 4.1 - Direct Stiffness Method - StructuralDocumento49 páginasChapter 4.1 - Direct Stiffness Method - Structuralsanyam KanungaAinda não há avaliações
- One Degree of Freedom Vibration Beam ManualDocumento3 páginasOne Degree of Freedom Vibration Beam ManualLight OneAinda não há avaliações
- Toe SeminarDocumento13 páginasToe Seminarajithkr4114Ainda não há avaliações
- Finite Element Analysis: Level 6, Semester 1&2 2022-2023Documento23 páginasFinite Element Analysis: Level 6, Semester 1&2 2022-2023Sara HaiderAinda não há avaliações
- Stiffness Method - Truss (Part 1)Documento42 páginasStiffness Method - Truss (Part 1)Leediya AfrinaAinda não há avaliações
- Free Vibration 2 DampedDocumento18 páginasFree Vibration 2 DampedCynthia SimonAinda não há avaliações
- Topic 6 - Matrix MethodDocumento13 páginasTopic 6 - Matrix MethodRaphael KennethAinda não há avaliações
- Matrix Structural Analysis: Degrees of Freedom (DOF)Documento10 páginasMatrix Structural Analysis: Degrees of Freedom (DOF)Jordan Empensando OliverosAinda não há avaliações
- Spring ElementDocumento41 páginasSpring ElementMuhamad FirdausAinda não há avaliações
- Frame MethodDocumento3 páginasFrame MethodaliAinda não há avaliações
- 1Documento15 páginas1manognya salendraAinda não há avaliações
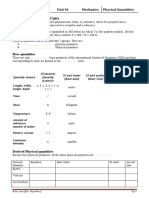
- U01 - Mec - Physical QuantitiesDocumento10 páginasU01 - Mec - Physical QuantitiesTesting AcountAinda não há avaliações
- 3 Beam AnalysisDocumento15 páginas3 Beam AnalysisSteven KuaAinda não há avaliações
- 2D ElementDocumento22 páginas2D ElementGabriel ChungAinda não há avaliações
- Design Via Root Locus NewDocumento39 páginasDesign Via Root Locus NewLaluAinda não há avaliações
- b4 Subatomic PhysicsDocumento62 páginasb4 Subatomic PhysicsAndrew OrrAinda não há avaliações
- Unit 5. Finite Element AnalysisDocumento48 páginasUnit 5. Finite Element AnalysiskalpeshavgifyAinda não há avaliações
- Key - 2544427 - 2023-11-28 08 - 20 - 33 +0000Documento27 páginasKey - 2544427 - 2023-11-28 08 - 20 - 33 +0000Sarthak BaliyanAinda não há avaliações
- Truss Matrix Chapter 5Documento84 páginasTruss Matrix Chapter 5haziq100% (1)
- CE 6109-Chapter 2Documento17 páginasCE 6109-Chapter 2Mahbub AlamAinda não há avaliações
- Bars and Trusses: ME 206T Unit-I Lecture-IIIDocumento21 páginasBars and Trusses: ME 206T Unit-I Lecture-IIIRamsingh MeenaAinda não há avaliações
- CFSS IntroductionDocumento83 páginasCFSS IntroductionSri RamAinda não há avaliações
- Structural Analysis Formula Notes 99Documento17 páginasStructural Analysis Formula Notes 99loadienge3Ainda não há avaliações
- Example 2.1: Metode Elemen Hingga (Finite Elemen Analysis)Documento14 páginasExample 2.1: Metode Elemen Hingga (Finite Elemen Analysis)K2 Zai99Ainda não há avaliações
- Chapter 3a - Compression MembersDocumento28 páginasChapter 3a - Compression MemberspubaccAinda não há avaliações
- Introduction To FEA: Won Hyun ParkDocumento25 páginasIntroduction To FEA: Won Hyun Park04935Ainda não há avaliações
- 03 - Particle Equilibrium 20-21Documento59 páginas03 - Particle Equilibrium 20-21Ahmed AbdelmaksoudAinda não há avaliações
- Introduction To The Stiffness (Displacement) Method: Analysis of A System of SpringsDocumento43 páginasIntroduction To The Stiffness (Displacement) Method: Analysis of A System of SpringsUmair ShafiqAinda não há avaliações
- 6 SpringsDocumento42 páginas6 Springsكلية الهندسة - محاضرAinda não há avaliações
- Daryl L. Logan - A First Course in The Finite Element Method-CL Engineering - Cengage Learning (2016) (1) (0060-0080)Documento21 páginasDaryl L. Logan - A First Course in The Finite Element Method-CL Engineering - Cengage Learning (2016) (1) (0060-0080)Nurul FaoziahAinda não há avaliações
- The Geometry and Cohomology of Some Simple Shimura Varieties. (AM-151), Volume 151No EverandThe Geometry and Cohomology of Some Simple Shimura Varieties. (AM-151), Volume 151Ainda não há avaliações
- Critique Paper On Exploring Complex NetworksDocumento2 páginasCritique Paper On Exploring Complex Networksiking_balonAinda não há avaliações
- SHM ModulesDocumento14 páginasSHM Modulesiking_balonAinda não há avaliações
- Summary & Key Takeaways of The Paper An Extreme Learning Machine-Based Community Detection Algorithm in Complex NetworksDocumento3 páginasSummary & Key Takeaways of The Paper An Extreme Learning Machine-Based Community Detection Algorithm in Complex Networksiking_balonAinda não há avaliações
- Outline For Presentation 05022023Documento2 páginasOutline For Presentation 05022023iking_balonAinda não há avaliações
- Topical Outline For An Extreme Learning Machine-Based Community Detection Algorithm in Complex NetworksDocumento7 páginasTopical Outline For An Extreme Learning Machine-Based Community Detection Algorithm in Complex Networksiking_balonAinda não há avaliações
- Topic1 DOST Infra HandoutDocumento95 páginasTopic1 DOST Infra Handoutiking_balonAinda não há avaliações
- TIP MLA Thesis Chapter 2 (11 06 2022)Documento10 páginasTIP MLA Thesis Chapter 2 (11 06 2022)iking_balonAinda não há avaliações
- ICIASDFC - 22-Jakarta, IndonesiaDocumento70 páginasICIASDFC - 22-Jakarta, Indonesiaiking_balonAinda não há avaliações
- RESEARCH-GROUP-68-CHAPTER-1 (With Comments)Documento9 páginasRESEARCH-GROUP-68-CHAPTER-1 (With Comments)iking_balonAinda não há avaliações
- Objectives of The Study For Group 68Documento1 páginaObjectives of The Study For Group 68iking_balonAinda não há avaliações
- Reviewedversion ANIDIS DAmoreetal.2022Documento8 páginasReviewedversion ANIDIS DAmoreetal.2022iking_balonAinda não há avaliações
- The Philippines in 1991 Disasters and DecisionsDocumento7 páginasThe Philippines in 1991 Disasters and Decisionsiking_balonAinda não há avaliações
- Chapter-1-10 19 22Documento10 páginasChapter-1-10 19 22iking_balonAinda não há avaliações
- A Machine-Learning Method For Deriving State-Dependent Fragility Curves ofDocumento15 páginasA Machine-Learning Method For Deriving State-Dependent Fragility Curves ofiking_balonAinda não há avaliações
- Solving The Blotto Game - A Computational ApproachDocumento19 páginasSolving The Blotto Game - A Computational Approachiking_balonAinda não há avaliações
- Thesis Adviser Relieve (Escuro)Documento1 páginaThesis Adviser Relieve (Escuro)iking_balonAinda não há avaliações
- Colonel Blotto Model - Prisoner's DilemmaDocumento15 páginasColonel Blotto Model - Prisoner's Dilemmaiking_balonAinda não há avaliações
- PhDinDS2025 MTAC TopicsDocumento1 páginaPhDinDS2025 MTAC Topicsiking_balonAinda não há avaliações
- Report 11 18 2022Documento27 páginasReport 11 18 2022iking_balonAinda não há avaliações
- Example Junior Presentation - Prisoners DilemmaDocumento17 páginasExample Junior Presentation - Prisoners Dilemmaiking_balonAinda não há avaliações
- Solving The Blotto Game - A Computational ApproachDocumento19 páginasSolving The Blotto Game - A Computational Approachiking_balonAinda não há avaliações
- Gilroy 1Documento1 páginaGilroy 1iking_balonAinda não há avaliações
- AdU Presentation 04 06 2022Documento29 páginasAdU Presentation 04 06 2022iking_balonAinda não há avaliações
- Transfer Credential FormDocumento1 páginaTransfer Credential Formiking_balonAinda não há avaliações
- Payment of Fees InfoDocumento1 páginaPayment of Fees Infoiking_balonAinda não há avaliações
- (SAMPLE) PHD Data Science 2024 (Intake Oct. 2021) Schedule of FeesDocumento1 página(SAMPLE) PHD Data Science 2024 (Intake Oct. 2021) Schedule of Feesiking_balonAinda não há avaliações
- SCRIPT-FOR-GOCLEAN-GIZMO (Emby)Documento1 páginaSCRIPT-FOR-GOCLEAN-GIZMO (Emby)iking_balonAinda não há avaliações
- SCRIPT-ERI-MAX-EDITED by Clinton MadriagaDocumento1 páginaSCRIPT-ERI-MAX-EDITED by Clinton Madriagaiking_balonAinda não há avaliações
- TR 14 01Documento103 páginasTR 14 01iking_balonAinda não há avaliações
- Weekly Webinar Programs For OJT ITSRDocumento2 páginasWeekly Webinar Programs For OJT ITSRiking_balonAinda não há avaliações
- Statics - FrictionDocumento9 páginasStatics - FrictionEuw Chaiwanont0% (2)
- Physics Notes PDF For Class 9Documento3 páginasPhysics Notes PDF For Class 9Mithilesh Kr Prem100% (1)
- Eec207: Electromagnetic Waves L T P C 3 1 0 4Documento2 páginasEec207: Electromagnetic Waves L T P C 3 1 0 4Naresh KumarAinda não há avaliações
- Da 2 - Efa PDFDocumento4 páginasDa 2 - Efa PDFAnish ChakrabartiAinda não há avaliações
- Standardized Excel Sheet For Design of Ring Wall Foundation of Tanks 2610Documento10 páginasStandardized Excel Sheet For Design of Ring Wall Foundation of Tanks 2610Rama Subramanyam Manepalli100% (2)
- Viscosity MeasurementDocumento8 páginasViscosity MeasurementRian SteveAinda não há avaliações
- Test Bank: Chapter 1, Problem 2Documento12 páginasTest Bank: Chapter 1, Problem 2miladAinda não há avaliações
- Stress Analysis of Pressure Vessels Based On ANSYSDocumento4 páginasStress Analysis of Pressure Vessels Based On ANSYSsandeeppandey0789Ainda não há avaliações
- Building Construction 1 - 5 - Floors Vaults PDFDocumento33 páginasBuilding Construction 1 - 5 - Floors Vaults PDFDamjanAinda não há avaliações
- Chapter 04equillibriumDocumento11 páginasChapter 04equillibriumSamir GedamAinda não há avaliações
- Forces in ActionDocumento23 páginasForces in Actionapi-422428700100% (1)
- Design All (Hmax 115')Documento76 páginasDesign All (Hmax 115')nayeem_rayhanAinda não há avaliações
- 5 - G - Aguila Shaft DesignDocumento7 páginas5 - G - Aguila Shaft DesignJonas M. MagbooAinda não há avaliações
- Physics Chapter 4 ProblemsDocumento22 páginasPhysics Chapter 4 ProblemscjbthegeniusAinda não há avaliações
- Design and Detailing of Retaining WallsDocumento54 páginasDesign and Detailing of Retaining WallsBrahman Pathakji PradumnAinda não há avaliações
- Philip Oloibe Soil Mech ReportDocumento9 páginasPhilip Oloibe Soil Mech Reportsydney augustAinda não há avaliações
- A Handbook: Epicyclic GearingDocumento8 páginasA Handbook: Epicyclic GearingrafeipAinda não há avaliações
- Hydrostatic Force On Plane SurfacesDocumento3 páginasHydrostatic Force On Plane SurfaceskarthikAinda não há avaliações
- P H RefinementDocumento6 páginasP H RefinementVikas TopeAinda não há avaliações
- ANSYS Mechanical APDL Theory Reference PDFDocumento908 páginasANSYS Mechanical APDL Theory Reference PDFNam Vo100% (1)
- Length Power Dynamic Viscosity Heat FluxDocumento9 páginasLength Power Dynamic Viscosity Heat FluxAnubhav KhandelwalAinda não há avaliações
- Introduction To Mechanical VibrationDocumento1 páginaIntroduction To Mechanical VibrationDomingo Joshua Eduard C.Ainda não há avaliações
- Theoretical Expectation of Strip Thickness in Planar Flow Casting ProcessDocumento6 páginasTheoretical Expectation of Strip Thickness in Planar Flow Casting Processsohrabi64Ainda não há avaliações
- Steady-State Water Flow in Porous Media: Hillel, 1982Documento5 páginasSteady-State Water Flow in Porous Media: Hillel, 1982mikiprofaAinda não há avaliações
- Modelling of Dynamic Stability Derivatives Using CFD: Sean Tuling Csir KeywordsDocumento9 páginasModelling of Dynamic Stability Derivatives Using CFD: Sean Tuling Csir KeywordsconqurerAinda não há avaliações
- Show That Natural Strains Are Additive While Conventional Strains Are Not. 2. Derive Equation 2.2.13. 3Documento4 páginasShow That Natural Strains Are Additive While Conventional Strains Are Not. 2. Derive Equation 2.2.13. 3shifatAinda não há avaliações
- Lecture Sheet 5 - Centroid & Moment of InertiaDocumento49 páginasLecture Sheet 5 - Centroid & Moment of InertiaNafin Afnan100% (1)
- SNAME T and R Bulletin 2 29A Vibration Measurement and Eval Jan 2004 T RDocumento68 páginasSNAME T and R Bulletin 2 29A Vibration Measurement and Eval Jan 2004 T RAnthonyAinda não há avaliações
- Elevated Rectangular Steel TankDocumento15 páginasElevated Rectangular Steel Tankvsdfsd258Ainda não há avaliações
- Science 9: 4 QuarterDocumento11 páginasScience 9: 4 QuarterTrevor James TjAinda não há avaliações