Você também pode gostar
- KOM Important QuestionsDocumento12 páginasKOM Important QuestionsJithin KAinda não há avaliações
- What Is Machine DesignDocumento54 páginasWhat Is Machine DesignPavan KishoreAinda não há avaliações
- Chapter 3 METROLOGY - IntroductionDocumento14 páginasChapter 3 METROLOGY - IntroductionMadhu pspkAinda não há avaliações
- Design of Machine Elements2Documento14 páginasDesign of Machine Elements2Satwik PriyadarshiAinda não há avaliações
- 12ed11 - Advanced Machine Tool DesignDocumento15 páginas12ed11 - Advanced Machine Tool DesignBradeesh MoorthyAinda não há avaliações
- MP 2 Unit II MachinabilityDocumento15 páginasMP 2 Unit II MachinabilitySuraj NKAinda não há avaliações
- Chapter 2-Belt Drive SystemDocumento29 páginasChapter 2-Belt Drive SystemDanielRao100% (1)
- Belts, Ropes and Chain DrivesDocumento29 páginasBelts, Ropes and Chain Drivesnaveen_kumar29173017100% (1)
- Pre-Planning FunctionDocumento10 páginasPre-Planning FunctionSandeep ChoudharyAinda não há avaliações
- CAM and FollowerDocumento13 páginasCAM and Followerpratik thakareAinda não há avaliações
- 322 F22 Lecture17 Yield Criteria Flow RulesDocumento41 páginas322 F22 Lecture17 Yield Criteria Flow RuleslokeshAinda não há avaliações
- Mechanics of Material - SyllabusDocumento2 páginasMechanics of Material - SyllabusRahul PatilAinda não há avaliações
- Unit Iii Visual RealismDocumento59 páginasUnit Iii Visual RealismJabin JoeAinda não há avaliações
- Types of ResistorDocumento9 páginasTypes of ResistorManuel Panotes ReantazoAinda não há avaliações
- Introduction To Power Screw AssingmentDocumento4 páginasIntroduction To Power Screw AssingmentZohaibShoukatBalochAinda não há avaliações
- Solution To Problem 203 Stress-Strain Diagram - Strength of Materials ReviewDocumento2 páginasSolution To Problem 203 Stress-Strain Diagram - Strength of Materials Reviewimrancenakk0% (1)
- Design of Modern CNC Machines and Mechatronic ElementsDocumento37 páginasDesign of Modern CNC Machines and Mechatronic Elementsnagappa talawarAinda não há avaliações
- Manufacturing Technology - I Unit - I: 2 Marks Question & AnswersDocumento15 páginasManufacturing Technology - I Unit - I: 2 Marks Question & AnswersSK NAGOOR VALI100% (1)
- Surface MicromachiningDocumento61 páginasSurface MicromachiningMannal JavedAinda não há avaliações
- AT6501 (R-13) Notes PDFDocumento131 páginasAT6501 (R-13) Notes PDFAashiq NawinAinda não há avaliações
- MT Ii 2 Marks PDFDocumento19 páginasMT Ii 2 Marks PDFParamasivam Veerappan100% (1)
- Unit I Fundamentals of Robot PDFDocumento12 páginasUnit I Fundamentals of Robot PDFAkash Prasanth100% (1)
- ME6601Documento28 páginasME6601Sridiwakaran ParameswaranAinda não há avaliações
- Notes Machine DesignDocumento13 páginasNotes Machine DesignVishak ReguAinda não há avaliações
- Definition For SpringDocumento18 páginasDefinition For SpringamanpurushothAinda não há avaliações
- Screw Threads: ME354 Albert ClaypoolDocumento13 páginasScrew Threads: ME354 Albert ClaypoolfotickAinda não há avaliações
- Multipurpose Robotic ArmDocumento7 páginasMultipurpose Robotic ArmIJRASETPublicationsAinda não há avaliações
- Design of Transmission System Question BankDocumento18 páginasDesign of Transmission System Question BankAravind50% (2)
- Rubber Plastics Glass MCQ IppiDocumento17 páginasRubber Plastics Glass MCQ IppiBien0% (1)
- Micro MillingDocumento38 páginasMicro MillingBhushan ChhatreAinda não há avaliações
- DOME-I Unit 1 - Lec 2Documento21 páginasDOME-I Unit 1 - Lec 2Gautam Gunjan100% (1)
- Economics of Metal CuttingDocumento10 páginasEconomics of Metal Cuttinghaile mehariAinda não há avaliações
- Gear TrainDocumento14 páginasGear TrainShiva SuprithAinda não há avaliações
- Review of Transducer and SensorDocumento113 páginasReview of Transducer and SensorSyedZameerAinda não há avaliações
- Unit-1-Basics of MetrologyDocumento42 páginasUnit-1-Basics of Metrologytamilselvan nAinda não há avaliações
- Theory of Machine Unit 1Documento122 páginasTheory of Machine Unit 1Deepak PrajapatAinda não há avaliações
- MMAM (21ME54), Assignment-2., 2023-24Documento1 páginaMMAM (21ME54), Assignment-2., 2023-24pranamnathanielrajAinda não há avaliações
- Belt Drive Types Material Applications Advantages Disadvantages PPT 1Documento19 páginasBelt Drive Types Material Applications Advantages Disadvantages PPT 1Sandesh yadavAinda não há avaliações
- Machine Design Lab ManualDocumento28 páginasMachine Design Lab ManualEr Raghvendra Singh100% (1)
- Seminar On Non-Destructive Testing: Submitted To: Submitted byDocumento25 páginasSeminar On Non-Destructive Testing: Submitted To: Submitted byMahesh TamboliAinda não há avaliações
- OIE 751 ROBOTICS Unit 2 Class 1 (26-8-2020)Documento10 páginasOIE 751 ROBOTICS Unit 2 Class 1 (26-8-2020)MICHEL RAJ0% (1)
- DCMTDocumento37 páginasDCMTGloria HolcombAinda não há avaliações
- Ec6702 Optical Communication and NetworksDocumento36 páginasEc6702 Optical Communication and NetworkssujithaAinda não há avaliações
- Mtech (Research) Rules For SVNIT SuratDocumento16 páginasMtech (Research) Rules For SVNIT SuratMukesh JindalAinda não há avaliações
- EIM PPT 1Documento17 páginasEIM PPT 1rahul0% (1)
- Design of Screw Jack Report FinalDocumento10 páginasDesign of Screw Jack Report Finaladitya kshirsagarAinda não há avaliações
- Microsystems and Micro ElectronicsDocumento2 páginasMicrosystems and Micro Electronics2K19/CO/076 ARJUAinda não há avaliações
- Automation in Manufacturing 10ME757: Department of Mechanical Engineering, SIRMVIT (Ramesh C G & Hanamantraygouda M B)Documento193 páginasAutomation in Manufacturing 10ME757: Department of Mechanical Engineering, SIRMVIT (Ramesh C G & Hanamantraygouda M B)Wtf rajuAinda não há avaliações
- Metallurgy and Material Science - Module 1Documento36 páginasMetallurgy and Material Science - Module 1Devasivan Csr100% (1)
- 1.1 Background of The StudyDocumento12 páginas1.1 Background of The StudyStephen DuamorAinda não há avaliações
- Introduction To UCMPDocumento27 páginasIntroduction To UCMPGowtham sivateja100% (2)
- Spur Gear Cutting On Universal Milling MachDocumento8 páginasSpur Gear Cutting On Universal Milling MachMurali SiddarthAinda não há avaliações
- Volumetric Efficiency For Reciprocating CompressorDocumento2 páginasVolumetric Efficiency For Reciprocating CompressorKrishna PATELAinda não há avaliações
- Grinding Lab 2Documento9 páginasGrinding Lab 2Ming QuanAinda não há avaliações
- Subject Metal Cutting and Tool Design de PDFDocumento2 páginasSubject Metal Cutting and Tool Design de PDFBabuli KumarAinda não há avaliações
- Servo SystemsDocumento17 páginasServo SystemsAzeem .kAinda não há avaliações
- UNIT-II - 2.servo, Hydraulics and PneumaticsDocumento33 páginasUNIT-II - 2.servo, Hydraulics and PneumaticsSgsksbskxvxk100% (1)
- UNIT-II-part-I .Servo, Hydraulics and Pneumatic & Electrical ActuatorsDocumento66 páginasUNIT-II-part-I .Servo, Hydraulics and Pneumatic & Electrical ActuatorsRajakumar SaiAinda não há avaliações
- Servo MotorDocumento31 páginasServo Motoradiamiru25% (4)
- Hbs86 and 86hbm80Documento3 páginasHbs86 and 86hbm80Cornel BordeiAinda não há avaliações
- 04 - Crystallogaphy III Miller Indices-Faces-Forms-EditedDocumento63 páginas04 - Crystallogaphy III Miller Indices-Faces-Forms-EditedMaisha MujibAinda não há avaliações
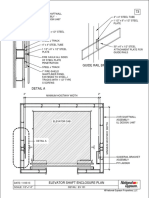
- Guide Rail Bracket AssemblyDocumento1 páginaGuide Rail Bracket AssemblyPrasanth VarrierAinda não há avaliações
- Goodman Aula 1 e 2Documento17 páginasGoodman Aula 1 e 2Danilo TetAinda não há avaliações
- Annexure I Project Details DateDocumento4 páginasAnnexure I Project Details DateAshish SinghaniaAinda não há avaliações
- Syllabus Math 305Documento4 páginasSyllabus Math 305Nataly SusanaAinda não há avaliações
- Fix LHA Whole PagesDocumento81 páginasFix LHA Whole PagesvuonghhAinda não há avaliações
- CP AssignmentDocumento5 páginasCP AssignmentMSSM EngineeringAinda não há avaliações
- PDF RR Grade Sep ProjectsDocumento46 páginasPDF RR Grade Sep ProjectsjunqiangdongAinda não há avaliações
- Mechanical Vibration and Oscillation in Transmission LinesDocumento27 páginasMechanical Vibration and Oscillation in Transmission LinesChhatrapal SinghAinda não há avaliações
- France 10-Day ItineraryDocumento3 páginasFrance 10-Day ItineraryYou goabroadAinda não há avaliações
- Reflection Frog 1Documento3 páginasReflection Frog 1mariamAinda não há avaliações
- BCSS Sec Unit 1 Listening and Speaking SkillsDocumento16 páginasBCSS Sec Unit 1 Listening and Speaking Skillsjiny benAinda não há avaliações
- Filtomat M300Documento4 páginasFiltomat M300Sasa Jadrovski100% (1)
- Syllabus 9701 Chemistry AS: AS or A2 UnitsDocumento4 páginasSyllabus 9701 Chemistry AS: AS or A2 UnitsHubbak KhanAinda não há avaliações
- DS WhitePaper Troubleshooting 3DEXPERIENCE ABEND SituationsDocumento26 páginasDS WhitePaper Troubleshooting 3DEXPERIENCE ABEND SituationsSam AntonyAinda não há avaliações
- (Guide) Supercharger V6 For Everyone, Make Your Phone Faster - Xda-DevelopersDocumento7 páginas(Guide) Supercharger V6 For Everyone, Make Your Phone Faster - Xda-Developersmantubabu6374Ainda não há avaliações
- Phrasal Verbs en Inglés.Documento2 páginasPhrasal Verbs en Inglés.David Alexander Palomo QuirozAinda não há avaliações
- PhysioEx Exercise 1 Activity 1Documento3 páginasPhysioEx Exercise 1 Activity 1edvin merida proAinda não há avaliações
- Rated Operational Current: InstructionsDocumento12 páginasRated Operational Current: InstructionsJhon SanabriaAinda não há avaliações
- Grammar and Oral Language Development (GOLD) : Reported By: Melyn A. Bacolcol Kate Batac Julie Ann OcampoDocumento17 páginasGrammar and Oral Language Development (GOLD) : Reported By: Melyn A. Bacolcol Kate Batac Julie Ann Ocampoclara dupitasAinda não há avaliações
- Where Business Happens Where Happens: SupportDocumento19 páginasWhere Business Happens Where Happens: SupportRahul RamtekkarAinda não há avaliações
- Smarajit Ghosh - Control Systems - Theory and Applications-Pearson (2006) PDFDocumento629 páginasSmarajit Ghosh - Control Systems - Theory and Applications-Pearson (2006) PDFaggarwalakanksha100% (2)
- Omegas Prezentacija 01Documento20 páginasOmegas Prezentacija 01Predrag Djordjevic100% (1)
- Final Sent Technical Specification 14.03.2019Documento16 páginasFinal Sent Technical Specification 14.03.2019harishAinda não há avaliações
- Taewoo Kim Et Al. v. Jump TradingDocumento44 páginasTaewoo Kim Et Al. v. Jump TradingCrainsChicagoBusiness100% (1)
- Topics For Oral PresentationDocumento6 páginasTopics For Oral PresentationMohd HyqalAinda não há avaliações
- Aui2601 Exam Pack 2016 1Documento57 páginasAui2601 Exam Pack 2016 1ricara alexia moodleyAinda não há avaliações
- FixDocumento4 páginasFixReza FahmiAinda não há avaliações
- 2018 International Swimming Pool and Spa CodeDocumento104 páginas2018 International Swimming Pool and Spa CodeEngFaisal Alrai100% (3)
- 12 Layer PCB Manufacturing and Stack Up OptionsDocumento12 páginas12 Layer PCB Manufacturing and Stack Up OptionsjackAinda não há avaliações