Você também pode gostar
- Sistemas No Lineales NewmarkDocumento12 páginasSistemas No Lineales Newmarkpanda_pxd100% (1)
- Broyden FinalDocumento35 páginasBroyden FinalSilviaValdez100% (1)
- Simulación Matemática de Yacimientos TAREA 5Documento6 páginasSimulación Matemática de Yacimientos TAREA 5DianaFlomoAinda não há avaliações
- Unidad 1 - Concepto de Constante de TiempoDocumento2 páginasUnidad 1 - Concepto de Constante de TiempoBarbyModestiAinda não há avaliações
- Diseño para Reacciones HeterogéneasDocumento3 páginasDiseño para Reacciones HeterogéneasSisa GrefaAinda não há avaliações
- Funcion de TransferenciaDocumento8 páginasFuncion de TransferenciaPabloCárdenasG100% (1)
- Ejercicio 3 Lab Dinámica y VibracionesDocumento9 páginasEjercicio 3 Lab Dinámica y VibracionesBekiita Alexa SeguraAinda não há avaliações
- Taller 2 Diseño de Compensadores Basados en La Respuesta en El Tiempo Utilizando La Herramienta Sisotool PDFDocumento26 páginasTaller 2 Diseño de Compensadores Basados en La Respuesta en El Tiempo Utilizando La Herramienta Sisotool PDFJulian AlcalaAinda não há avaliações
- Primera Entre MatemáticasDocumento15 páginasPrimera Entre MatemáticasJesús Hurtado IzquierdoAinda não há avaliações
- Discretización de Sistemas en Tiempo ContinuoDocumento15 páginasDiscretización de Sistemas en Tiempo ContinuoGerardoDuranAinda não há avaliações
- Etapa 3 - Grupo - 22Documento30 páginasEtapa 3 - Grupo - 22Andrey MontoyaAinda não há avaliações
- MT227B Unidad 2a Respuesta Temporal de Sistemas Fisicos Modelados en EE 2022-1Documento61 páginasMT227B Unidad 2a Respuesta Temporal de Sistemas Fisicos Modelados en EE 2022-1Gabriel JGAinda não há avaliações
- CLASE4-CONTROLII s4Documento24 páginasCLASE4-CONTROLII s4martin caceres tupiaAinda não há avaliações
- Dinamica de Sistemas de 1 GDLDocumento16 páginasDinamica de Sistemas de 1 GDLJuan CasoAinda não há avaliações
- Tarea Simulink Modos DeslizantesDocumento2 páginasTarea Simulink Modos DeslizantesFher GV100% (1)
- Demostración Ecuación Bernoulli Cristóbal Mora ConchaDocumento7 páginasDemostración Ecuación Bernoulli Cristóbal Mora ConchaBastian AlesAinda não há avaliações
- Ejercicios Resueltos Tema 4Documento5 páginasEjercicios Resueltos Tema 4Andres Gomez GarciaAinda não há avaliações
- Sistemas Lineales de Varios Grados de Libertad 1Documento7 páginasSistemas Lineales de Varios Grados de Libertad 1JhonatanGuano100% (1)
- Tarea 1 - Omar GomezDocumento9 páginasTarea 1 - Omar GomezOmar GomezAinda não há avaliações
- Sistema Péndulo CarretillaDocumento17 páginasSistema Péndulo CarretillaJosé MartínezAinda não há avaliações
- Guía de Estudio IIIDocumento14 páginasGuía de Estudio IIIJuanAinda não há avaliações
- 2 - 3 - Diferencias Finitas - Métodos ExplicitosDocumento27 páginas2 - 3 - Diferencias Finitas - Métodos ExplicitosElton sasAinda não há avaliações
- Grupo 5 - Sensibilidad de Los Sistemas de Control A La Variación de Los ParámetrosDocumento10 páginasGrupo 5 - Sensibilidad de Los Sistemas de Control A La Variación de Los ParámetrosDiego SilvaAinda não há avaliações
- Sistemas Resorte MasaDocumento15 páginasSistemas Resorte MasaMemo CuellarAinda não há avaliações
- Solución de Sistema de Ecuaciones No LinealesDocumento3 páginasSolución de Sistema de Ecuaciones No LinealesJOSE ADRIAN MONTENEGRO QUESADAAinda não há avaliações
- S3 - Funcion-De Transferencia Pulso - Lazo Abierto-CerradoDocumento34 páginasS3 - Funcion-De Transferencia Pulso - Lazo Abierto-CerradoSebastian Sotelo100% (1)
- 0.1.transformada y Antitransformada de FourierDocumento26 páginas0.1.transformada y Antitransformada de FourierDaniel GuerreroAinda não há avaliações
- Resultado de Aprendizaje Unidad 2 MatematicasDocumento8 páginasResultado de Aprendizaje Unidad 2 Matematicasmario alberto vasquez ramirezAinda não há avaliações
- LaplaceDocumento15 páginasLaplaceJesús Hurtado IzquierdoAinda não há avaliações
- Presentación U3Documento17 páginasPresentación U3Gustavo TellezAinda não há avaliações
- Ec. de Primer Grado Primer Orden-1-1Documento8 páginasEc. de Primer Grado Primer Orden-1-1Jhon Kevin Canaviri MamaniAinda não há avaliações
- Tutoria15722961 PDFDocumento19 páginasTutoria15722961 PDFCarla Garcia EsquivaAinda não há avaliações
- Vibracion Forzada GeneralDocumento24 páginasVibracion Forzada GeneralMiguel Angel Rodriguez ValverdeAinda não há avaliações
- Laboratorio3 1LX 231Documento21 páginasLaboratorio3 1LX 231jorgeAinda não há avaliações
- Trabajo Completo Control Primera FaseDocumento66 páginasTrabajo Completo Control Primera FaseJuniior Cabrera BolivarAinda não há avaliações
- Determinación de Los Parámetros de La Función de TransferenciaDocumento5 páginasDeterminación de Los Parámetros de La Función de TransferenciaSheila Bernedo100% (1)
- Actividad de ReconocimientoDocumento18 páginasActividad de ReconocimientoGuido Gonzalez PosadaAinda não há avaliações
- DIseño de Controladores Discreto Utilizando El Metodo de FrecuenciaDocumento16 páginasDIseño de Controladores Discreto Utilizando El Metodo de FrecuenciaAdrián AntonioAinda não há avaliações
- Tema 3 Análisis de Respuesta en El TiempoDocumento27 páginasTema 3 Análisis de Respuesta en El TiempoMiguelAinda não há avaliações
- Redes de AdelantoDocumento10 páginasRedes de AdelantoSebastián Arica VidalAinda não há avaliações
- Unidad 1 Tarea 3 ALGEBRA Y TRIGONIMETRIA UNADDocumento8 páginasUnidad 1 Tarea 3 ALGEBRA Y TRIGONIMETRIA UNADbernardoAinda não há avaliações
- Boletín 6 Soluciones v6Documento21 páginasBoletín 6 Soluciones v6fragullaAinda não há avaliações
- 1 Parcial-Apuntes DFGDocumento17 páginas1 Parcial-Apuntes DFGMiszael FloressAinda não há avaliações
- Portafolio Brance Torres Control IIDocumento17 páginasPortafolio Brance Torres Control IIPablo RamirezAinda não há avaliações
- Tarea 2 Sistemas DinámicosDocumento9 páginasTarea 2 Sistemas DinámicosEdgar Duque100% (1)
- Tarea2 Grupo 116Documento37 páginasTarea2 Grupo 116Brayan Andres Devia HerreraAinda não há avaliações
- Guia Laboratorio 1 - CO 2023 IIDocumento4 páginasGuia Laboratorio 1 - CO 2023 IIDavid PacherrezAinda não há avaliações
- La Guía Definitiva en Matemáticas para el Ingreso a la UniversidadNo EverandLa Guía Definitiva en Matemáticas para el Ingreso a la UniversidadNota: 4 de 5 estrelas4/5 (11)
- Informe Semanal N°1Documento12 páginasInforme Semanal N°1Carlos Alberto Leyva GiraldoAinda não há avaliações
- % Edif.1 - Tijerales y CorreasDocumento4 páginas% Edif.1 - Tijerales y CorreasCarlos Alberto Leyva GiraldoAinda não há avaliações
- Informe Semanal N°2Documento13 páginasInforme Semanal N°2Carlos Alberto Leyva GiraldoAinda não há avaliações
- Sismo Dinamico Vs EstaticoDocumento2 páginasSismo Dinamico Vs EstaticoCarlos Alberto Leyva GiraldoAinda não há avaliações
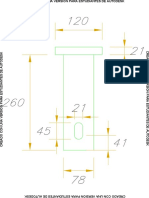
- Pin de Gancho de PelicanoDocumento1 páginaPin de Gancho de PelicanoCarlos Alberto Leyva GiraldoAinda não há avaliações
- Panel Fotografico 4Documento12 páginasPanel Fotografico 4Carlos Alberto Leyva GiraldoAinda não há avaliações
- Informe Semanal N°1 Boya A-2Documento10 páginasInforme Semanal N°1 Boya A-2Carlos Alberto Leyva GiraldoAinda não há avaliações
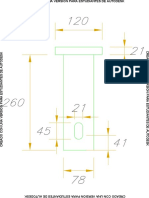
- Pin de Gancho de PelicanoDocumento1 páginaPin de Gancho de PelicanoCarlos Alberto Leyva GiraldoAinda não há avaliações
- Materiales Emepar ModulosDocumento3 páginasMateriales Emepar ModulosCarlos Alberto Leyva GiraldoAinda não há avaliações
- Viga de Cielo RasoDocumento5 páginasViga de Cielo RasoCarlos Alberto Leyva GiraldoAinda não há avaliações
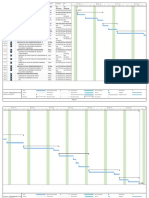
- Cronograma de MontajeDocumento2 páginasCronograma de MontajeCarlos Alberto Leyva GiraldoAinda não há avaliações
- Acta de Entrega Fisica de Los Trabajo de Pintura de La Boya A4Documento2 páginasActa de Entrega Fisica de Los Trabajo de Pintura de La Boya A4Carlos Alberto Leyva Giraldo100% (1)
- Metrado Edificio Obrero UltimoDocumento20 páginasMetrado Edificio Obrero UltimoCarlos Alberto Leyva GiraldoAinda não há avaliações
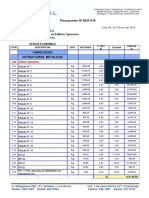
- Presupuesto #0028-018 PROMET - EDIFICIO OPERARIODocumento2 páginasPresupuesto #0028-018 PROMET - EDIFICIO OPERARIOCarlos Alberto Leyva GiraldoAinda não há avaliações
- VAL.2 - Nexos Cerco Perimetrico Chuspiri OC 0407827 - 2021Documento3 páginasVAL.2 - Nexos Cerco Perimetrico Chuspiri OC 0407827 - 2021Carlos Alberto Leyva GiraldoAinda não há avaliações
- 05.protocolo Tintes Penetrantes ESCalera 3Documento5 páginas05.protocolo Tintes Penetrantes ESCalera 3Carlos Alberto Leyva Giraldo100% (4)
- T3 PROYECTO CONSTRUCCION DE CONDOMINIO... OkDocumento38 páginasT3 PROYECTO CONSTRUCCION DE CONDOMINIO... OkCarlos Alberto Leyva GiraldoAinda não há avaliações
- Cuenca Del Rio Ramis T 2Documento27 páginasCuenca Del Rio Ramis T 2Carlos Alberto Leyva GiraldoAinda não há avaliações
- t3 Proyecto Construccion de Condominio... OkDocumento38 páginast3 Proyecto Construccion de Condominio... OkCarlos Alberto Leyva GiraldoAinda não há avaliações
- T3 PAPER Impacto Ambiental ColiseoDocumento40 páginasT3 PAPER Impacto Ambiental ColiseoCarlos Alberto Leyva GiraldoAinda não há avaliações
- Dialux Con Philips Sodio 150 W PotenciaDocumento13 páginasDialux Con Philips Sodio 150 W PotenciaLuis ObandoAinda não há avaliações
- Consultar Situación Tributaria de TercerosDocumento1 páginaConsultar Situación Tributaria de TercerosSinJefes.orgAinda não há avaliações
- Semana 1 El Emprendedor TecnologicoDocumento13 páginasSemana 1 El Emprendedor TecnologicoJulio Antonio Montes ValdesAinda não há avaliações
- Lista de ProgramasDocumento5 páginasLista de ProgramasrobyAinda não há avaliações
- Linealización de Una Termocupla Tipo KDocumento5 páginasLinealización de Una Termocupla Tipo KMauro AntiveroAinda não há avaliações
- Examen Final Upuc 2019 Ii Practico PDFDocumento2 páginasExamen Final Upuc 2019 Ii Practico PDFPol Ardiles Morales0% (2)
- Gestión de Usuarios y AutorizacionesDocumento5 páginasGestión de Usuarios y AutorizacionesASIAAinda não há avaliações
- Examen Semana 4 Gestion de InventarioDocumento6 páginasExamen Semana 4 Gestion de Inventariomadeleine030759980% (1)
- Palabras ReservadasDocumento2 páginasPalabras Reservadasinfo501Ainda não há avaliações
- EPSON PowerLite® S39Documento4 páginasEPSON PowerLite® S39Support Technician Indra Colombia LtdaAinda não há avaliações
- Propuesta Comercial Software SivicjDocumento4 páginasPropuesta Comercial Software SivicjJuan CortesAinda não há avaliações
- Programación Dinámica DeterministaDocumento19 páginasProgramación Dinámica DeterministaJean Paul PereaAinda não há avaliações
- Los ConectoresDocumento3 páginasLos ConectoresManuel Exnaydeer Garro CastilloAinda não há avaliações
- Mercado de EnergiaDocumento5 páginasMercado de Energiaestebandavid2300Ainda não há avaliações
- Lab2 v0Documento16 páginasLab2 v0PIERO MICHAEL ZAMORA ROJASAinda não há avaliações
- Evaluación U3Documento8 páginasEvaluación U3LOBO SOLITARIO NOMADAAinda não há avaliações
- Procesamiento Del Lenguaje NaturalDocumento6 páginasProcesamiento Del Lenguaje NaturalCesar Paul Vara Toratto100% (8)
- Metáfora Del SistemaDocumento5 páginasMetáfora Del SistemaCesar EscalanteAinda não há avaliações
- NotDocumento195 páginasNotedgar507Ainda não há avaliações
- BitacoraDocumento1 páginaBitacoradjmmAinda não há avaliações
- Tutorial de PowerPointDocumento15 páginasTutorial de PowerPointdefcondos100% (6)
- Abe 2023Documento4 páginasAbe 2023EDGARD WILSON BUSTILLOS ADRIANZENAinda não há avaliações
- Programador PablinDocumento7 páginasProgramador PablinFrancisco Javier Vidal Arciniegas100% (1)
- GjgyvDocumento1 páginaGjgyvRicardo Antonio Talledo VallejoAinda não há avaliações
- Manual Usuario Os TicketDocumento14 páginasManual Usuario Os TicketEnnery Alberto Leon FuenmayorAinda não há avaliações
- Lab RegresionDocumento27 páginasLab RegresionWaly PeñaAinda não há avaliações
- Clase #01 - La Comunicación. Fernando Ponce ArroyoDocumento23 páginasClase #01 - La Comunicación. Fernando Ponce Arroyofernandoponcearroyo4990Ainda não há avaliações
- 1.1. Ecuaciones de BoussinesqDocumento4 páginas1.1. Ecuaciones de Boussinesqfredy martinez diaz100% (1)
- Manual EBP ProveedoresDocumento34 páginasManual EBP ProveedoresWalter LlenqueAinda não há avaliações