Você também pode gostar
- Power Control AGC1Documento35 páginasPower Control AGC1surya892100% (1)
- 12 Induction Machine AnalysisDocumento8 páginas12 Induction Machine AnalysisnaserhashemniaAinda não há avaliações
- 14eit72 Isd Unit Iii PDFDocumento49 páginas14eit72 Isd Unit Iii PDFksjanarthanan_sriAinda não há avaliações
- 5 Controlled Rectifier DC Drives-Closed Loop - PpsDocumento41 páginas5 Controlled Rectifier DC Drives-Closed Loop - PpsRanjan KumarAinda não há avaliações
- Erth SwitchDocumento20 páginasErth SwitchPutraKurniawanAinda não há avaliações
- Elektropneumatik MainDocumento18 páginasElektropneumatik MainIhsan MuhammadAinda não há avaliações
- Proportional-Integral-Derivative (PID) Control: Velocity ResponseDocumento34 páginasProportional-Integral-Derivative (PID) Control: Velocity ResponseFadi AlbatshAinda não há avaliações
- Automatic Traffic Signal ControllerDocumento32 páginasAutomatic Traffic Signal Controllerrakeshcusat89100% (1)
- U240E DiagnosticsDocumento5 páginasU240E DiagnosticsAngel Corro LemmAinda não há avaliações
- CH 4 5 Sequinital NewDocumento65 páginasCH 4 5 Sequinital NewjoAinda não há avaliações
- Experiment No.: - 1: To Study The DC Servomotor CharacteristicsDocumento50 páginasExperiment No.: - 1: To Study The DC Servomotor CharacteristicsNobita NobiAinda não há avaliações
- GR00002400 54BcDocumento146 páginasGR00002400 54BcArt Del R Salonga100% (1)
- Chapter5-Reduction of SystemsDocumento33 páginasChapter5-Reduction of Systemsعمر الفهدAinda não há avaliações
- Exp 1Documento33 páginasExp 1k4nishkkAinda não há avaliações
- What Are The Different Types of Sequential CircuitsDocumento10 páginasWhat Are The Different Types of Sequential Circuitsalvin castroAinda não há avaliações
- Performance Analysis of A Single-Phase Ac Voltage Controller Under Induction Motor LoadDocumento8 páginasPerformance Analysis of A Single-Phase Ac Voltage Controller Under Induction Motor LoadInternational Journal of Research in Engineering and TechnologyAinda não há avaliações
- P0748Documento3 páginasP0748kreyhonAinda não há avaliações
- Practice Report 8: Silicon Controlled RectifierDocumento5 páginasPractice Report 8: Silicon Controlled RectifierTecnicoItcaAinda não há avaliações
- Unit 02Documento85 páginasUnit 02MD SHAHRIARMAHMUDAinda não há avaliações
- Mechatronics Project: Linear Displacement IndicatorDocumento6 páginasMechatronics Project: Linear Displacement IndicatorNahugirsh ZozAinda não há avaliações
- Paper2 Sliding SRMDocumento5 páginasPaper2 Sliding SRMjeba_evaAinda não há avaliações
- Slva 589Documento12 páginasSlva 589Omar MohamedAinda não há avaliações
- Rotor Angle Stability (1) Rotor Angle StabilityDocumento17 páginasRotor Angle Stability (1) Rotor Angle Stabilityrasim_m1146Ainda não há avaliações
- Marwan K. Abbadi Advisor: Dr. Winfred AnakwaDocumento35 páginasMarwan K. Abbadi Advisor: Dr. Winfred AnakwaAniruddha NarkhedeAinda não há avaliações
- Woodward Prop Synch ManualDocumento59 páginasWoodward Prop Synch ManualRichard FloydAinda não há avaliações
- Mechatronics CEP 2 Designing Control System For Suspension SystemDocumento12 páginasMechatronics CEP 2 Designing Control System For Suspension SystemFaizan SamdaniAinda não há avaliações
- DCM SessoinDocumento63 páginasDCM SessoinLakshmiAinda não há avaliações
- SYSTEM DYNAMICS LAB GUIDEDocumento22 páginasSYSTEM DYNAMICS LAB GUIDEAnton FerreAinda não há avaliações
- Power System OtherDocumento63 páginasPower System OtherizamaiyusAinda não há avaliações
- Project Title: Distribution Transmission Line Voltage Monitoring and Alert SystemDocumento34 páginasProject Title: Distribution Transmission Line Voltage Monitoring and Alert SystemyashAinda não há avaliações
- Digital / Analog Trainer: ElencoDocumento16 páginasDigital / Analog Trainer: ElencoRichard AraujoAinda não há avaliações
- Control Systems IDocumento340 páginasControl Systems ICarraan Dandeettirra Caala AltakkatakkaAinda não há avaliações
- ECP MagLev Model 730Documento2 páginasECP MagLev Model 730Jose AlejandroAinda não há avaliações
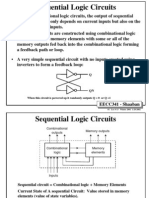
- Sequential Logic CircuitsDocumento15 páginasSequential Logic Circuitsmps125Ainda não há avaliações
- Chapter - 5 - The Performance of Feedback Control Systems - W2015Documento91 páginasChapter - 5 - The Performance of Feedback Control Systems - W2015120200421003nAinda não há avaliações
- Pres06 MNG512 (111--112) Control ActionsDocumento37 páginasPres06 MNG512 (111--112) Control ActionsMahmudul HasanAinda não há avaliações
- Experiment 1 SCRDocumento23 páginasExperiment 1 SCREmry MenezAinda não há avaliações
- ControllersDocumento16 páginasControllersMONIRAJ MONDALAinda não há avaliações
- KD6031 2023 Output Transducers Section 8 (Wk11)Documento34 páginasKD6031 2023 Output Transducers Section 8 (Wk11)mohamed redaAinda não há avaliações
- L00 Intro To CSEDocumento51 páginasL00 Intro To CSEYohan ManaligodAinda não há avaliações
- rohini_27072873676Documento7 páginasrohini_27072873676VIKASH YADAVAinda não há avaliações
- Circuitos Electroneumaticos nrc2496Documento29 páginasCircuitos Electroneumaticos nrc2496Ronnie LoboAinda não há avaliações
- A Control Method For SVPWM-based STATCOMDocumento6 páginasA Control Method For SVPWM-based STATCOMJothsna PraveenaAinda não há avaliações
- Computer ClockDocumento13 páginasComputer ClockGlan DevadhasAinda não há avaliações
- (Journal of Electrical Engineering) A New High Speed Induction Motor Drive Based On Field Orientation and Hysteresis Current ComparisonDocumento9 páginas(Journal of Electrical Engineering) A New High Speed Induction Motor Drive Based On Field Orientation and Hysteresis Current ComparisonAugusto ThedoctorAinda não há avaliações
- MatLAB SimPowerSystems for Modelling and SimulationDocumento10 páginasMatLAB SimPowerSystems for Modelling and SimulationSemih Cem İlikAinda não há avaliações
- Manual de Servicio Montacargas MitsubishI Modelo ESR23N2 36 4Documento25 páginasManual de Servicio Montacargas MitsubishI Modelo ESR23N2 36 4Ulises Raul JimenezAinda não há avaliações
- Lab Report CS 11Documento4 páginasLab Report CS 11ubaidAinda não há avaliações
- Chapter 3.0 - Block DiagramDocumento37 páginasChapter 3.0 - Block DiagramAzyan Wafiqah AzmiAinda não há avaliações
- Control of A Double Inverted Pendulum On ADocumento12 páginasControl of A Double Inverted Pendulum On AJoseph CassarAinda não há avaliações
- Fuzzy Logic vs. Classical PI Vol PDFDocumento6 páginasFuzzy Logic vs. Classical PI Vol PDFLeroy Lionel SonfackAinda não há avaliações
- Simulation and analysis of an AVR system using MATLABDocumento5 páginasSimulation and analysis of an AVR system using MATLAButtamAinda não há avaliações
- EE305Documento24 páginasEE305api-3853441Ainda não há avaliações
- 2 MarksDocumento29 páginas2 MarksprassathAinda não há avaliações
- Electrical Correcting Elements in Automatic Control and Regulation CircuitsNo EverandElectrical Correcting Elements in Automatic Control and Regulation CircuitsAinda não há avaliações
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1No EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1Nota: 2.5 de 5 estrelas2.5/5 (3)
- PNEUMATICS AND AIR CIRCUITS UNDERSTANDING THE CASCADE VALVE AND PLC UNDERSTANDINGNo EverandPNEUMATICS AND AIR CIRCUITS UNDERSTANDING THE CASCADE VALVE AND PLC UNDERSTANDINGAinda não há avaliações
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2No EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2Ainda não há avaliações
- Chapter 4: Signal Flow GraphsDocumento3 páginasChapter 4: Signal Flow GraphsMuhammed IfkazAinda não há avaliações
- 5-S MATRIX PROPERTIES PROOF SIGNAL FLOW GRAPH-17-Jul-2019Material - I - 17-Jul-2019 - Lect3-S - Matrix - Proof - Numerical - ProblemDocumento87 páginas5-S MATRIX PROPERTIES PROOF SIGNAL FLOW GRAPH-17-Jul-2019Material - I - 17-Jul-2019 - Lect3-S - Matrix - Proof - Numerical - Problemabhignan routhuAinda não há avaliações
- AutomaticControlforMechanicalEngineersByM GalalRabieoptDocumento176 páginasAutomaticControlforMechanicalEngineersByM GalalRabieoptHectorVasquezLaraAinda não há avaliações
- Control Sys.2Documento102 páginasControl Sys.2Salman TariqAinda não há avaliações
- Mathematical Models of Control Systems ExplainedDocumento36 páginasMathematical Models of Control Systems ExplainedThomasVictor100% (1)
- Control System Analysis and DesignDocumento2 páginasControl System Analysis and DesignJunnel NegadAinda não há avaliações
- Chapter 3Documento61 páginasChapter 3محمد فائزAinda não há avaliações
- Cas RF Engineering Basic ConceptsDocumento49 páginasCas RF Engineering Basic Conceptsraghu438Ainda não há avaliações
- Automatic Control For Mechanical Engineers, M Galal RabieDocumento176 páginasAutomatic Control For Mechanical Engineers, M Galal RabieGalal RabieAinda não há avaliações
- Lecture 13 Signal Flow Graphs and Mason, S RuleDocumento27 páginasLecture 13 Signal Flow Graphs and Mason, S RuleHamza KhanAinda não há avaliações
- Control Systems Resit Exam QuestionsDocumento3 páginasControl Systems Resit Exam QuestionsDimitrios A. KarrasAinda não há avaliações
- Control Engineering Course PlanDocumento30 páginasControl Engineering Course PlanSharanabasappa SajjanAinda não há avaliações
- EC402 - Control SystemDocumento4 páginasEC402 - Control SystemDharmveer ModiAinda não há avaliações
- CS MCQSDocumento73 páginasCS MCQSFarhan SafdarAinda não há avaliações
- Control System Engineering: Prof. Amitkumar B. Panchal, Assistant ProfessorDocumento100 páginasControl System Engineering: Prof. Amitkumar B. Panchal, Assistant ProfessorSudhanshu SinghAinda não há avaliações
- Feedback and Control System in MATLAB GUIDocumento38 páginasFeedback and Control System in MATLAB GUIBenj MendozaAinda não há avaliações
- LCS Lab 5Documento3 páginasLCS Lab 5SaRosh RaeesAinda não há avaliações
- Signal Flow Graph - GATE Study Material in PDFDocumento5 páginasSignal Flow Graph - GATE Study Material in PDFAtul ChoudharyAinda não há avaliações
- Signal Flow Graph Analysis of Electrical CircuitsDocumento55 páginasSignal Flow Graph Analysis of Electrical CircuitsSDasdaDsadsaAinda não há avaliações
- Ec6405 - Control System Engineering Questions and Answers Unit - I Control System Modeling Two MarksDocumento53 páginasEc6405 - Control System Engineering Questions and Answers Unit - I Control System Modeling Two MarksSaravanan Pazapughal100% (1)
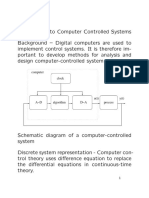
- W 4 Automotive Control Systems PDFDocumento20 páginasW 4 Automotive Control Systems PDFprime SEOAinda não há avaliações
- EC6405 CS Question Bank FULLDocumento84 páginasEC6405 CS Question Bank FULLreporterrajiniAinda não há avaliações
- Program: Automated Vehicle Control SystemsDocumento12 páginasProgram: Automated Vehicle Control SystemsKalakriti IITIAinda não há avaliações
- Summary of Topic Covered in ECE408Documento89 páginasSummary of Topic Covered in ECE408Nishikata ManipolAinda não há avaliações
- Control Systems Theory: Introduction To Block DiagramDocumento47 páginasControl Systems Theory: Introduction To Block DiagramFadly ShafiqAinda não há avaliações
- Automatic Control Systems B C KUODocumento671 páginasAutomatic Control Systems B C KUOshahnawaz khanAinda não há avaliações
- Vehicular Electric Power Systems - Ali EmadiDocumento503 páginasVehicular Electric Power Systems - Ali EmadiRebaz Jamal Ahmed100% (1)
- EC2255-Solved Problems in Control Systems PDFDocumento182 páginasEC2255-Solved Problems in Control Systems PDFmaheshbabu527100% (2)
- Block Diagram ReductionDocumento5 páginasBlock Diagram Reductionİsmail KayahanAinda não há avaliações
- Modelling Electromechanical Systems (Ch. 3)Documento27 páginasModelling Electromechanical Systems (Ch. 3)Irtiza IshrakAinda não há avaliações