Você também pode gostar
- Qaisra Shahraz - A Pair of JeansDocumento3 páginasQaisra Shahraz - A Pair of Jeansmonkey3333389% (19)
- Drift Diffusion ModelingDocumento84 páginasDrift Diffusion ModelingMrDOTAinda não há avaliações
- AP621 Lect02 DiffractionDocumento117 páginasAP621 Lect02 DiffractionHassanAinda não há avaliações
- Seismic Velocity, Attenuation (Q), and AnisotropyDocumento22 páginasSeismic Velocity, Attenuation (Q), and Anisotropyintang pingkiAinda não há avaliações
- Capstone Project MarketingDocumento9 páginasCapstone Project MarketingKawalpreet SinghAinda não há avaliações
- Post Purchase Cognitive DissonanceDocumento18 páginasPost Purchase Cognitive DissonancePawan DihiyeAinda não há avaliações
- Finite DifferenceDocumento27 páginasFinite DifferencePhung NguyenAinda não há avaliações
- Finite Element Method: Mechanical Engineering DepartmentDocumento27 páginasFinite Element Method: Mechanical Engineering DepartmentmAinda não há avaliações
- BCM Notes Unit No. IIDocumento14 páginasBCM Notes Unit No. IIMahesh RamtekeAinda não há avaliações
- Future Tower Iii, Sharjah: Operation & Maintenance Manual Building Maintenance UnitDocumento107 páginasFuture Tower Iii, Sharjah: Operation & Maintenance Manual Building Maintenance UnitFrancis BautistaAinda não há avaliações
- Lecture 3 Numerical MethodsDocumento61 páginasLecture 3 Numerical MethodsLeandro Di BartoloAinda não há avaliações
- MSEG 667: 3: Guided Wave OpticsDocumento26 páginasMSEG 667: 3: Guided Wave OpticsJuan Carlos GarayAinda não há avaliações
- 02 Finite DifferencesDocumento27 páginas02 Finite DifferencesCham AmirruddinAinda não há avaliações
- CFD TheoryDocumento46 páginasCFD Theoryok rightAinda não há avaliações
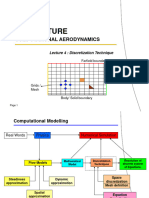
- Lecture4 Discretization TechniqueDocumento25 páginasLecture4 Discretization TechniqueTin DangAinda não há avaliações
- 05 Nonlinear Dynamics PDFDocumento39 páginas05 Nonlinear Dynamics PDFZ R BhattiAinda não há avaliações
- Dirac Fermions and Domain Wall Defects in 2 + 1 Dimensions: C.D. Fosco and A. L OpezDocumento24 páginasDirac Fermions and Domain Wall Defects in 2 + 1 Dimensions: C.D. Fosco and A. L OpezJoão Sérgio PereiraAinda não há avaliações
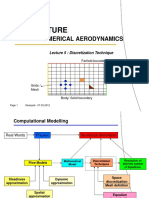
- AE 4012 Aerodinamika Numerik-Lecture5 Discretization TechniqueDocumento28 páginasAE 4012 Aerodinamika Numerik-Lecture5 Discretization TechniqueDaniel TanAinda não há avaliações
- Anomalies in Quantum Field Theory: Marco SeroneDocumento48 páginasAnomalies in Quantum Field Theory: Marco SeronetrevorscheopnerAinda não há avaliações
- Compute Methods@CornellDocumento71 páginasCompute Methods@CornellFelipe LucenaAinda não há avaliações
- Advanced Method For Analysis of Flow in PDFDocumento6 páginasAdvanced Method For Analysis of Flow in PDFBill M. SpragueAinda não há avaliações
- Das 2018Documento17 páginasDas 2018joginder singhAinda não há avaliações
- Andreev ReflectionDocumento20 páginasAndreev ReflectionEakkarat PattAinda não há avaliações
- Wave Propagation Fundamentals - 1 Propagation of Plane and Spherical WavesDocumento19 páginasWave Propagation Fundamentals - 1 Propagation of Plane and Spherical WavesRony YudaAinda não há avaliações
- Soils - Deformation CalculationDocumento28 páginasSoils - Deformation Calculationthomas yapiAinda não há avaliações
- Numerical Methods For Pdes: Spring 2007Documento35 páginasNumerical Methods For Pdes: Spring 2007MartinI.IseckAinda não há avaliações
- SzmidtDocumento19 páginasSzmidtHamza Hamza HamzaAinda não há avaliações
- X-Ray DiffractionDocumento15 páginasX-Ray Diffraction구서경Ainda não há avaliações
- Ix SB 04 Tabakov A PaperDocumento8 páginasIx SB 04 Tabakov A Paperedgar chacinAinda não há avaliações
- Finite Difference Modelling of The Full Acoustic Wave Equation in Matlab (REFERENCES)Documento9 páginasFinite Difference Modelling of The Full Acoustic Wave Equation in Matlab (REFERENCES)Mikael Yuan EstuariwinarnoAinda não há avaliações
- 2023-04 MatherialsDocumento30 páginas2023-04 MatherialsBày RémAinda não há avaliações
- Quantum Mechanics, Advanced Course Scattering Theory: - Understanding of MatterDocumento50 páginasQuantum Mechanics, Advanced Course Scattering Theory: - Understanding of Matter7747252Ainda não há avaliações
- Comparative Study On Added Comparative Study On Added Resistance Computation Resistance ComputationDocumento24 páginasComparative Study On Added Comparative Study On Added Resistance Computation Resistance ComputationSahil JawaAinda não há avaliações
- Lezione02 PDFDocumento27 páginasLezione02 PDFhurricane246Ainda não há avaliações
- Lesson 01 IntroductionDocumento10 páginasLesson 01 Introduction一二三Ainda não há avaliações
- 2 - Wave Diffraction and Reciprocal LatticeDocumento36 páginas2 - Wave Diffraction and Reciprocal Latticee24106181Ainda não há avaliações
- Computing Project: Numerical Solver For The 2D-Channel-Flow in Vorticity-Streamfunction FormulationDocumento18 páginasComputing Project: Numerical Solver For The 2D-Channel-Flow in Vorticity-Streamfunction FormulationHappy SinghAinda não há avaliações
- Mathematics of Seismic Imaging: William W. SymesDocumento54 páginasMathematics of Seismic Imaging: William W. SymesRahmat HidayatAinda não há avaliações
- Infrastructure Rehabilitation and MonitoringDocumento55 páginasInfrastructure Rehabilitation and MonitoringAkhil JaganiAinda não há avaliações
- Magnetotransport in NanostructuresDocumento33 páginasMagnetotransport in NanostructuresMaterials Research InstituteAinda não há avaliações
- (2021) Understand Slope Limiter GraphicallyDocumento13 páginas(2021) Understand Slope Limiter GraphicallyWangJuliusAinda não há avaliações
- Bstract: g j j≥0 2 λ j≥0 g λ j λDocumento24 páginasBstract: g j j≥0 2 λ j≥0 g λ j λdata compressionAinda não há avaliações
- Metode Beda HinggaDocumento44 páginasMetode Beda HinggaYadi Elsa NDAinda não há avaliações
- Stein Variational Gradient Descent: Many-Particle and Long-Time AsymptoticsDocumento25 páginasStein Variational Gradient Descent: Many-Particle and Long-Time AsymptoticsAlex LeviyevAinda não há avaliações
- Radar KT Lect2Documento24 páginasRadar KT Lect2ojasvi kathuriaAinda não há avaliações
- Optics For Engineers: Charles A. Dimarzio Northeastern UniversityDocumento38 páginasOptics For Engineers: Charles A. Dimarzio Northeastern Universitybitconcepts9781Ainda não há avaliações
- Optics-02-03-Light Properties - EM TheoryDocumento57 páginasOptics-02-03-Light Properties - EM TheoryAshishAinda não há avaliações
- 57d9 PDFDocumento18 páginas57d9 PDFStajic MilanAinda não há avaliações
- 2007 05790Documento31 páginas2007 05790Eugenio Guerrero RuizAinda não há avaliações
- SAXS TutorialDocumento107 páginasSAXS TutorialpatimontesrubioAinda não há avaliações
- Impact Fracture of Rock Materials Due To Percussive Drilling ActionDocumento2 páginasImpact Fracture of Rock Materials Due To Percussive Drilling Actioncvlpla55Ainda não há avaliações
- Lecture 8 Wave Optics (EM Waves) - VDocumento24 páginasLecture 8 Wave Optics (EM Waves) - VnurulAinda não há avaliações
- Fundamentals of Photonics: Bahaa E. A. Saleh, Malvin Carl TeichDocumento31 páginasFundamentals of Photonics: Bahaa E. A. Saleh, Malvin Carl TeichImaneAinda não há avaliações
- ME2135 Week 11 SlidesDocumento48 páginasME2135 Week 11 Slideshuykhang.tranpAinda não há avaliações
- Unit 1 Summary SlidesDocumento17 páginasUnit 1 Summary SlidesayuuuAinda não há avaliações
- Class Gen Chem-Lect 4-23-08-23Documento27 páginasClass Gen Chem-Lect 4-23-08-23PAARTH GOELAAinda não há avaliações
- Lectures List T-A: Office Hours: Anytime by AppointmentDocumento28 páginasLectures List T-A: Office Hours: Anytime by AppointmentggsddfAinda não há avaliações
- MIT2 29F11 Lect 12Documento27 páginasMIT2 29F11 Lect 12Vesa RäisänenAinda não há avaliações
- Chem 524 Lecture Notes (Sect. 7) : IV. Wavelength Discriminators (Continued)Documento18 páginasChem 524 Lecture Notes (Sect. 7) : IV. Wavelength Discriminators (Continued)Anurak OnnnoomAinda não há avaliações
- Pulido Diaz VIDocumento4 páginasPulido Diaz VIglasumeAinda não há avaliações
- Nonlinear Standingwaves in Acoustic ResonatorsDocumento4 páginasNonlinear Standingwaves in Acoustic ResonatorsJmeno PrijmeniAinda não há avaliações
- Chapter Ten Introduction To Computational Fluid DynamicsDocumento28 páginasChapter Ten Introduction To Computational Fluid DynamicsMisge ChekoleAinda não há avaliações
- Finite Element Method: Mechanical Engineering DepartmentDocumento27 páginasFinite Element Method: Mechanical Engineering DepartmentmAinda não há avaliações
- Scattering State and Bound State of Scalar Field in Schwarzschild Spacetime - Exact SolutionDocumento24 páginasScattering State and Bound State of Scalar Field in Schwarzschild Spacetime - Exact SolutionAhitagniAinda não há avaliações
- Green's Function Estimates for Lattice Schrödinger Operators and Applications. (AM-158)No EverandGreen's Function Estimates for Lattice Schrödinger Operators and Applications. (AM-158)Ainda não há avaliações
- GnuplotDocumento18 páginasGnuplotNilasha GhoshAinda não há avaliações
- Se 8 857 2017 PDFDocumento26 páginasSe 8 857 2017 PDFanupamAinda não há avaliações
- Finite Difference and Interpolation PDFDocumento29 páginasFinite Difference and Interpolation PDFanupamAinda não há avaliações
- E Arthquake T Riggering by S Tatic, D Ynamic, and P Ostseismic S Tress T RansferDocumento39 páginasE Arthquake T Riggering by S Tatic, D Ynamic, and P Ostseismic S Tress T RansferanupamAinda não há avaliações
- Evidence From The AD 2000 Izu Islands Earthquake Swarm That Stressing Rate Governs SeismicityDocumento4 páginasEvidence From The AD 2000 Izu Islands Earthquake Swarm That Stressing Rate Governs SeismicityanupamAinda não há avaliações
- GMT Docs PDFDocumento318 páginasGMT Docs PDFanupamAinda não há avaliações
- Static Stress Transfer and Earthquake TriggeringDocumento12 páginasStatic Stress Transfer and Earthquake TriggeringanupamAinda não há avaliações
- AwanishTrivedi PastryChefDocumento3 páginasAwanishTrivedi PastryChefChandra MohanAinda não há avaliações
- US Tax Preparation Course - Orientation - 01 SepDocumento18 páginasUS Tax Preparation Course - Orientation - 01 Sepadnan.riaz81155Ainda não há avaliações
- 6 5 Nerves Hormones and HomeostasisDocumento19 páginas6 5 Nerves Hormones and Homeostasisapi-235355872Ainda não há avaliações
- Safety EducationDocumento5 páginasSafety EducationOwen Silva NaldozaAinda não há avaliações
- Test Report: LaboratoryDocumento5 páginasTest Report: LaboratorybethAinda não há avaliações
- Business Plan PDFDocumento86 páginasBusiness Plan PDFNicholas SalisAinda não há avaliações
- First ContingencyDocumento2 páginasFirst Contingencymanju bhargavAinda não há avaliações
- The Sparrow: Srijani Bhowmick Class VDocumento12 páginasThe Sparrow: Srijani Bhowmick Class VsgphycoAinda não há avaliações
- WordDocumento48 páginasWordenkelene.zulfajAinda não há avaliações
- UNITRONICS V200-18-E1Documento10 páginasUNITRONICS V200-18-E1eddieipenzaAinda não há avaliações
- RET541 543ParlistENaDocumento145 páginasRET541 543ParlistENaMatthew Mason100% (1)
- IvtDocumento32 páginasIvtArlhona Juana RagoAinda não há avaliações
- Il Ruolo Delle Esperienze Religiose Nella Cultura Della LegalitàDocumento42 páginasIl Ruolo Delle Esperienze Religiose Nella Cultura Della LegalitàMarisa La BarberaAinda não há avaliações
- 01-CPD-8, Civil Aviation Procedure Document On Airworthiness-MinDocumento884 páginas01-CPD-8, Civil Aviation Procedure Document On Airworthiness-Minnishat529100% (1)
- STS Reviewer 1Documento9 páginasSTS Reviewer 1Kyle SeseAinda não há avaliações
- Iron Ore Value-In-Use: Benchmarking and Application: Peter Hannah AnalystDocumento19 páginasIron Ore Value-In-Use: Benchmarking and Application: Peter Hannah AnalystAnkit BansalAinda não há avaliações
- RFEupdatingTrack BasicTutorial 2.4Documento9 páginasRFEupdatingTrack BasicTutorial 2.4TurugayuAinda não há avaliações
- Unit 2 Computer Hardware and SoftwareDocumento24 páginasUnit 2 Computer Hardware and SoftwareNgHanSeongAinda não há avaliações
- Singapore Airlines PDFDocumento10 páginasSingapore Airlines PDF....Ainda não há avaliações
- Sentence HangmanDocumento1 páginaSentence Hangmanwalbee2023Ainda não há avaliações
- OverlandersDocumento17 páginasOverlandersJoe FloodAinda não há avaliações
- LeasePlanIndia-GSTUpdate-June2017.pdf - Filename - UTF-8''LeasePlanIndia-GSTUpdate-June2017 PDFDocumento2 páginasLeasePlanIndia-GSTUpdate-June2017.pdf - Filename - UTF-8''LeasePlanIndia-GSTUpdate-June2017 PDFyogiprathmeshAinda não há avaliações
- MODULE 3 The Footnote and EndnoteDocumento8 páginasMODULE 3 The Footnote and EndnoteJohn Robert LunaAinda não há avaliações
- SiteDocumento6 páginasSiteMikeAinda não há avaliações
- Tom Wolf Mit ThesisDocumento5 páginasTom Wolf Mit Thesisjpcbobkef100% (1)