Você também pode gostar
- Transformación de radón: Revelando patrones ocultos en datos visualesNo EverandTransformación de radón: Revelando patrones ocultos en datos visualesAinda não há avaliações
- Diseño de Perfiles de LevasDocumento31 páginasDiseño de Perfiles de LevasElmer PatpaulAinda não há avaliações
- Leva de Placa Con Seguidor OscilanteDocumento30 páginasLeva de Placa Con Seguidor OscilanteAndres Davila0% (2)
- ARBOLES Y EJES Soporte Teorico2Documento12 páginasARBOLES Y EJES Soporte Teorico2facundoAinda não há avaliações
- Mecanismos de LevasDocumento30 páginasMecanismos de LevasJuan Jhunnior OAAinda não há avaliações
- Tallado de EngranajesDocumento13 páginasTallado de EngranajesRamírez Vilca JulioAinda não há avaliações
- LEVAS PP PDFDocumento21 páginasLEVAS PP PDFCesar GraciaAinda não há avaliações
- Motor v8Documento3 páginasMotor v8Walter R. GonzalezAinda não há avaliações
- Calculo de EngranajesDocumento27 páginasCalculo de EngranajesManuelMYMMidoriAinda não há avaliações
- Circulacion CurvaDocumento12 páginasCirculacion CurvaAndres ArbitoAinda não há avaliações
- Diseño de LevasDocumento11 páginasDiseño de LevasELVIS_001Ainda não há avaliações
- Clase 06 MECANISMOS LEVASDocumento62 páginasClase 06 MECANISMOS LEVASDaniel Felipe Polo GarcíaAinda não há avaliações
- Definición Caja de CambiosDocumento2 páginasDefinición Caja de CambiosPablo Sebastian Villca MamaniAinda não há avaliações
- Diseño de Levas - MecanismosDocumento123 páginasDiseño de Levas - MecanismosSebastián Rivera Pabón100% (1)
- Calculo Del Perfil de Una LevaDocumento24 páginasCalculo Del Perfil de Una LevaBeto Miranda ConsueloAinda não há avaliações
- Engranajes ConicosDocumento18 páginasEngranajes ConicosJonathan Namuche PeñaAinda não há avaliações
- Sistemas de Transmisión MecánicaDocumento27 páginasSistemas de Transmisión MecánicaEduardo Alex Eugenio MendezAinda não há avaliações
- TALLER DE OSCILACIONES para Entregar enDocumento5 páginasTALLER DE OSCILACIONES para Entregar enOmar Arnaldo Bolivar ZambranoAinda não há avaliações
- Trabajo de LevasDocumento10 páginasTrabajo de LevasSaraEdwardAinda não há avaliações
- Tolerancias GeometricasDocumento30 páginasTolerancias GeometricasVictor Rosales Martinez100% (2)
- Ensayos Coast Down 1Documento167 páginasEnsayos Coast Down 1Daniel FredianiAinda não há avaliações
- Cálculos Del Sistema de SuspensionDocumento7 páginasCálculos Del Sistema de Suspensionhenryfabricio2401Ainda não há avaliações
- Instrumentos de TorneriaDocumento3 páginasInstrumentos de TorneriaOscar Fernandez AlconAinda não há avaliações
- Mecanismo DiferencialDocumento11 páginasMecanismo DiferencialAlexander Florez AroneAinda não há avaliações
- Dinamica G9Documento1 páginaDinamica G9Fredy Llano QuispeAinda não há avaliações
- Motor WankelDocumento17 páginasMotor WankelVilCrazy05Ainda não há avaliações
- Engranes ResumenDocumento40 páginasEngranes Resumenvaguito91Ainda não há avaliações
- Levas 1Documento30 páginasLevas 1Maria Soledad Quispe MejiaAinda não há avaliações
- Diseño de EngranajesDocumento8 páginasDiseño de EngranajesLeoAinda não há avaliações
- Monitoreo de Cargas en Maquinas. JUAN FELIPE URIBE C.1824420Documento4 páginasMonitoreo de Cargas en Maquinas. JUAN FELIPE URIBE C.1824420JUAN FELIPE URIBE CIFUENTESAinda não há avaliações
- Analisis de Fuerzas DinamicasDocumento60 páginasAnalisis de Fuerzas DinamicasArielMaldonadoAinda não há avaliações
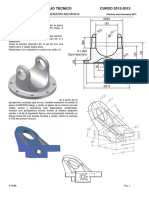
- Dibujo Técnico CURSO 2012-2013: Grado de Ingeniería MecánicaDocumento1 páginaDibujo Técnico CURSO 2012-2013: Grado de Ingeniería MecánicaSantiago López AntónAinda não há avaliações
- Sistema de Direccion Por CremalleraDocumento11 páginasSistema de Direccion Por CremalleraCharl's SanangoAinda não há avaliações
- Medición de RoscasDocumento110 páginasMedición de RoscasMauricio AmtAinda não há avaliações
- Relacion de Reduccion de VelocidadDocumento16 páginasRelacion de Reduccion de VelocidadYahaira GuerreroAinda não há avaliações
- FalconDocumento3 páginasFalconcarlitincho0% (1)
- Capítulo - 03 - Levas - ShigleyDocumento12 páginasCapítulo - 03 - Levas - ShigleyJonathanRVAinda não há avaliações
- Materia Selección de Elementos de Maquinas 10Documento16 páginasMateria Selección de Elementos de Maquinas 10Pablo Javier Fiallos VelascoAinda não há avaliações
- Clasificación de Las Levas y PalpadoresDocumento19 páginasClasificación de Las Levas y Palpadoresjabrito40Ainda não há avaliações
- Engranajes PlanetariosDocumento6 páginasEngranajes PlanetariosKEVIN DALI LARGO MEJIAAinda não há avaliações
- Practica 2 Raúl Hernández Sánchez 0A RobóticaDocumento11 páginasPractica 2 Raúl Hernández Sánchez 0A RobóticaRaúl Hernández SánchezAinda não há avaliações
- Semana 13Documento33 páginasSemana 13miguel angel tecse cariAinda não há avaliações
- Engranes y Trenes de EngranajeDocumento5 páginasEngranes y Trenes de EngranajeRaul GonzalezAinda não há avaliações
- Actividad Fundamental 1Documento10 páginasActividad Fundamental 1Alberto GARCIAAinda não há avaliações
- Calculo Sistema de AdmisionDocumento2 páginasCalculo Sistema de AdmisionJose Cuenca100% (1)
- LevasDocumento63 páginasLevasAlejandro0910100% (1)
- Leva MecanicaDocumento37 páginasLeva MecanicaMokona Akatsuki0% (1)
- Monografia GrupalDocumento14 páginasMonografia GrupalGinaAinda não há avaliações
- Transmisiones EstandarDocumento25 páginasTransmisiones EstandarEmiliano Ruiz HernándezAinda não há avaliações
- Seleccion de RodamientosDocumento6 páginasSeleccion de RodamientosRenata Astudillo100% (1)
- Tipos de Roscas, Machos y TarrajasDocumento22 páginasTipos de Roscas, Machos y Tarrajasnasly lizeth100% (1)
- Microsoft Word - EXAMEN 1 CALC VARIAS VARIABLES ALTDocumento5 páginasMicrosoft Word - EXAMEN 1 CALC VARIAS VARIABLES ALTAdriánÁvilaSarmientoAinda não há avaliações
- Coordenadas Polares I UnidadDocumento39 páginasCoordenadas Polares I UnidadJavierAinda não há avaliações
- Coordenadas PolaresDocumento10 páginasCoordenadas PolaresArmando GarcíaAinda não há avaliações
- Manual Cinematica Dinamica MotorDocumento8 páginasManual Cinematica Dinamica MotorWilliamMauricioFonsecaAvilaAinda não há avaliações
- S5 Cinematica y Dinamica Del PistonDocumento8 páginasS5 Cinematica y Dinamica Del PistonDiego Miranda CuevaAinda não há avaliações
- 15Documento10 páginas15LuisGarciaPerezAinda não há avaliações
- Taller11 MecanismosDocumento8 páginasTaller11 MecanismosJose David Navarro SantiagoAinda não há avaliações
- Material - S05.s1 - Complementario PDFDocumento10 páginasMaterial - S05.s1 - Complementario PDFmatsuri del desiertoAinda não há avaliações
- Energía Libre de Gibbs y Los TerremotosDocumento15 páginasEnergía Libre de Gibbs y Los TerremotosJuan Pablo Velásquez VidalAinda não há avaliações
- Flujo de Fluidos-InformeDocumento7 páginasFlujo de Fluidos-InformeChristopher StaffordAinda não há avaliações
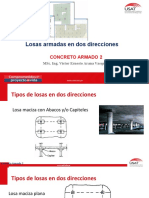
- 3 Losas2DireccionesDocumento37 páginas3 Losas2Direccionesyeny cuevaAinda não há avaliações
- CALORIMETRIADocumento15 páginasCALORIMETRIADylan Vargas AguilarAinda não há avaliações
- Estudio Cuantitativo de La RadioactivadDocumento5 páginasEstudio Cuantitativo de La RadioactivadLeonardo CervantesAinda não há avaliações
- 1.clase 1 FisicoquímicaDocumento24 páginas1.clase 1 FisicoquímicaJuan David Velez EsquivelAinda não há avaliações
- Medidas Electricas IDocumento3 páginasMedidas Electricas ICleiver AullaAinda não há avaliações
- Vibraciones y Ondas - Reflexion y RefraccionDocumento5 páginasVibraciones y Ondas - Reflexion y RefraccionElkin RamirezAinda não há avaliações
- Cuestionario-Molienda Lab 9Documento9 páginasCuestionario-Molienda Lab 9Carlos Condori RomeroAinda não há avaliações
- Lab. 2 PresionesDocumento3 páginasLab. 2 PresionesAngie Julieth Muñoz CerqueraAinda não há avaliações
- Proyecto de La LuzDocumento7 páginasProyecto de La LuzFrida karina AscAinda não há avaliações
- Maquinas 8Documento5 páginasMaquinas 8Jhonathan Ever Meneses LopezAinda não há avaliações
- Informe de Laboratorio 3Documento10 páginasInforme de Laboratorio 3Jimena MartinezAinda não há avaliações
- ELECTROMAGNETISMODocumento6 páginasELECTROMAGNETISMOElena AranaAinda não há avaliações
- Juntas Dielectricas e Interferncias Por Saltos de Corriente de PCDocumento17 páginasJuntas Dielectricas e Interferncias Por Saltos de Corriente de PCHTMAGUAYO1Ainda não há avaliações
- Rectificación de Matricula - Arellano Suarez PDFDocumento1 páginaRectificación de Matricula - Arellano Suarez PDFAlvaroArellanoSuarezAinda não há avaliações
- Manual Del Consultor 2011 01Documento74 páginasManual Del Consultor 2011 01Jimena87% (45)
- Lab FisicaDocumento6 páginasLab FisicaJulian EstebanAinda não há avaliações
- 1 Constante Elastica Ley de Hooke PDFDocumento6 páginas1 Constante Elastica Ley de Hooke PDFandreAinda não há avaliações
- INFORME Resistividad ElectricaDocumento7 páginasINFORME Resistividad Electricahavithi escorcia jamettAinda não há avaliações
- Resumen Mecánica Clásica I 2020B EPN Aider - Jhon Chiliquinga & Kevin CárdenasDocumento110 páginasResumen Mecánica Clásica I 2020B EPN Aider - Jhon Chiliquinga & Kevin CárdenasKAGGHGAinda não há avaliações
- Guia 06Documento4 páginasGuia 06Cecilia MartinezAinda não há avaliações
- PreguntasDocumento2 páginasPreguntasJose beleño bonethAinda não há avaliações
- Taller Tabla PeriòdicaDocumento6 páginasTaller Tabla PeriòdicaNicole AguirreAinda não há avaliações
- Informe 2 Pa RinaDocumento16 páginasInforme 2 Pa RinaAlbert TurpoAinda não há avaliações
- Círculo Unmsm.Documento4 páginasCírculo Unmsm.Arturo Rubén Lozano PérezAinda não há avaliações
- Tarea 3 TermodinamicaDocumento9 páginasTarea 3 TermodinamicaIbañez ErickAinda não há avaliações
- C Y T - Elaboramos Un Circuito Electrico A Partir de Un Recurso NaturalDocumento9 páginasC Y T - Elaboramos Un Circuito Electrico A Partir de Un Recurso NaturalZuler Ynes Gallardo LLacsahuacheAinda não há avaliações