Você também pode gostar
- DATA MINING and MACHINE LEARNING. CLASSIFICATION PREDICTIVE TECHNIQUES: SUPPORT VECTOR MACHINE, LOGISTIC REGRESSION, DISCRIMINANT ANALYSIS and DECISION TREES: Examples with MATLABNo EverandDATA MINING and MACHINE LEARNING. CLASSIFICATION PREDICTIVE TECHNIQUES: SUPPORT VECTOR MACHINE, LOGISTIC REGRESSION, DISCRIMINANT ANALYSIS and DECISION TREES: Examples with MATLABAinda não há avaliações
- 4road Damage DetectionDocumento46 páginas4road Damage DetectionAjit RajAinda não há avaliações
- Autonomous Pedestrian Collision Avoidance Using A Fuzzy Steering ControllerDocumento12 páginasAutonomous Pedestrian Collision Avoidance Using A Fuzzy Steering ControllerSundar C EceAinda não há avaliações
- Motion DetectionDocumento33 páginasMotion DetectionChetan TurkaneAinda não há avaliações
- Motion Blur Detection and Removal in ImagesDocumento3 páginasMotion Blur Detection and Removal in ImagesInternational Journal of Innovative Science and Research TechnologyAinda não há avaliações
- Object Motion Detection in Video Frames Using Background Frame MatchingDocumento4 páginasObject Motion Detection in Video Frames Using Background Frame MatchingseventhsensegroupAinda não há avaliações
- FYPpptDocumento40 páginasFYPpptCosmk1ng Zero-1Ainda não há avaliações
- Image Processing in Road Traf C AnalysisDocumento11 páginasImage Processing in Road Traf C AnalysisAshwiini Vigna BasuthkarAinda não há avaliações
- Pradeep Seminar ReportDocumento28 páginasPradeep Seminar ReportNEERAJAinda não há avaliações
- Road Accident Prevention Using OpenCVDocumento4 páginasRoad Accident Prevention Using OpenCVInternational Journal of Innovative Science and Research TechnologyAinda não há avaliações
- Intelligent Driving System: Bachelor of TechnologyDocumento20 páginasIntelligent Driving System: Bachelor of TechnologyRajaAinda não há avaliações
- Single Shot DetectionDocumento8 páginasSingle Shot DetectionDaniel FleuryAinda não há avaliações
- Synopsis Object DetectionDocumento7 páginasSynopsis Object Detectionkartik sangAinda não há avaliações
- ES 22 Lab ManualDocumento33 páginasES 22 Lab ManualRoselle Joy Dela CruzAinda não há avaliações
- Matlab ManualDocumento16 páginasMatlab Manualishan varshneyAinda não há avaliações
- Traffic Object Detection Literature SurveyDocumento8 páginasTraffic Object Detection Literature SurveyperumalvigneshAinda não há avaliações
- Lab ManualDocumento24 páginasLab ManualASHVINI GAUTAMAinda não há avaliações
- Web of Science and Web of KnowledgeDocumento10 páginasWeb of Science and Web of KnowledgenirnawulanAinda não há avaliações
- Vehicle Anti Collision Using Ultrasonic SignalsDocumento22 páginasVehicle Anti Collision Using Ultrasonic SignalsAakash GuptaAinda não há avaliações
- Object PDFDocumento6 páginasObject PDFsudheerAinda não há avaliações
- Research ProposalDocumento1 páginaResearch ProposalSowmitraDasAinda não há avaliações
- The Concept of Crashless Cars &: Anti Collision DevicesDocumento2 páginasThe Concept of Crashless Cars &: Anti Collision Devicessourabh ChoudhuryAinda não há avaliações
- Accident Protection System Using Electromagnetic Abs Braking SystemDocumento26 páginasAccident Protection System Using Electromagnetic Abs Braking SystemCODING CHANNELAinda não há avaliações
- Image Segmentation For Object Detection Using Mask R-CNN in ColabDocumento5 páginasImage Segmentation For Object Detection Using Mask R-CNN in ColabGRD JournalsAinda não há avaliações
- Deep Learning in Object Detection, PDFDocumento64 páginasDeep Learning in Object Detection, PDFRaghavendra ShettyAinda não há avaliações
- Microprocessor and Microcontrroller Module 1 - Calicut UniversityDocumento32 páginasMicroprocessor and Microcontrroller Module 1 - Calicut UniversityAshwin GopinathAinda não há avaliações
- Chapter 2 - Literature Reviews: 2.1 Application of Electronic in AutomotiveDocumento23 páginasChapter 2 - Literature Reviews: 2.1 Application of Electronic in AutomotiveMuhamad AdibAinda não há avaliações
- STM32 Primer2 ManualDocumento25 páginasSTM32 Primer2 ManualRobert KovacsAinda não há avaliações
- Voltage Stabilizer Buying GuideDocumento5 páginasVoltage Stabilizer Buying GuideSurya Kiran KAinda não há avaliações
- Classification Using Deep Learning NetworksDocumento27 páginasClassification Using Deep Learning NetworksWaheed NangigaddaAinda não há avaliações
- ARM - Module 1Documento67 páginasARM - Module 1Somashekar KrishnappaAinda não há avaliações
- Accident DetectionDocumento35 páginasAccident DetectionAlmubeenAinda não há avaliações
- Ultrasonic Glasses For Blinds 3Documento19 páginasUltrasonic Glasses For Blinds 3shradha anandAinda não há avaliações
- Object DetectionDocumento4 páginasObject DetectionnamanAinda não há avaliações
- Prathmesh PPT NewDocumento16 páginasPrathmesh PPT NewPrathamesh GawliAinda não há avaliações
- Object Detection Using Convolution Al Neural NetworksDocumento6 páginasObject Detection Using Convolution Al Neural NetworksAnita JaiswalAinda não há avaliações
- PIC MicrocontrollerDocumento27 páginasPIC Microcontrollermuthai100% (1)
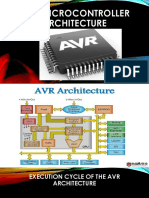
- Avr Microcontroller ArchitectureDocumento4 páginasAvr Microcontroller ArchitectureIbrahim KhaledAinda não há avaliações
- Collision Avoidance Control With SteeringDocumento7 páginasCollision Avoidance Control With SteeringDavid MartínezAinda não há avaliações
- PIC MicrocontrollersDocumento40 páginasPIC MicrocontrollersRamaDinakaranAinda não há avaliações
- Title in Caps (Font Size 16) : Visvesvaraya Technological University, BelagaviDocumento11 páginasTitle in Caps (Font Size 16) : Visvesvaraya Technological University, Belagavidarshan kuppaswamyAinda não há avaliações
- Computer VisionDocumento41 páginasComputer VisionHarish ParuchuriAinda não há avaliações
- IEEE TemplateDocumento4 páginasIEEE TemplateMujeeb AbdullahAinda não há avaliações
- EMBEDDED PPTDocumento23 páginasEMBEDDED PPTArun Kumar MAAinda não há avaliações
- Unit 4 Architectural Approach For IoTDocumento14 páginasUnit 4 Architectural Approach For IoTtrupti.kodinariya98100% (1)
- Motion Object Detection Using Mean Square Error MethodDocumento5 páginasMotion Object Detection Using Mean Square Error MethodInternational Journal of Innovative Science and Research TechnologyAinda não há avaliações
- PIC MicrocontrollerDocumento26 páginasPIC MicrocontrollerK.R.Raguram100% (1)
- Multithreading and Exception HandlingDocumento40 páginasMultithreading and Exception HandlingBalakrishnan.GAinda não há avaliações
- Visvesvaraya Technological University, Belgaum: Technical Seminar Report OnDocumento18 páginasVisvesvaraya Technological University, Belgaum: Technical Seminar Report OnShyam RajAinda não há avaliações
- SavengyDocumento8 páginasSavengyvikram122Ainda não há avaliações
- Course Overview and 8051 Architecture Rv01Documento22 páginasCourse Overview and 8051 Architecture Rv01saidarao2012Ainda não há avaliações
- Object DetectionDocumento15 páginasObject Detectionapi-3719303100% (1)
- Group13 Ecea200-1l FinalmanuscriptDocumento57 páginasGroup13 Ecea200-1l FinalmanuscriptKim Andre MacaraegAinda não há avaliações
- Microprocessor - Overview: How Does A Microprocessor Work?Documento8 páginasMicroprocessor - Overview: How Does A Microprocessor Work?vedavyas99Ainda não há avaliações
- 8051 IntroDocumento18 páginas8051 Introusha narayanAinda não há avaliações
- Object Detection and Segmentation On Tensor Flow UsingDocumento10 páginasObject Detection and Segmentation On Tensor Flow UsingspiroAinda não há avaliações
- Matlab Lab ManualDocumento22 páginasMatlab Lab Manualticpony0% (1)
- DHT11Documento3 páginasDHT11Hero AroraAinda não há avaliações
- 1.1 Purpose: 1.2 Scope: 1.3 Motivation: 1.4 OverviewDocumento22 páginas1.1 Purpose: 1.2 Scope: 1.3 Motivation: 1.4 OverviewVikram ComputerInstitute100% (1)
- Smt. Indira Gandhi College of Engineering Navi Mumbai. Accredited by NAAC With A GradeDocumento16 páginasSmt. Indira Gandhi College of Engineering Navi Mumbai. Accredited by NAAC With A GradeTejas MayekarAinda não há avaliações
- Chapter 2 DMMDocumento57 páginasChapter 2 DMMPratibha GoswamiAinda não há avaliações
- MCSE004 Dec2013 SolutionDocumento14 páginasMCSE004 Dec2013 SolutionajayAinda não há avaliações
- Assignment 2Documento3 páginasAssignment 2Hussein EssaAinda não há avaliações
- Neural Language Model, RNNS: Pawan GoyalDocumento15 páginasNeural Language Model, RNNS: Pawan GoyalBhushan Raju GolaniAinda não há avaliações
- Unidad 2 Algebra Lineal Actividad 3 Representación Matricial Método de Eliminación de Gauss Blanca Ahirely Llovera HernandezDocumento5 páginasUnidad 2 Algebra Lineal Actividad 3 Representación Matricial Método de Eliminación de Gauss Blanca Ahirely Llovera HernandezAlejandro HernandezAinda não há avaliações
- MKL 2017 Developer Reference CDocumento2.496 páginasMKL 2017 Developer Reference CQingZhen MaAinda não há avaliações
- 02 Sampling Quantization InterpolationDocumento72 páginas02 Sampling Quantization Interpolationsaday100% (1)
- AML 03 Dense Neural NetworksDocumento20 páginasAML 03 Dense Neural NetworksVaibhavAinda não há avaliações
- YOLO V3 ML ProjectDocumento15 páginasYOLO V3 ML ProjectAnnie ShuklaAinda não há avaliações
- Lecture 9Documento179 páginasLecture 9Ram Kripal MishraAinda não há avaliações
- 2.algebraic Expressions (Special Products and Factoring)Documento21 páginas2.algebraic Expressions (Special Products and Factoring)Jake Carlo WongAinda não há avaliações
- Dynamic ProgrammingDocumento5 páginasDynamic ProgrammingCheslyn EspadaAinda não há avaliações
- Numerical Solution of Ordinary Differential Equations (ODE) : Initial Value Problem (IVP)Documento22 páginasNumerical Solution of Ordinary Differential Equations (ODE) : Initial Value Problem (IVP)আসিফ রেজাAinda não há avaliações
- REG NO. 18MIS7099 Machine Learning - Lab - 10 Name: Dana Vamsi KrishnaDocumento5 páginasREG NO. 18MIS7099 Machine Learning - Lab - 10 Name: Dana Vamsi Krishnaram vamsiAinda não há avaliações
- Reinforcement Learning For Combinatorial Optimization: A SurveyDocumento24 páginasReinforcement Learning For Combinatorial Optimization: A SurveyLolo Cha9chou9Ainda não há avaliações
- List of Metaphor-Based MetaheuristicsDocumento5 páginasList of Metaphor-Based Metaheuristicsredix pereiraAinda não há avaliações
- A Uniform Approach To Obtain Diagonal Sets in Complexity ClassesDocumento9 páginasA Uniform Approach To Obtain Diagonal Sets in Complexity Classestianrong linAinda não há avaliações
- SMA 3261 - Lecture 5 - Newton-Raphson - MethodDocumento4 páginasSMA 3261 - Lecture 5 - Newton-Raphson - MethodIanAinda não há avaliações
- Aaa3 ManifesDocumento5 páginasAaa3 ManifesgarriyakAinda não há avaliações
- Chapter TwoDocumento14 páginasChapter TwoHanan ShayiboAinda não há avaliações
- Yolo: You Only Look Once: Unified Real-Time Object DetectionDocumento60 páginasYolo: You Only Look Once: Unified Real-Time Object DetectionKrishna ModakAinda não há avaliações
- CHE3001 Computational Methods in Process Engineering: Instructor Assistant Professor SeniorDocumento39 páginasCHE3001 Computational Methods in Process Engineering: Instructor Assistant Professor SeniorAmol RastogiAinda não há avaliações
- Deep Learning - Creating MindsDocumento2 páginasDeep Learning - Creating MindsSANEEV KUMAR DASAinda não há avaliações
- Assignment 3 2021Documento3 páginasAssignment 3 2021Prajot PatneAinda não há avaliações
- Answer The Following Questions: Q1: Choose The Correct Answer (20 Points)Documento13 páginasAnswer The Following Questions: Q1: Choose The Correct Answer (20 Points)Viraj JeewanthaAinda não há avaliações
- Numerical Methods With ExcelDocumento17 páginasNumerical Methods With Excelsohail66794154Ainda não há avaliações
- QUESTION PAPER SET Data Structures CSEDocumento4 páginasQUESTION PAPER SET Data Structures CSEPallavan TrustAinda não há avaliações
- CENTRAL DIFFERENCE INTERPOLATION FORMULA Exercises With SolutionDocumento3 páginasCENTRAL DIFFERENCE INTERPOLATION FORMULA Exercises With Solutiongil tabionAinda não há avaliações
- Complex TrussesDocumento1 páginaComplex TrussesKristine Paula Gabrillo Tiong0% (2)
- 3 - Algebraic ExpressionDocumento23 páginas3 - Algebraic ExpressionCeledonio, Joanah Mae B.Ainda não há avaliações