Você também pode gostar
- UNIT-III Geometric ModelingDocumento139 páginasUNIT-III Geometric ModelingSuhasAinda não há avaliações
- Unit II Curves & SurfacesDocumento57 páginasUnit II Curves & Surfacesvishwajeet patilAinda não há avaliações
- Unit-4-Computer Aided DesignDocumento15 páginasUnit-4-Computer Aided DesignMuthuvel M100% (2)
- Fem Notes PDFDocumento2 páginasFem Notes PDFRolandAinda não há avaliações
- Unit V Assembly of Parts and Product Data ExchangeDocumento104 páginasUnit V Assembly of Parts and Product Data Exchangepalaniappan_pandian100% (1)
- KOM Important QuestionsDocumento12 páginasKOM Important QuestionsJithin KAinda não há avaliações
- Engineering Drawing - N. D. BhattDocumento129 páginasEngineering Drawing - N. D. BhattAsh71% (17)
- Unit-2-Computer Aided DesignDocumento42 páginasUnit-2-Computer Aided DesignMuthuvel M80% (5)
- Nonlinear Ordinary Differential Equations in Transport ProcessesNo EverandNonlinear Ordinary Differential Equations in Transport ProcessesAinda não há avaliações
- Kinematics of Machinery Lecturer Notes All 5 UnitsDocumento45 páginasKinematics of Machinery Lecturer Notes All 5 Unitskumaravel07Ainda não há avaliações
- AutoCAD VIVADocumento6 páginasAutoCAD VIVADeva RajAinda não há avaliações
- Viva QuestionDocumento4 páginasViva QuestionBarathkannan Lakshmi PalanichamyAinda não há avaliações
- Chapter 5Documento112 páginasChapter 5Karthik RajashekarAinda não há avaliações
- ME6601 Design of Transmission Systems 2 Marks With AnswersDocumento6 páginasME6601 Design of Transmission Systems 2 Marks With Answerspremgmech762Ainda não há avaliações
- Engineering-Curves 1Documento17 páginasEngineering-Curves 1api-327264533Ainda não há avaliações
- Design of Transmission System Question BankDocumento18 páginasDesign of Transmission System Question BankAravind50% (2)
- Projection of PlanesDocumento36 páginasProjection of Planespradeep75% (4)
- Unit-III, Advanced Mechanisms PDFDocumento41 páginasUnit-III, Advanced Mechanisms PDFvamsi krishnaAinda não há avaliações
- Me 6603 - Finite Element Analysis: Part A Questions With Answers Unit 1Documento14 páginasMe 6603 - Finite Element Analysis: Part A Questions With Answers Unit 1Karthik SubramaniAinda não há avaliações
- Ppce MCQDocumento17 páginasPpce MCQGunasekaran Jagadeesan100% (1)
- 18EGDL15-Engg Graphics PDFDocumento91 páginas18EGDL15-Engg Graphics PDFKalyan Kumar0% (1)
- Bcme NotesDocumento112 páginasBcme NotesSms RajaAinda não há avaliações
- Experimental Stress Analysis PaperDocumento2 páginasExperimental Stress Analysis PaperAbdul FattahAinda não há avaliações
- Introduction To Engineering MechanicsDocumento11 páginasIntroduction To Engineering MechanicsFarieysha Binti Rohzi.Ainda não há avaliações
- ME2029 DJF 2 Marks +16 Mark QuestionsDocumento15 páginasME2029 DJF 2 Marks +16 Mark QuestionssureshkumarAinda não há avaliações
- Sectional OrthographicDocumento80 páginasSectional OrthographicKrish Hams100% (1)
- Workshop Manual 15wsl24 PDFDocumento94 páginasWorkshop Manual 15wsl24 PDFZiyauddin SeikhAinda não há avaliações
- Practice Problems For Autocad 2011Documento122 páginasPractice Problems For Autocad 2011Mandi Masood AsferAinda não há avaliações
- Dynamics of Machines Unit-1Documento50 páginasDynamics of Machines Unit-1jasvindersinghsaggu0% (1)
- 40905-Engineering Graphics PDFDocumento2 páginas40905-Engineering Graphics PDFKrishna MurthyAinda não há avaliações
- EG Bridge CourseDocumento45 páginasEG Bridge Coursekrunal07786Ainda não há avaliações
- One-Dimensional ProblemsDocumento45 páginasOne-Dimensional Problemsajith kumarAinda não há avaliações
- Lecture07-Sections of SolidsDocumento95 páginasLecture07-Sections of SolidsKajal KhanAinda não há avaliações
- FEA QuizDocumento48 páginasFEA QuizKiran Kumar Yadav100% (1)
- Curves and Surface Computer GraphicsDocumento70 páginasCurves and Surface Computer GraphicsUrvashi Bhardwaj100% (1)
- Theory of Machine Unit 1Documento122 páginasTheory of Machine Unit 1Deepak PrajapatAinda não há avaliações
- Unit Iii Visual RealismDocumento59 páginasUnit Iii Visual RealismJabin JoeAinda não há avaliações
- Machine Tool Engineering DesignDocumento34 páginasMachine Tool Engineering DesignAshok Kumar UppariAinda não há avaliações
- Theory of MachineDocumento21 páginasTheory of MachineVaibhav Vithoba NaikAinda não há avaliações
- Midterm Exam Vib 3 Industrial 2015Documento3 páginasMidterm Exam Vib 3 Industrial 2015Judex OnyekabaAinda não há avaliações
- FEM-2 Marks and 16 Marks AnsDocumento34 páginasFEM-2 Marks and 16 Marks AnsDineshAinda não há avaliações
- Finite Element Analysis: Two Mark Questions and AnswerDocumento7 páginasFinite Element Analysis: Two Mark Questions and AnswerChenthil KumarAinda não há avaliações
- Lesson 9 Development of Surfaces - IDocumento12 páginasLesson 9 Development of Surfaces - IAKSHANSH MATHURAinda não há avaliações
- Mechanics of Material - SyllabusDocumento2 páginasMechanics of Material - SyllabusRahul PatilAinda não há avaliações
- Subject Metal Cutting and Tool Design de PDFDocumento2 páginasSubject Metal Cutting and Tool Design de PDFBabuli KumarAinda não há avaliações
- Engineering Mathematics 3Documento3 páginasEngineering Mathematics 3kumudba zalaAinda não há avaliações
- Cotter Joint - Design Procedure, Problems & Question AnswerDocumento15 páginasCotter Joint - Design Procedure, Problems & Question AnswernkchandruAinda não há avaliações
- CS8251 Programming in CDocumento32 páginasCS8251 Programming in CShrutiAinda não há avaliações
- ME6603 Finite Element AnalysisDocumento18 páginasME6603 Finite Element Analysissanthanam102Ainda não há avaliações
- Machine Drawing Two Mark QuestionsDocumento13 páginasMachine Drawing Two Mark QuestionsHimanshuSisodiyaAinda não há avaliações
- Cadcam Geometric ModelingDocumento31 páginasCadcam Geometric ModelingPankaj ChhabraAinda não há avaliações
- Computer Aided Machine DrawingDocumento1 páginaComputer Aided Machine DrawingKAMAL SINGHAinda não há avaliações
- Kom Unit 2Documento24 páginasKom Unit 2Muthuvel M100% (3)
- Differential Transformation Method for Mechanical Engineering ProblemsNo EverandDifferential Transformation Method for Mechanical Engineering ProblemsAinda não há avaliações
- Numerical Solution of Partial Differential Equations—II, Synspade 1970: Proceedings of the Second Symposium on the Numerical Solution of Partial Differential Equations, SYNSPADE 1970, Held at the University of Maryland, College Park, Maryland, May 11-15, 1970No EverandNumerical Solution of Partial Differential Equations—II, Synspade 1970: Proceedings of the Second Symposium on the Numerical Solution of Partial Differential Equations, SYNSPADE 1970, Held at the University of Maryland, College Park, Maryland, May 11-15, 1970Bert HubbardAinda não há avaliações
- 842-Article Text-1522-1-10-20200530Documento6 páginas842-Article Text-1522-1-10-20200530Oupala SoulinsomphouAinda não há avaliações
- Comparison On PCA ICA and LDA in Face RecognitionDocumento4 páginasComparison On PCA ICA and LDA in Face RecognitionIIR indiaAinda não há avaliações
- Hierarchical Vertebral Body Segmentation Using Graph Cuts and Statistical Shape ModellingDocumento5 páginasHierarchical Vertebral Body Segmentation Using Graph Cuts and Statistical Shape ModellingijtetjournalAinda não há avaliações
- Lathe Accessories: Work Holding Tool HoldingDocumento33 páginasLathe Accessories: Work Holding Tool HoldingSuhasAinda não há avaliações
- Estimation of Machining TimeDocumento6 páginasEstimation of Machining TimeSuhas100% (1)
- Dmm-I Unit-1new PDFDocumento135 páginasDmm-I Unit-1new PDFsrikanth anumaAinda não há avaliações
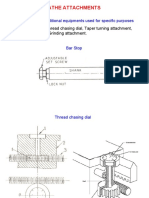
- Lathe AttachmentsDocumento8 páginasLathe AttachmentsSuhasAinda não há avaliações
- High Pressure BoilersDocumento16 páginasHigh Pressure BoilersDhruv Sharma100% (4)
- Estimation of Machining TimeDocumento6 páginasEstimation of Machining TimeSuhasAinda não há avaliações
- Dmm-I Unit-1new PDFDocumento135 páginasDmm-I Unit-1new PDFsrikanth anumaAinda não há avaliações
- Introduction To BoilersDocumento22 páginasIntroduction To BoilersSuhasAinda não há avaliações
- Unit II Computer GraphicsDocumento30 páginasUnit II Computer GraphicsSuhasAinda não há avaliações
- Unit II TransformationsDocumento39 páginasUnit II TransformationsSuhasAinda não há avaliações
- Introduction To BoilersDocumento22 páginasIntroduction To BoilersSuhasAinda não há avaliações
- Unit II Hidden Surface Removal MethodsDocumento22 páginasUnit II Hidden Surface Removal MethodsSuhasAinda não há avaliações
- Unit III Geometrical Modelling Intro and Curve RepresentationDocumento40 páginasUnit III Geometrical Modelling Intro and Curve RepresentationSuhasAinda não há avaliações
- Unit II Windowing and ClippingDocumento36 páginasUnit II Windowing and ClippingSuhasAinda não há avaliações
- Unit III Solid ModellingDocumento63 páginasUnit III Solid ModellingSuhasAinda não há avaliações
- Unit III Surface ModellingDocumento24 páginasUnit III Surface ModellingSuhasAinda não há avaliações
- UNIT-II Computer GraphicsDocumento91 páginasUNIT-II Computer GraphicsSuhasAinda não há avaliações
- Cad IntroductionDocumento39 páginasCad IntroductionSuhasAinda não há avaliações
- UNIT-III Automated Drafting FecilitiesDocumento78 páginasUNIT-III Automated Drafting FecilitiesSuhasAinda não há avaliações
- Cad Introduction PDFDocumento39 páginasCad Introduction PDFSuhasAinda não há avaliações
- Addmath Water Fall EditDocumento11 páginasAddmath Water Fall EditFidelAinda não há avaliações
- 2 6aDocumento1 página2 6amcd2dstAinda não há avaliações
- Homework Diff 2 PDFDocumento11 páginasHomework Diff 2 PDFKking ChungAinda não há avaliações
- Chapter 1 - Groups and FieldsDocumento33 páginasChapter 1 - Groups and FieldsChristopherAinda não há avaliações
- Name: Teacher: Date: Score:: Converting Between Percents, Decimals, and FractionsDocumento2 páginasName: Teacher: Date: Score:: Converting Between Percents, Decimals, and FractionsL'arc WillAinda não há avaliações
- Similar TrianglesDocumento10 páginasSimilar TrianglesJimmy Lin100% (1)
- Chapter 2: Inequalities and Absolute ValuesDocumento4 páginasChapter 2: Inequalities and Absolute Valueszan2812Ainda não há avaliações
- (Maa 3.9) More Trigonometric FunctionsDocumento18 páginas(Maa 3.9) More Trigonometric FunctionsAli GorganiAinda não há avaliações
- OrthogonalDocumento124 páginasOrthogonalthuannm0426Ainda não há avaliações
- June 2014 Question Paper 21 PDFDocumento24 páginasJune 2014 Question Paper 21 PDFUmnah SaifAinda não há avaliações
- Mathematics: Quarter 2 - Module 2: Solving Problems Involving Polynomial FunctionsDocumento19 páginasMathematics: Quarter 2 - Module 2: Solving Problems Involving Polynomial FunctionsAndreaAinda não há avaliações
- Precalculus:: A Self-Learning Module For STEM 11Documento27 páginasPrecalculus:: A Self-Learning Module For STEM 11Raffy Jay JaminAinda não há avaliações
- Unit I Mathematical Tools 1.1 Basic Mathematics For Physics: I. Quadratic Equation and Its SolutionDocumento16 páginasUnit I Mathematical Tools 1.1 Basic Mathematics For Physics: I. Quadratic Equation and Its Solutioninsap_dineshAinda não há avaliações
- Pre Calculus Reviewer Chap3 Trigonometry 1Documento15 páginasPre Calculus Reviewer Chap3 Trigonometry 1ndjwndnnd sjwjhsbdbdbdAinda não há avaliações
- Squares and Square RootsDocumento3 páginasSquares and Square RootsCharline FergusonAinda não há avaliações
- Lec 1 MA102Documento13 páginasLec 1 MA102Hmingsanga HauhnarAinda não há avaliações
- WangY SB TheoremDocumento11 páginasWangY SB Theoremgusty76Ainda não há avaliações
- 2050A Solution 3Documento2 páginas2050A Solution 3Samuel Alfonzo Gil BarcoAinda não há avaliações
- CBSE Class 11 Physics Motion in A Plane 1Documento2 páginasCBSE Class 11 Physics Motion in A Plane 1Punyo SarmingAinda não há avaliações
- - .pdf;filename - = UTF-8''قاموس الرياضيات الموجزDocumento31 páginas- .pdf;filename - = UTF-8''قاموس الرياضيات الموجزselmaAinda não há avaliações
- 8.1-8.2 - Polar Coordinates and GraphsDocumento14 páginas8.1-8.2 - Polar Coordinates and GraphsRalph Moses PadillaAinda não há avaliações
- Math 7 Module First QuarterDocumento75 páginasMath 7 Module First QuarterXiv NixAinda não há avaliações
- MATA29 Assignment 1 - Functions (BLANK)Documento7 páginasMATA29 Assignment 1 - Functions (BLANK)annaAinda não há avaliações
- (Akira Takayama) Analytical Methods in EconomicsDocumento693 páginas(Akira Takayama) Analytical Methods in EconomicsCarla Valverde España100% (4)
- Abstract AlgebraDocumento25 páginasAbstract Algebraanlys_abon0% (1)
- Phase Plane AnalysisDocumento83 páginasPhase Plane AnalysisDerry RenaldyAinda não há avaliações
- 2014 MetrobankDocumento11 páginas2014 MetrobankZaracruz CortezAinda não há avaliações
- Precalculus - Worksheet: FX X X X FDocumento3 páginasPrecalculus - Worksheet: FX X X X FteachopensourceAinda não há avaliações
- Maths WorkDocumento4 páginasMaths WorkNarvinAinda não há avaliações
- Stability: Solutions To Case Studies ChallengesDocumento50 páginasStability: Solutions To Case Studies Challenges廖偉丞Ainda não há avaliações