Você também pode gostar
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeNo EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeNota: 4 de 5 estrelas4/5 (5794)
- The Yellow House: A Memoir (2019 National Book Award Winner)No EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Nota: 4 de 5 estrelas4/5 (98)
- Resulam Portfolio (Published Books and Apps) For Minority Languages by Resulam Resurrection Des Langues MinoritairesDocumento8 páginasResulam Portfolio (Published Books and Apps) For Minority Languages by Resulam Resurrection Des Langues MinoritairesRodrigue TchamnaAinda não há avaliações
- Resulam Portfolio - Selected WorkDocumento3 páginasResulam Portfolio - Selected WorkRodrigue TchamnaAinda não há avaliações
- Presentation Introduction To Virtual Reality in SimulinkDocumento19 páginasPresentation Introduction To Virtual Reality in SimulinkRodrigue Tchamna0% (1)
- Cover (Couverture) Grammaire NufiDocumento1 páginaCover (Couverture) Grammaire NufiRodrigue TchamnaAinda não há avaliações
- Diagram Manipulation and Reduction Control SystemsDocumento24 páginasDiagram Manipulation and Reduction Control SystemsRodrigue TchamnaAinda não há avaliações
- Acrostiche Nufi (Fe'efe'e)Documento2 páginasAcrostiche Nufi (Fe'efe'e)Rodrigue TchamnaAinda não há avaliações
- Head Parts in Fe'efe'e (Nufi) Language 2Documento1 páginaHead Parts in Fe'efe'e (Nufi) Language 2Rodrigue TchamnaAinda não há avaliações
- Intermediate English French WordlistDocumento49 páginasIntermediate English French WordlistRodrigue TchamnaAinda não há avaliações
- Lorenz 2Documento9 páginasLorenz 2Rodrigue TchamnaAinda não há avaliações
- Europe Countries and Seas MapsDocumento1 páginaEurope Countries and Seas MapsRodrigue TchamnaAinda não há avaliações
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryNo EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryNota: 3.5 de 5 estrelas3.5/5 (231)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceNo EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceNota: 4 de 5 estrelas4/5 (895)
- The Little Book of Hygge: Danish Secrets to Happy LivingNo EverandThe Little Book of Hygge: Danish Secrets to Happy LivingNota: 3.5 de 5 estrelas3.5/5 (400)
- Never Split the Difference: Negotiating As If Your Life Depended On ItNo EverandNever Split the Difference: Negotiating As If Your Life Depended On ItNota: 4.5 de 5 estrelas4.5/5 (838)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureNo EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureNota: 4.5 de 5 estrelas4.5/5 (474)
- The Emperor of All Maladies: A Biography of CancerNo EverandThe Emperor of All Maladies: A Biography of CancerNota: 4.5 de 5 estrelas4.5/5 (271)
- Team of Rivals: The Political Genius of Abraham LincolnNo EverandTeam of Rivals: The Political Genius of Abraham LincolnNota: 4.5 de 5 estrelas4.5/5 (234)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaNo EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaNota: 4.5 de 5 estrelas4.5/5 (266)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersNo EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersNota: 4.5 de 5 estrelas4.5/5 (344)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyNo EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyNota: 3.5 de 5 estrelas3.5/5 (2259)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreNo EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreNota: 4 de 5 estrelas4/5 (1090)
- The Unwinding: An Inner History of the New AmericaNo EverandThe Unwinding: An Inner History of the New AmericaNota: 4 de 5 estrelas4/5 (45)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)No EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Nota: 4.5 de 5 estrelas4.5/5 (121)
- Pankaj Final Industrial Training Report 1234Documento36 páginasPankaj Final Industrial Training Report 1234pankaj madhheshiyaAinda não há avaliações
- Poptronics 1970 10Documento120 páginasPoptronics 1970 10marcelo vintageAinda não há avaliações
- Eric 9001 EngDocumento2 páginasEric 9001 EngHenri KleineAinda não há avaliações
- Electric Start HandbookDocumento179 páginasElectric Start HandbookGeronimo JaimeAinda não há avaliações
- IEC 60364 5-53-2015 Electrical Installations of Buildings Part 5 53 Selection and Erection of Electrical Equipments Isolation Switching and ControlDocumento256 páginasIEC 60364 5-53-2015 Electrical Installations of Buildings Part 5 53 Selection and Erection of Electrical Equipments Isolation Switching and ControlCarlos David Palma MalavéAinda não há avaliações
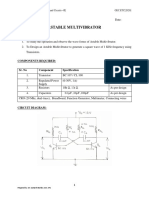
- Expt 9 - Astable-Multivibrator (2020)Documento5 páginasExpt 9 - Astable-Multivibrator (2020)samarth100% (1)
- Monitor Module S-A4042Documento2 páginasMonitor Module S-A4042Ashiq Salman100% (1)
- Is - 2026Documento7 páginasIs - 2026Qadri FaizanAinda não há avaliações
- Module3 PDFDocumento37 páginasModule3 PDFSadananda KrrishAinda não há avaliações
- Nec2008rop PDFDocumento998 páginasNec2008rop PDFАлексейAinda não há avaliações
- How The Voltage Reference Affects ADC Design Part 2 PDFDocumento6 páginasHow The Voltage Reference Affects ADC Design Part 2 PDFThanos van RamAinda não há avaliações
- Very Simple DIY Battery Tester - Schematics & ConstructionDocumento5 páginasVery Simple DIY Battery Tester - Schematics & Constructionbnc1Ainda não há avaliações
- STATCOMDocumento17 páginasSTATCOMAbdel-Rahman Saifedin ArandasAinda não há avaliações
- Communication To The Solar Industry On Shams Dubai - 2020Documento1 páginaCommunication To The Solar Industry On Shams Dubai - 2020jayapalAinda não há avaliações
- NIC Components NVS SeriesDocumento3 páginasNIC Components NVS SeriesNICCompAinda não há avaliações
- Renr5807renr5807 01 Sis PDFDocumento2 páginasRenr5807renr5807 01 Sis PDFLeonardo Romero JimenezAinda não há avaliações
- 2SK4085LS - 500V, 16aDocumento5 páginas2SK4085LS - 500V, 16aRenatoMaiaAinda não há avaliações
- Konica Minolta Bizhub C6500 Field Service Total ManualDocumento1.231 páginasKonica Minolta Bizhub C6500 Field Service Total ManualChristopher Collins77% (22)
- CCTV Installation Guide PDFDocumento6 páginasCCTV Installation Guide PDFMohammed Shukkur100% (6)
- Operacion Modulo y Codigos de FallaDocumento21 páginasOperacion Modulo y Codigos de FallaJimmyJavierTorresSalas100% (1)
- HV Connectors Test Report PDFDocumento21 páginasHV Connectors Test Report PDFMohammed ShoaibAinda não há avaliações
- BKL MCB - Leaflet - EN - 202401Documento4 páginasBKL MCB - Leaflet - EN - 202401Susanto JongAinda não há avaliações
- Chapter 04 - MM-FR-CT005-BE-2251-50-2004-00-CDocumento64 páginasChapter 04 - MM-FR-CT005-BE-2251-50-2004-00-CRonaldo LamarhAinda não há avaliações
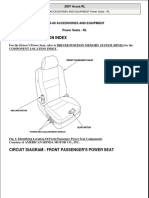
- Power SeatsDocumento4 páginasPower Seatsmkisa70Ainda não há avaliações
- 3BSE020923R301 S800 IO General Information and Installation - Users GuideDocumento174 páginas3BSE020923R301 S800 IO General Information and Installation - Users GuideMatringeAinda não há avaliações
- TESTRANO 600 Getting Started ENUDocumento44 páginasTESTRANO 600 Getting Started ENUAitor LarrenAinda não há avaliações
- ABB Isomax Circuit BreakersDocumento53 páginasABB Isomax Circuit BreakersAshish GuptaAinda não há avaliações
- Skin Effect in Transmission LinesDocumento13 páginasSkin Effect in Transmission Linesthilini100% (1)
- Lead Acid Battery Training by EnerSys at IEEE 02-21-13 PDFDocumento134 páginasLead Acid Battery Training by EnerSys at IEEE 02-21-13 PDFDanny NjomanAinda não há avaliações
- New Construction FIRE ALARM ChecklistDocumento2 páginasNew Construction FIRE ALARM ChecklistThein TunAinda não há avaliações