Você também pode gostar
- Analizador de EspectroDocumento11 páginasAnalizador de Espectroapi-3775762100% (5)
- Pastillero Inteligente Con ArduinoDocumento6 páginasPastillero Inteligente Con Arduinouziel floresAinda não há avaliações
- Tema 11Documento32 páginasTema 11api-27535945100% (1)
- Tema 5Documento57 páginasTema 5api-27535945100% (2)
- Tema 15Documento54 páginasTema 15api-27535945100% (1)
- Libro Final v1 29102009 555Documento94 páginasLibro Final v1 29102009 555api-27535945Ainda não há avaliações
- Tema 15Documento24 páginasTema 15api-27535945100% (3)
- Tema 13Documento32 páginasTema 13api-27535945Ainda não há avaliações
- Tema 5aDocumento4 páginasTema 5aapi-27535945Ainda não há avaliações
- Tema 4Documento27 páginasTema 4api-27535945100% (2)
- Tema 3Documento11 páginasTema 3api-27535945Ainda não há avaliações
- Tema 9Documento31 páginasTema 9api-27535945Ainda não há avaliações
- Tema 16Documento34 páginasTema 16api-27535945Ainda não há avaliações
- Amplificador LogartmicoDocumento4 páginasAmplificador LogartmicoJeyson David GiraldoAinda não há avaliações
- Lab Oratorio FusionDocumento3 páginasLab Oratorio Fusionapi-27535945Ainda não há avaliações
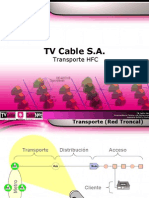
- Arquitecturas Redes CatvDocumento54 páginasArquitecturas Redes Catvapi-27535945100% (3)
- Circuitos Integrados ElementalesDocumento26 páginasCircuitos Integrados Elementalesmarioromo100% (2)
- Tema 1Documento61 páginasTema 1api-27535945100% (2)
- Tema 2Documento56 páginasTema 2api-27535945100% (1)
- Tema V VIDocumento4 páginasTema V VIapi-27535945Ainda não há avaliações
- Transparencias de FiltrosDocumento37 páginasTransparencias de Filtrosapi-27535945100% (1)
- PracticaDocumento5 páginasPracticaapi-27535945100% (1)
- Amplificador Operacional FundamentosDocumento14 páginasAmplificador Operacional FundamentosJorge A. Perez YebraAinda não há avaliações
- Tema5 Amplificadores OperacionalesDocumento25 páginasTema5 Amplificadores Operacionalesapi-27535945Ainda não há avaliações
- Filtros ActivosDocumento26 páginasFiltros Activosapi-2753594580% (5)
- Microsoft Word - Pract4Documento12 páginasMicrosoft Word - Pract4api-27535945Ainda não há avaliações
- Amplificadores LogarÍtmicos y AntilogarÍtmicosDocumento8 páginasAmplificadores LogarÍtmicos y AntilogarÍtmicosapi-27535945100% (2)
- Amplificadores OperacionalesDocumento14 páginasAmplificadores Operacionalesapi-27535945Ainda não há avaliações
- Bjtyfeta 3Documento18 páginasBjtyfeta 3api-27535945Ainda não há avaliações
- RtafrecDocumento43 páginasRtafrecbuyesyohanAinda não há avaliações
- Respuesta en Frecuencia de Los Circuitos AmplificadoresDocumento17 páginasRespuesta en Frecuencia de Los Circuitos Amplificadoresapi-27535945100% (1)
- Amplifica Operacional y TiristoresDocumento39 páginasAmplifica Operacional y Tiristoresapi-27535945100% (1)
- Codificador y DecodificadorDocumento2 páginasCodificador y DecodificadorMiguel VHAinda não há avaliações
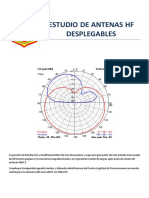
- Antenas HF DesplegablesDocumento29 páginasAntenas HF Desplegablesenrique50% (2)
- Revista AlexDocumento160 páginasRevista AlexMiguel Angel VillalbaAinda não há avaliações
- Emtronics 19Documento10 páginasEmtronics 19rouseAinda não há avaliações
- Clase 01 - El TiristorDocumento21 páginasClase 01 - El Tiristorjohn haileAinda não há avaliações
- Filtro SallenDocumento10 páginasFiltro SallenMiguel GonzálezAinda não há avaliações
- 3 - Tiras Led + Accesorios + OtrosDocumento33 páginas3 - Tiras Led + Accesorios + OtrosMauro Alejandro PereiraAinda não há avaliações
- Manuals90 Hilo MusicalDocumento23 páginasManuals90 Hilo MusicalSelgasa ElectricidadAinda não há avaliações
- Diferencia Diafonía IntermodulaciónDocumento5 páginasDiferencia Diafonía IntermodulaciónGonzalo Oscar FriasAinda não há avaliações
- Banco de PreguntasDocumento14 páginasBanco de PreguntasMichael LòpezAinda não há avaliações
- Programa Electronica GeneralDocumento2 páginasPrograma Electronica GeneralDavid RodríguezAinda não há avaliações
- Circuito Integrado 555 InvestigacionDocumento5 páginasCircuito Integrado 555 InvestigacionVargas AlvaroAinda não há avaliações
- Guia de Alineacion de Modems AxesstelDocumento20 páginasGuia de Alineacion de Modems Axesstelomarfernandez35100% (2)
- Procedimiento Transferencia Manual Planta ElectricaDocumento2 páginasProcedimiento Transferencia Manual Planta ElectricaHernan HerreraAinda não há avaliações
- Diodo PinDocumento12 páginasDiodo PinPiLiGonzalezAinda não há avaliações
- Matlab FiltrosDocumento23 páginasMatlab FiltrosGissela RomeroAinda não há avaliações
- Notebook Asus g551jk Cn271h 15.6 Led Intel Core I7 4710hq 2Documento2 páginasNotebook Asus g551jk Cn271h 15.6 Led Intel Core I7 4710hq 2JimmyCenturionAinda não há avaliações
- Practica Amplificador Operacional CompletoDocumento17 páginasPractica Amplificador Operacional CompletoCrisGonzaAinda não há avaliações
- Manual de Ensamblaje CEPS PDFDocumento244 páginasManual de Ensamblaje CEPS PDFKeytel Tarmeño QuispeAinda não há avaliações
- PSo CDocumento17 páginasPSo CErick Poumián PalomecAinda não há avaliações
- Filtrado de Señales AnalógicasDocumento211 páginasFiltrado de Señales Analógicasperro malandroAinda não há avaliações
- Compuerta Dac0808Documento5 páginasCompuerta Dac0808COBRACAN2208Ainda não há avaliações
- Mapa Conceptual de Las Diferentes Arquitectura de ComputadorasDocumento4 páginasMapa Conceptual de Las Diferentes Arquitectura de ComputadorasJose GutierrezAinda não há avaliações
- Fernandez Roman Luis SI02 TareaDocumento6 páginasFernandez Roman Luis SI02 TareaLuis Fernández RománAinda não há avaliações
- Pantalla de Cristal LíquidoDocumento9 páginasPantalla de Cristal LíquidoJavier JimmyAinda não há avaliações
- Tipos de Arquitectura de PCDocumento41 páginasTipos de Arquitectura de PCJeffrey De La Cruz100% (1)
- Guia Lab2Documento16 páginasGuia Lab2Luís David LDMAAinda não há avaliações
- 23 en 1 Examen ResueltoDocumento9 páginas23 en 1 Examen ResueltoNuria Rodiño MeisAinda não há avaliações