Você também pode gostar
- Objectives:: Design of Iir FiltersDocumento9 páginasObjectives:: Design of Iir FiltersItkalkarShaileshAinda não há avaliações
- Converter Fundamentals PDFDocumento99 páginasConverter Fundamentals PDFanon_22353964Ainda não há avaliações
- Introduction To Sigma Delta ConvertersDocumento72 páginasIntroduction To Sigma Delta Convertershjtseng1974100% (1)
- Signal Processing Final Project Report On Multirate Signal ProcessingDocumento9 páginasSignal Processing Final Project Report On Multirate Signal ProcessingDhruv HirparaAinda não há avaliações
- JpegDocumento28 páginasJpegSayem HasanAinda não há avaliações
- IIR Filters and Equalizers: R.C. MaherDocumento14 páginasIIR Filters and Equalizers: R.C. MaherSushma ChandrashekarAinda não há avaliações
- 16 IIR Filter DesignDocumento23 páginas16 IIR Filter DesignManisman ParidaAinda não há avaliações
- Aaic Dac NoteDocumento26 páginasAaic Dac NoteYamuna DeviAinda não há avaliações
- A Comparison of Dynamic Element Matching in DacsDocumento6 páginasA Comparison of Dynamic Element Matching in DacsNguyen Van ToanAinda não há avaliações
- 1.3 Sistem Digital Dan Komponen DigitalDocumento39 páginas1.3 Sistem Digital Dan Komponen DigitalandrizalpoliAinda não há avaliações
- Computer Organization & Architecture CS 204: Anil Kumar Sao, EECS, IIT Bhilai Anil@iitbhilai - Ac.inDocumento54 páginasComputer Organization & Architecture CS 204: Anil Kumar Sao, EECS, IIT Bhilai Anil@iitbhilai - Ac.inAyush KumarAinda não há avaliações
- F19 Sysc3006 Finalexam 1Documento13 páginasF19 Sysc3006 Finalexam 1FrostAinda não há avaliações
- EE423 Lecture 15 - Introduction To Digital FiltersDocumento50 páginasEE423 Lecture 15 - Introduction To Digital FiltersAqAinda não há avaliações
- Fir Imp DSPDocumento34 páginasFir Imp DSPkarthi27687Ainda não há avaliações
- DSP - TerminologiesDocumento14 páginasDSP - TerminologiesRicky JunioAinda não há avaliações
- Active Filter Design TechniquesDocumento18 páginasActive Filter Design Techniquesmaithuong85Ainda não há avaliações
- Dldlab6 justPreLabDocumento10 páginasDldlab6 justPreLabArfaat SanitaryAinda não há avaliações
- Supplement FIR FiltersDocumento32 páginasSupplement FIR FiltersSABHASACHI POBIAinda não há avaliações
- Deep Learning and NLPDocumento39 páginasDeep Learning and NLPDan ZhengAinda não há avaliações
- Animated Slides For ImplimentationDocumento15 páginasAnimated Slides For ImplimentationPraveen KumarAinda não há avaliações
- 4 (Lec 9)Documento23 páginas4 (Lec 9)A HahaAinda não há avaliações
- 9-Design IIR Filters UpdatedDocumento23 páginas9-Design IIR Filters Updatedfigob33370Ainda não há avaliações
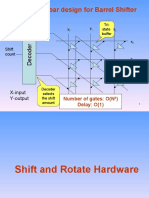
- NxN Crossbar design for Barrel ShifterDocumento18 páginasNxN Crossbar design for Barrel Shifterhamza abbasAinda não há avaliações
- ENTC 3320: Active FiltersDocumento60 páginasENTC 3320: Active FiltersMichael DineshAinda não há avaliações
- A Beginner's Guide To Cascaded Integrator-Comb (CIC) FiltersDocumento17 páginasA Beginner's Guide To Cascaded Integrator-Comb (CIC) FiltersAKHIL C SUNNYAinda não há avaliações
- Unit3 Iir Design Lecture NotesDocumento24 páginasUnit3 Iir Design Lecture NotesramuamtAinda não há avaliações
- Combinational Logic DesignDocumento39 páginasCombinational Logic DesignKuzivashe KudzeremaAinda não há avaliações
- 2nd Order ΣΔ Modulator Test QuestionsDocumento1 página2nd Order ΣΔ Modulator Test QuestionsHelder CruzAinda não há avaliações
- Chapter12 BodeDocumento40 páginasChapter12 BodeHassaan SiddiquiAinda não há avaliações
- Chapter 3-1 Scattering Matrix and Microwave NetworkDocumento32 páginasChapter 3-1 Scattering Matrix and Microwave NetworkKavita KamerikarAinda não há avaliações
- B3 IirDocumento39 páginasB3 Iirmaria reverteAinda não há avaliações
- A Bit-Serial Approximate Min-Sum LDPC Decoder and FPGA Implementation (presentation)Documento20 páginasA Bit-Serial Approximate Min-Sum LDPC Decoder and FPGA Implementation (presentation)Heekwan SonAinda não há avaliações
- Negative Resistance Oscillators: Ceramic Oscillator (CRO) Dielectric Oscillator (DRO)Documento50 páginasNegative Resistance Oscillators: Ceramic Oscillator (CRO) Dielectric Oscillator (DRO)megadaveAinda não há avaliações
- ECE 301 Digital Electronics Multiplexers Decoders EncodersDocumento37 páginasECE 301 Digital Electronics Multiplexers Decoders EncodersKishore Gurram100% (1)
- Chapter IIDocumento30 páginasChapter IISwarndevi KmAinda não há avaliações
- 8.1 Finite Word Length EffectsDocumento18 páginas8.1 Finite Word Length Effectsjyothi kumarAinda não há avaliações
- 8.1 Finite Word Length EffectsDocumento18 páginas8.1 Finite Word Length Effectsjyothi kumarAinda não há avaliações
- 8.1 Finite Word Length EffectsDocumento18 páginas8.1 Finite Word Length Effectsjyothi kumarAinda não há avaliações
- 8.1 Finite Word Length EffectsDocumento18 páginas8.1 Finite Word Length EffectsRajaMandapatiAinda não há avaliações
- 8.1 Finite Word Length EffectsDocumento18 páginas8.1 Finite Word Length Effectsjyothi kumarAinda não há avaliações
- ECE411 - 4c - The Z-Transform - Problem Set 1Documento2 páginasECE411 - 4c - The Z-Transform - Problem Set 1Martine JimenezAinda não há avaliações
- Chap 11Documento35 páginasChap 11GagneAinda não há avaliações
- ADC and DACDocumento54 páginasADC and DACM. D AdarshAinda não há avaliações
- Solution - Ass #2-ch 2 - s2016Documento3 páginasSolution - Ass #2-ch 2 - s2016Abigail EngleAinda não há avaliações
- From AM Radio To Digital I/Q ModulationDocumento57 páginasFrom AM Radio To Digital I/Q Modulationjtz00000Ainda não há avaliações
- From AM to Digital IQ: Introduction to Wireless Network ModulationDocumento53 páginasFrom AM to Digital IQ: Introduction to Wireless Network ModulationMaggiAinda não há avaliações
- Materi 5 - Channel Coding - Convolutional CodesDocumento20 páginasMateri 5 - Channel Coding - Convolutional CodesUta ZayYang KAmyuAinda não há avaliações
- Unit-5: Combinational Circuit: Multiplexers-De-multiplexers Decoder-EncoderDocumento22 páginasUnit-5: Combinational Circuit: Multiplexers-De-multiplexers Decoder-EncoderFaizan KhanAinda não há avaliações
- MICROELECTRONIC CIRCUITS AMPLIFIER BASICSDocumento58 páginasMICROELECTRONIC CIRCUITS AMPLIFIER BASICSsid011Ainda não há avaliações
- 11 Converter Fundamentals - Johns & Martin SlidesDocumento33 páginas11 Converter Fundamentals - Johns & Martin SlidesYuvraaj KumarAinda não há avaliações
- Lect 6Documento34 páginasLect 6Hermain KarimAinda não há avaliações
- Implementation of Basic Digital Filter Structures: R.C. MaherDocumento17 páginasImplementation of Basic Digital Filter Structures: R.C. Maherksreddy2002Ainda não há avaliações
- Digital Filter Design: Bilinear Transformation Method and Lowpass Filter DesignDocumento31 páginasDigital Filter Design: Bilinear Transformation Method and Lowpass Filter DesignAbhijit PatilAinda não há avaliações
- DSP Unit 3Documento89 páginasDSP Unit 3naveen goudAinda não há avaliações
- Lesson 03 - Minimizing Boolean Expressions - ADocumento84 páginasLesson 03 - Minimizing Boolean Expressions - Aekong1912Ainda não há avaliações
- Impulse Responses of Ideal FiltersDocumento25 páginasImpulse Responses of Ideal FiltersGhubaida HassaniAinda não há avaliações
- Code Generation Compiler ConstructionDocumento38 páginasCode Generation Compiler ConstructionIsaac BelloAinda não há avaliações
- Ch5-Dsp Design DFDocumento37 páginasCh5-Dsp Design DFtrucquynhtudoanAinda não há avaliações
- FResumeDocumento2 páginasFResumeapi-3826975Ainda não há avaliações
- FResumeDocumento2 páginasFResumeapi-3826975Ainda não há avaliações
- Curriculum Vitae2Documento3 páginasCurriculum Vitae2api-3826975Ainda não há avaliações
- Microprocessor InterfacingDocumento34 páginasMicroprocessor Interfacingapi-3826975Ainda não há avaliações
- dp3C 3Documento30 páginasdp3C 3api-3826975Ainda não há avaliações
- Curriculum VitaeDocumento3 páginasCurriculum Vitaeapi-3826975Ainda não há avaliações
- Curriculum VitaeDocumento3 páginasCurriculum Vitaeapi-3826975Ainda não há avaliações
- David Crawford EpsonDocumento31 páginasDavid Crawford Epsonapi-3826975Ainda não há avaliações
- Digital Signal Processing FundamentalsDocumento40 páginasDigital Signal Processing Fundamentalssitaram_1Ainda não há avaliações
- Accelerometer Localization PosterDocumento1 páginaAccelerometer Localization Posterapi-3826975Ainda não há avaliações
- 2-FFT-Based Power Spectrum EstimationDocumento30 páginas2-FFT-Based Power Spectrum Estimationapi-3826975Ainda não há avaliações
- MultimediaDocumento34 páginasMultimediaapi-3754471Ainda não há avaliações
- Experiments in MicroprocessorsDocumento133 páginasExperiments in Microprocessorsapi-3826975Ainda não há avaliações
- Journalslist June2014 PDFDocumento71 páginasJournalslist June2014 PDFhonexCBVAinda não há avaliações
- Finite Automata, Palindromes, Powers, and Patterns: Abstract. Given A Language L and A Nondeterministic Finite AutomatonDocumento12 páginasFinite Automata, Palindromes, Powers, and Patterns: Abstract. Given A Language L and A Nondeterministic Finite Automatonpolar necksonAinda não há avaliações
- MCNF AlgorithmsDocumento25 páginasMCNF AlgorithmsTimmyBurgsAinda não há avaliações
- Tos Grade 8Documento3 páginasTos Grade 8Martin BaccayAinda não há avaliações
- Brainware University: Practice Set ofDocumento4 páginasBrainware University: Practice Set ofDeep TarafdarAinda não há avaliações
- Sample Problems in Discrete Mathematics: 1 Using Mathematical InductionDocumento5 páginasSample Problems in Discrete Mathematics: 1 Using Mathematical InductionJie ChenAinda não há avaliações
- Basic Concept, Important Formulas and Shortcuts: Surds and IndicesDocumento4 páginasBasic Concept, Important Formulas and Shortcuts: Surds and IndicesSonam Yadav100% (1)
- Discrete Mathematics 1: Chapter 7: Advanced Counting TechniquesDocumento42 páginasDiscrete Mathematics 1: Chapter 7: Advanced Counting TechniquesMinh VuAinda não há avaliações
- Ae73 Information Theory & CodingDocumento20 páginasAe73 Information Theory & CodingSatyajit MukherjeeAinda não há avaliações
- Hints and Solution Binomial Theorem UyhgQkhDocumento69 páginasHints and Solution Binomial Theorem UyhgQkhRøyal Sujal SinhaAinda não há avaliações
- UntitledDocumento33 páginasUntitledMylene RiegoAinda não há avaliações
- RootsDocumento39 páginasRootsFitriani HanipahAinda não há avaliações
- Facebook - LeetCode PDFDocumento19 páginasFacebook - LeetCode PDFTuhin KunduAinda não há avaliações
- 2014 Korea InternationalDocumento11 páginas2014 Korea InternationalRefeniaUsmanAinda não há avaliações
- Chebyshev's Bias: Michael Rubinstein and Peter SarnakDocumento25 páginasChebyshev's Bias: Michael Rubinstein and Peter SarnakKaruzo PittAinda não há avaliações
- Halloween Activity CalculusDocumento3 páginasHalloween Activity CalculusZ0mb13MCAinda não há avaliações
- Block Diagram ReductionDocumento5 páginasBlock Diagram Reductionİsmail KayahanAinda não há avaliações
- Conversations On Greatest Common Divisor: Ashok PrasadDocumento5 páginasConversations On Greatest Common Divisor: Ashok PrasadVivek TonapiAinda não há avaliações
- Algebra IiDocumento2 páginasAlgebra IiFumiServi GuayaquilAinda não há avaliações
- Logs Express 5packDocumento10 páginasLogs Express 5packKevinRick B MalicdanAinda não há avaliações
- MCA Syllabus 2008 and RulesDocumento34 páginasMCA Syllabus 2008 and Rulessatya1401Ainda não há avaliações
- Sol 01Documento4 páginasSol 01adethroAinda não há avaliações
- FAL (2022-23) MAT1003 TH AP2022232000323 Reference Material I 09-Dec-2022 Module 6 LectureDocumento26 páginasFAL (2022-23) MAT1003 TH AP2022232000323 Reference Material I 09-Dec-2022 Module 6 LectureNithin ShankarAinda não há avaliações
- 1 - Primitive Data Types (2019) - 2Documento50 páginas1 - Primitive Data Types (2019) - 2Mathew HethrewAinda não há avaliações
- A Search Algorithm - WikipediaDocumento11 páginasA Search Algorithm - WikipediaVarun IraniAinda não há avaliações
- ASCII & Unicode + Binary AdditionDocumento8 páginasASCII & Unicode + Binary AdditionhackzidenAinda não há avaliações
- Cmath Header FileDocumento13 páginasCmath Header FileCode Seekers100% (1)
- Final SSR Cs 2010Documento289 páginasFinal SSR Cs 2010saran200579Ainda não há avaliações
- Binary Multiplier - VHDLDocumento4 páginasBinary Multiplier - VHDLziko karimAinda não há avaliações
- Form 4 Additional Math Functions ExercisesDocumento4 páginasForm 4 Additional Math Functions ExercisesRaymondAinda não há avaliações