Você também pode gostar
- The Yellow House: A Memoir (2019 National Book Award Winner)No EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Nota: 4 de 5 estrelas4/5 (98)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeNo EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeNota: 4 de 5 estrelas4/5 (5795)
- Never Split the Difference: Negotiating As If Your Life Depended On ItNo EverandNever Split the Difference: Negotiating As If Your Life Depended On ItNota: 4.5 de 5 estrelas4.5/5 (838)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceNo EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceNota: 4 de 5 estrelas4/5 (895)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersNo EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersNota: 4.5 de 5 estrelas4.5/5 (345)
- The Little Book of Hygge: Danish Secrets to Happy LivingNo EverandThe Little Book of Hygge: Danish Secrets to Happy LivingNota: 3.5 de 5 estrelas3.5/5 (400)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureNo EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureNota: 4.5 de 5 estrelas4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryNo EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryNota: 3.5 de 5 estrelas3.5/5 (231)
- The Emperor of All Maladies: A Biography of CancerNo EverandThe Emperor of All Maladies: A Biography of CancerNota: 4.5 de 5 estrelas4.5/5 (271)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaNo EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaNota: 4.5 de 5 estrelas4.5/5 (266)
- The Unwinding: An Inner History of the New AmericaNo EverandThe Unwinding: An Inner History of the New AmericaNota: 4 de 5 estrelas4/5 (45)
- Team of Rivals: The Political Genius of Abraham LincolnNo EverandTeam of Rivals: The Political Genius of Abraham LincolnNota: 4.5 de 5 estrelas4.5/5 (234)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyNo EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyNota: 3.5 de 5 estrelas3.5/5 (2259)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreNo EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreNota: 4 de 5 estrelas4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)No EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Nota: 4.5 de 5 estrelas4.5/5 (121)
- HLX 150Documento44 páginasHLX 150menendez2050100% (1)
- Basic Pneumatic System ApplicationsDocumento33 páginasBasic Pneumatic System Applicationsnarkuys syukranAinda não há avaliações
- GTO SampleDocumento24 páginasGTO Samplego25101992Ainda não há avaliações
- TM-FTKC-Manual User PDFDocumento72 páginasTM-FTKC-Manual User PDFnvn87100% (1)
- Operation of PumpsDocumento25 páginasOperation of PumpsPrajval ChauhanAinda não há avaliações
- Iroll 65: Design Iguzzini IguzziniDocumento2 páginasIroll 65: Design Iguzzini IguzziniSyahda Azmi OktariAinda não há avaliações
- ZERI PavillionDocumento10 páginasZERI Pavillionquangtung07Ainda não há avaliações
- Gf868 Startup Guide Revf1Documento80 páginasGf868 Startup Guide Revf1prihartono_diasAinda não há avaliações
- Flygt - Minicas IIDocumento4 páginasFlygt - Minicas IItrintxiAinda não há avaliações
- TFH220AEn112 PDFDocumento4 páginasTFH220AEn112 PDFJoseph BoshehAinda não há avaliações
- EnDocumento234 páginasEnAliTronic19720% (1)
- S29 PDFDocumento284 páginasS29 PDFPawan Shyamsundar GadewadAinda não há avaliações
- NEMA Full Voltage Starters: Fast Shipment Program Cat. Nos. Are Printed inDocumento4 páginasNEMA Full Voltage Starters: Fast Shipment Program Cat. Nos. Are Printed insoayAinda não há avaliações
- Ncert Chemistry PDFDocumento3 páginasNcert Chemistry PDFDinesh Singh PanwarAinda não há avaliações
- Tratat de Istorie A ReligiilorDocumento25 páginasTratat de Istorie A ReligiiloredymicAinda não há avaliações
- Painting ScheduleDocumento3 páginasPainting SchedulewaqasAinda não há avaliações
- Replacing SGDH in Field W MP940Documento3 páginasReplacing SGDH in Field W MP940jroyal692974Ainda não há avaliações
- Xcell 94Documento64 páginasXcell 94Eugen SpiritDivinAinda não há avaliações
- T HR Ci 12040 ST PDFDocumento33 páginasT HR Ci 12040 ST PDFtaarak143Ainda não há avaliações
- ALIYU, Muhammad Aminu: AddressDocumento2 páginasALIYU, Muhammad Aminu: AddressAliyu AbdulqadirAinda não há avaliações
- 8.2 Pmr-30 and Pmr-100 Platform RockersDocumento3 páginas8.2 Pmr-30 and Pmr-100 Platform RockerspalyzzAinda não há avaliações
- Stainless Steel in The Food Industry PDFDocumento26 páginasStainless Steel in The Food Industry PDFAnonymous jW9BkgbQmEAinda não há avaliações
- 60kg RailDocumento1 página60kg RailbulganinAinda não há avaliações
- Catridges ValvesDocumento316 páginasCatridges ValvesSamad A Bakar100% (1)
- BE - YST - Res - Steam Turbine Chillers PDFDocumento4 páginasBE - YST - Res - Steam Turbine Chillers PDFlkjdjkAinda não há avaliações
- Installation Guide 12kWGEN+6kWSUN (Edition EN)Documento12 páginasInstallation Guide 12kWGEN+6kWSUN (Edition EN)beqsAinda não há avaliações
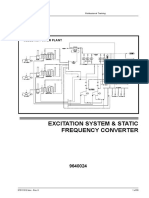
- Excitation Sys & SFCDocumento55 páginasExcitation Sys & SFCABVSAI100% (1)
- Design, Engineering, Procurement and Construction of Tanks Works Kjo-South Area Safety Related Facilities (Sasrf) Site Organization ChartDocumento1 páginaDesign, Engineering, Procurement and Construction of Tanks Works Kjo-South Area Safety Related Facilities (Sasrf) Site Organization ChartMuhammad ZubairAinda não há avaliações
- Nordson EFD 615DT 626DT Operating ManualDocumento16 páginasNordson EFD 615DT 626DT Operating Manualneri_colin3770Ainda não há avaliações
- Design and Implementa Ion of 16-Bit Fixed Point Digital Signal ProcessorDocumento4 páginasDesign and Implementa Ion of 16-Bit Fixed Point Digital Signal ProcessorShaaheer SkAinda não há avaliações