Você também pode gostar
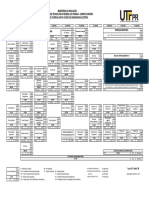
- Matriz Curricular UTFPR Eng. ElétricaDocumento2 páginasMatriz Curricular UTFPR Eng. ElétricaJonas Eduardo SilvaAinda não há avaliações
- Apostila - Banco de Dados FirebirdDocumento15 páginasApostila - Banco de Dados FirebirdFelipe Dias X Suelen NevesAinda não há avaliações
- 1 Arquivo - Classic TDocumento2 páginas1 Arquivo - Classic TEstênio Xavier VarjãoAinda não há avaliações
- PROJETO E TESTES EXPERIMENTAIS DE UM REGULADOR DE VELOCIDADE BASEADO EM LEI DE CONTROLE PID DE ORDEM FRACIONÁRIA. (Versão - Ebah) PDFDocumento64 páginasPROJETO E TESTES EXPERIMENTAIS DE UM REGULADOR DE VELOCIDADE BASEADO EM LEI DE CONTROLE PID DE ORDEM FRACIONÁRIA. (Versão - Ebah) PDF123tupanAinda não há avaliações
- Apostila Som AutomotivoDocumento76 páginasApostila Som AutomotivoGleison NevesAinda não há avaliações
- Manual F One Philips D 205Documento42 páginasManual F One Philips D 205Luiz RoqueAinda não há avaliações
- Esquema de Ligacao Off Grid ES Rev1.2Documento1 páginaEsquema de Ligacao Off Grid ES Rev1.2Dionei ArcaroAinda não há avaliações
- Diagrama Eletrico OmegaDocumento212 páginasDiagrama Eletrico OmegaLuiz Carlos BocalonAinda não há avaliações
- Regras Técnicas Das Instalações Eléctricas - Baixa TrensãoDocumento19 páginasRegras Técnicas Das Instalações Eléctricas - Baixa Trensãobchavesdias100% (1)
- TDG 415 Ed BambozziDocumento10 páginasTDG 415 Ed BambozziReimaq ManutencaoAinda não há avaliações
- DIAGRAMA ELET V8L Caminhos Da Escola PDFDocumento33 páginasDIAGRAMA ELET V8L Caminhos Da Escola PDFCledir Boeck100% (1)
- Multijogos Caseira 30 04 08Documento29 páginasMultijogos Caseira 30 04 08maysomAinda não há avaliações
- MRTV - 350 - Junho - 1977Documento91 páginasMRTV - 350 - Junho - 1977asccorreaAinda não há avaliações
- Relatorio MotorDCDocumento7 páginasRelatorio MotorDCMaay ChanAinda não há avaliações
- Teste de Ferramentas Comunicação 8º AnoDocumento5 páginasTeste de Ferramentas Comunicação 8º AnoDulce Soveral0% (1)
- Aula Motores Síncronos - Circuito Equivalente, Regulação, EtcDocumento51 páginasAula Motores Síncronos - Circuito Equivalente, Regulação, EtcDircSoarAinda não há avaliações
- Indicador 8540 (Analogico - 3474192) - Revisão 02.05.2006Documento34 páginasIndicador 8540 (Analogico - 3474192) - Revisão 02.05.2006Kadson Amaral100% (1)
- TV Philips14pt3131 14pt4131 Chassis L03.1L AaDocumento65 páginasTV Philips14pt3131 14pt4131 Chassis L03.1L AadantenicolaAinda não há avaliações
- NOTAS DE AULA PROFESSOR ANGELO ANTONIO LEITHOLD Banco de Dados Atualizado Mapa Do Site - Py5aal Angelo LeitholdDocumento8 páginasNOTAS DE AULA PROFESSOR ANGELO ANTONIO LEITHOLD Banco de Dados Atualizado Mapa Do Site - Py5aal Angelo LeitholdANGELO ANTONIO LEITHOLDAinda não há avaliações
- Apostila Capítulo 7 - Questões 1 e 2Documento3 páginasApostila Capítulo 7 - Questões 1 e 2Giliardi Soler VeigaAinda não há avaliações
- Catalogos WAGO 006Documento204 páginasCatalogos WAGO 006bisoniAinda não há avaliações
- Catálogo WEG AcionamentosDocumento8 páginasCatálogo WEG AcionamentosedicmlimaAinda não há avaliações
- Catalogo ProtecoDocumento3 páginasCatalogo ProtecoRoger SantosAinda não há avaliações
- Apresentação SDAIDocumento29 páginasApresentação SDAIfaelzudoAinda não há avaliações
- Laudo Bebedouro PDFDocumento3 páginasLaudo Bebedouro PDFracalvesAinda não há avaliações
- AOC L32W831 Dicas de Reparação - Defeitos - Avarias (Pag. 1 - 2)Documento6 páginasAOC L32W831 Dicas de Reparação - Defeitos - Avarias (Pag. 1 - 2)Wellington NonatoAinda não há avaliações
- WEG Chaves de PartidaDocumento20 páginasWEG Chaves de PartidaRonaldo TorresAinda não há avaliações
- Transformador de Corrente (TC) - Mundo Da ElétricaDocumento8 páginasTransformador de Corrente (TC) - Mundo Da ElétricaRenan Serafim MirandaAinda não há avaliações
- Catalogo Conectores EFBDocumento76 páginasCatalogo Conectores EFBgiovanipifferAinda não há avaliações
- Motor BrushlessDocumento23 páginasMotor BrushlessMoise CristinaAinda não há avaliações