Você também pode gostar
- 1759 16Documento2 páginas1759 16Lincoln Luiz CorrêaAinda não há avaliações
- Licoesqueavidaensina PDFDocumento21 páginasLicoesqueavidaensina PDFLincoln Luiz CorrêaAinda não há avaliações
- Laboratório de Metrologia Dimensional Pertencente À Rede Brasileira de CalibraçãoDocumento1 páginaLaboratório de Metrologia Dimensional Pertencente À Rede Brasileira de CalibraçãoLincoln Luiz CorrêaAinda não há avaliações
- Laboratório de Metrologia Dimensional Pertencente À Rede Brasileira de CalibraçãoDocumento1 páginaLaboratório de Metrologia Dimensional Pertencente À Rede Brasileira de CalibraçãoLincoln Luiz CorrêaAinda não há avaliações
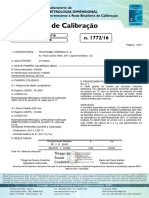
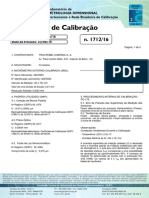
- 1772 16Documento1 página1772 16Lincoln Luiz CorrêaAinda não há avaliações
- 1759 16Documento2 páginas1759 16Lincoln Luiz CorrêaAinda não há avaliações
- Laboratório de Metrologia Dimensional Pertencente À Rede Brasileira de CalibraçãoDocumento1 páginaLaboratório de Metrologia Dimensional Pertencente À Rede Brasileira de CalibraçãoLincoln Luiz CorrêaAinda não há avaliações
- 1772 16Documento1 página1772 16Lincoln Luiz CorrêaAinda não há avaliações
- 1772 16Documento1 página1772 16Lincoln Luiz CorrêaAinda não há avaliações
- Laboratório de Metrologia Dimensional Pertencente À Rede Brasileira de CalibraçãoDocumento1 páginaLaboratório de Metrologia Dimensional Pertencente À Rede Brasileira de CalibraçãoLincoln Luiz CorrêaAinda não há avaliações
- Laboratório de Metrologia Dimensional Pertencente À Rede Brasileira de CalibraçãoDocumento1 páginaLaboratório de Metrologia Dimensional Pertencente À Rede Brasileira de CalibraçãoLincoln Luiz CorrêaAinda não há avaliações
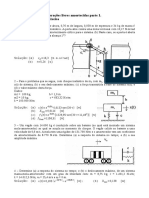
- Exercicios 3 PDFDocumento1 páginaExercicios 3 PDFLincoln Luiz CorrêaAinda não há avaliações
- 1772 16Documento1 página1772 16Lincoln Luiz CorrêaAinda não há avaliações
- Laboratório de Metrologia Dimensional Pertencente À Rede Brasileira de CalibraçãoDocumento1 páginaLaboratório de Metrologia Dimensional Pertencente À Rede Brasileira de CalibraçãoLincoln Luiz CorrêaAinda não há avaliações
- Manutenção FerroDocumento208 páginasManutenção FerroyasaffAinda não há avaliações
- DashDocumento3 páginasDashLincoln Luiz CorrêaAinda não há avaliações
- 1712 16Documento2 páginas1712 16Lincoln Luiz CorrêaAinda não há avaliações
- Material TLDocumento20 páginasMaterial TLLincoln Luiz CorrêaAinda não há avaliações
- Lista 04Documento1 páginaLista 04Lincoln Luiz CorrêaAinda não há avaliações
- TCC Análise de Vibrações em Rolamentos Pico A Pico X EnvelopeDocumento25 páginasTCC Análise de Vibrações em Rolamentos Pico A Pico X EnvelopeFabinho GarciaAinda não há avaliações
- Contrato Adesao ImobiliarioDocumento36 páginasContrato Adesao ImobiliarioLincoln Luiz CorrêaAinda não há avaliações
- Apostila Sobre Cames PDFDocumento32 páginasApostila Sobre Cames PDFLuis Fernando ColleAinda não há avaliações
- Quipamentos Utilizados Nas Empresas de Beneficiamento de Mármore e GranitoDocumento7 páginasQuipamentos Utilizados Nas Empresas de Beneficiamento de Mármore e GranitoPedro MendesAinda não há avaliações
- FmecaDocumento19 páginasFmecaEverton MonteiroAinda não há avaliações
- Lista 07Documento1 páginaLista 07Lincoln Luiz CorrêaAinda não há avaliações
- Lista 06Documento2 páginasLista 06Lincoln Luiz CorrêaAinda não há avaliações
- Lista 02Documento2 páginasLista 02Lincoln Luiz CorrêaAinda não há avaliações
- Respostas 02Documento2 páginasRespostas 02Lincoln Luiz CorrêaAinda não há avaliações
- Lista 05Documento2 páginasLista 05Lincoln Luiz CorrêaAinda não há avaliações