Escolar Documentos
Profissional Documentos
Cultura Documentos
Mecatrônica Fácil Edição 3 PDF
Enviado por
Lucio Oliveira0 notas0% acharam este documento útil (0 voto)
127 visualizações63 páginasRevista para iniciantes em mecatrônica e eletrônica. Projetos simples e práticos, ideais para aprendizagem.
Aprenda eletrônica mecânica robótica e programação na prática.
Título original
Mecatrônica Fácil Edição 3.pdf
Direitos autorais
© © All Rights Reserved
Formatos disponíveis
PDF ou leia online no Scribd
Compartilhar este documento
Compartilhar ou incorporar documento
Você considera este documento útil?
Este conteúdo é inapropriado?
Denunciar este documentoRevista para iniciantes em mecatrônica e eletrônica. Projetos simples e práticos, ideais para aprendizagem.
Aprenda eletrônica mecânica robótica e programação na prática.
Direitos autorais:
© All Rights Reserved
Formatos disponíveis
Baixe no formato PDF ou leia online no Scribd
0 notas0% acharam este documento útil (0 voto)
127 visualizações63 páginasMecatrônica Fácil Edição 3 PDF
Enviado por
Lucio OliveiraRevista para iniciantes em mecatrônica e eletrônica. Projetos simples e práticos, ideais para aprendizagem.
Aprenda eletrônica mecânica robótica e programação na prática.
Direitos autorais:
© All Rights Reserved
Formatos disponíveis
Baixe no formato PDF ou leia online no Scribd
Você está na página 1de 63
Editora Saber Ltda.
Diretores
Hélio Fittipaldi
‘Thereza M. Ciampi Fittipaldi
MEO
Mecatrénica Facil
Editor ¢ Diretor Responsivet
Hisio Fitpalat
Editor Ascistente
Paulo Gomes das Santos
Publicidade
Eduardo Anion - Gerente
Ricardo Nunes Souza
Conselho Ealtoriat
Alexandre Capelli
‘Julano Matias
Newton C. Braga
Colaboradores
Ettore Barros.
José Garlos Amadeo
‘José France! Junior
Luis Henrique C. Bernardes
Newton C. Braga
(etivio Nogueira
Agradecimentos
Edacom Tecnologia
Impressao
w.Bth
Distribuieao.
Baal: DINAP
Portugal: Electrliber
MECATRONICA FACIL
(SSN - 1676-0980) € uma
‘publicagéo da Edtora Saber Lida
Redaeao, adminstragso, numeros
atrasados, publiciade o corres-
ondenci:
R. Jacinto José de Aratjo, 315
CEP: 03087-020 - Sa0 Paulo
SP Brel
Tel.: (11) 296-5333
6192-4700
Empresa proprielaria dos dicitos
{do raprodugto:
EDITORA SABER LTDA.
Associada da ANER - Associa-
{Gao Nacional dos Eitores de
Revistas © da ANATEC -
Associagda Nacionel das Editoras
de Publicagbes Técnicas,
Dirgidas ¢ Espociaizadas,
‘Tiragem: 30.000 exemplares
FA TArTH
www anatee.ong.be
EDITORIAL
Nesta edigéio trazemos até voc uma maté-
ria sobre 0 kit 9790 Robolab, da LEGO Dacta.
Este kit vem sendo adotado em um numero
cada vez maior de escolas que desejam
implementar a Mecatronica em seus cursos.
Isto porque se trata de um material extrema-
mente versatil e muito fécil de utilizar. Versatt,
pois com ele € possivel construir diversos ti-
os de robés diferentes, capazes de realizar as mais variadas agdes. Isto
porque, além das tradicionais pecas de LEGO, ele conta com diversas ou-
tras pecas tais como polias, engrenagens, rodas, esteiras, mangueiras, mo-
tores, sensores, além do cérebro, 0 tijolo RCX, onde sdo armazenados os
programas que orientarao 0 robé
Além de versatil, 0 kité facil de usar, pois além de contar com um manual
contendo as instrugées basicas para a montagem de algumas estruturas, o
software para a programagao é extremamente amigavel, pois é totalmente
visual
© prego do kitnéo é muito acessivel, sendo mais viével para as institu
Ses que desejem aplica-lo em treinamentos, Por outro lado, achamos que
seria bom que 05 leitores ao menos o conhecessem e tivessem uma idéia
do que ele € capaz de fazer. Desta forma, aqui esta o artigo sobre o LEGO
Dacta. Espero que apreciem e se nao for possivel & maioria das pessoas
‘adquiri-lo, que pelo menos as instituicBes de ensino descubram o seu valor e
passem a adoté-lo em seus cursos, mesmo que estes nao contemplem dire-
tamenie a MecatrOnica, pois o kit pode perfeitamente servir para tratar, por
exemplo, de varios temas da Fisica, tais como o principio da alavanca, 0
momento angular, torque, a conservacao de energia e de momento, entre
muitos outros. Isto tudo através de uma forma liidica, que vem mostrando
ser uma forma de aprendizado muito rica e eficiente em qualquer disciplina.
Continuamos recebendo centenas de e-mails nos prestigiando e contri-
buindo para a melhora das nossas publicag6es. Infelizmente, nao é possivel
Publicar todos na revista, mas procuramos escolher aqueles que trazem co-
mentérios que possam servir ao maior nimero de pessoas. A seeao do leitor
deste més, portanto, est4 muito rica, e esperamos continuar recebendo todo
esse apoio da parte dos nossos leitores.
Nesta edicao vocé notaré que nado ha mais a pesquisa, mas pode conti-
nuar mandando as suas sugestées, comentarios e criticas por carta ou e-
mail, que nos esforcaremos a0 maximo para tornar esta revista cada vez
melhor.
Paulo Gomes dos Santos
Een onueeees encod
(Os anigos assinacos so de exclusiva responsabidade do sous alors, = vedas 2 rapradido otal ou parca os
txtoselstragbes testa Revista, Ber come a industs2ara0 elu comarcalizaras os aparelice ou ein Oru.
‘des cos textos mencionados, sob pena de sangtes ogais Sao torados lado oc euldtesrazodvais nia prepararso
‘do conte desta Revista, mas ndo assumimos a esponsahildade legal por vontuais ese. Caso haja mganas em
texto ou desenho, seri publcada erata na primeira sperunidade.Pregos e dads publcados om anncos 640 por
és sosios de boa 16, como cometos na data do fechamento da exi¢de. No assuminos 2 rosporsablidads por
alleges nos precas & na sponded dos Produtos ccoredas apés ofechameno.
N2 3 - MARCO/2002 i
INDICE
|Segao do Leitor 3
Noticias 7
Construindo um Rob6
com o LEGO Dacta
© objetivo deste artigo é mostrar, em li-
nhas gerais, como funciona o kit 9790
Robolab, da LEGO Dacta, construindo um rob}
capaz de deteciar um obstaculo através de
suas antenas e desviar-se do mesmo.
Robés Moveis Aut6nomos
Imagine robés com meios préprios de
locomogao, sensores @ computagao
embarcada que sao projetados para realizar
suas tarefas dispensando a intervengao ou
supervisado humana, e sem que tals taretas
estejam explicitamente programadas. Nes-
te artigo, o autor aborda a evolucao e a es-
trutura dos robés méveis autonomos, 0 que
constitui a drea mais desafiadora da pes-
quisa em Inteligéncia Artifical.
Os Servos
(Os servos sfo encontrados em diversas
aplicagdes que envolvem controle eletréni-
co de movimentos. Aqui o autor analisa o
funcionamento dos servos (servomotores)
e da algumas informagdes para a elabora-
go de projetos préticos com finalidade
2
9
7
4
cl
Bi6nica — A Eletrénica Imita
aVida
A Biénica 6 a ciéncia que procura criar
equipamentos que imitem formas vivas. As
rmarevilhas da tecnologia que so geradas pelo
homem e a que @ Natuteza jé usa ha milhoes
Coletando Sinais pela
Porta Paralela
Esta é a 3° parte da série “Linguagem
LOGO para Robética e Automacao”, onde 0
autor mostra como utilizar essa linguagem
para manusear as entradas da porta parale-
[2a fim de realizar uma série de automacées oO
A Teoria do Ar Comprimido
Neste artigo, que é a 3° parte da série
‘Automagao Preumética”, 6 tratada em
maior profundidade a teoria do ar comprimi
do. S40 apresentadas mais algumas carac-
teristicas da nossa atmosfera e sdo tam-
bém discutidas a importancia da qualidade
do ar comprimido, bem como quais as pro-
priedades que garantem essa qualidade.
Trabalhando com
Plasticos — 2? parte
Este artigo continua dando uma série de
“dicas’ aos leitores que desejam aprender a
trabalhar com plésticos para incrementar 0s
‘seus projetos de Mecatronica. Aqui é abor-
dado como fazer um corte redondo, tanto
interno como externo, @ também como fa-
zer curvas e dobras com 0 plastic. J
[Gatica ou experimental ) Os transistores como
Basic Step — 1? parte
Esta série de artigos ird apresenté-lo a
um dos microcontroladores mais faceis de
utilizar, 0 BASIC Step 1. Ele 6 um conjunto
sofisticado de componentes eletrénicos,
montado em uma pequena placa, podendo
ser programado para executar praticamente
qualquer tipo de automagao e controle ne-
cessarios nos dias de hoje.
30
chaves
Os semicondutores de poténcia sao uma
solugao importante para 0 controle de dis-
positivos elétricos que produzem fora. Nes-
te artigo, que € a terceira parte da série “Ele-
trénica Basica para Mecatronica”, é aborda-
do 0 uso de transistores bipolares ¢ FETs
no controle de motores e outras cargas de
corrente continua que possam ser utiliza~
das nos projetos de Mecatrénica. J
4
4
6
2
5
Sec3o
d Q
7 Leitot ‘
v1
Olé, primeiramente gostaria de parabenizé-los pela Revista e por ensi=
narem a fazer um carrinho mais fécil, desta vez
Estou enviando uma foto do VM-1 consiruido por mim. © seu chassi
e carenagem foram feitos de arame. Na verdade, toda sua estrutura é
de arame, as rodas eu tirei de um carrinho de brinquedo disponivel, e
ele foi coberto por papel-manteiga. Tudo isso para deixa-lo bem leve.
Eu nao consegui comprar a ponte de terminais e por isso tive que
usar apenas
solda.
Sua eficien-
cia foi compro-
vada numa mi-
nicorrida que |
promovemos
entre trés carri-
nhos, onde os
demais foram
feitos nos mol-
des aconselha-
dos pela Revis-
tae o mou car-
rinho foi o ven-
ccedor, deixando 0s outros bem distantes, pois ¢ um carro muito leve feito
de arame e papel-manteiga
Gostaria de agradecer a vocés da revista Mecatrénica Facil por dar a
todos os leitores essa oportunidade.
Obrigado pela atenedo, Felipe Mansoldo.
Caro Felipe,
Nos 6 que agradecemos pelo apoio e incentivo. Estamos publicando a
foie do seu protétipo para que os leltores tenham mais uma opgao de
montagem. Procuramos estimular os leitores a buscar solugdes diferen-
tes para as montagens mostradas nas revistas, pois sabemos da dificul-
dade em encontrar materials para a construgdo dos protétipos. Parabéns!
MECATRONICA FACIL N° 3 - MARGO/2002
- SECAO DO LEITOR
Projetos de Leitores
e Eventos de
Mecatrénica
Meu nome é Flavio Dalpino e
sou leitor assiduo da Revista Sa-
ber Eletronica ha alguns anos, ¢
agora da Mecatrénica Atual. Gos-
taria de sugerir para uma futura
edigao da revista Mecatrénica
Atual que fossem publicadas fo-
tos de robos desenvolvidos pe-
los Ieitores, assim como voces
publicam dicas e circuitos na Sa-
ber Eletronica
Minha segunda sugestao se-
fia a propria divulgacéo de uma
competicao de Robotica ou por-
que ndo apenas uma “feira’” de di-
‘vulgacéo? Isso dé oportunidades
a outras pessoas e nao somente
a alunos de Universidades, que
provavelmente ndo séo nem 1%
dos leitores das revistas. Obriga-
do por sua atenoao,
Flavio Dalpino
Prezado Flavio,
O espago est aberto para os
leitores que quiserem mandar fo-
tos dos seus robés. Dependendo
do projeto, ele pode até se trans-
formar num artigo. Quanto aos
eventos, procuraremos divulgé-
los na medida que consigamos as
informagées. Fique atento as nos-
sas edi¢des e também ao nosso
site(http: www.mecatronica-
facil.com.br).
Beene)
TR TS TTT
Guerra de Robés
Prezados Senhores,
Gostaria de parabenizé-os pela iniciativa de publi
‘car as revistas “Mecatrénica Atual” e “Mecatréonica Fax
cil". Creio que essas revistas serao de grande valia
ras salas de aula, ajudando na escoiha e execugaio de
projetos, sejam eles nas Universidades ou nas Esco-
las Secundarias.
Porém, sinto-me obrigado a fazer uma critica: Na
edic&o anterior vocés publicaram uma matéria especi-
al intitulada “Guerra de Robés’ que me deixou um tan-
to preocupado. Robés deveriam ser usados principal-
mente para auxiliar 0 homem e para executar tarefas
insalubres, perigosas ou aquelas que ele nao poderia
executar. Assim, competicdes do tipo “combates de
robés” deveriam ser repudiadas por todas as pessoas
que trabalham com o ensino ou a divulgagao de as-
suntos relacionados & Robética, Em um passado nao
muito distante, esse tipo de competigao era mais di-
fundido, mas ao perceberem a barbarie que ela repre-
senta, muitos competidores passaram a procurar ou-
tros modos decompeticao, muito mais pacificos, sau-
daveis @ inteligentes, tais como 0 futebol de robés, as
competicdes do tipo “enduro” ou o ‘rally de regularida-
de’, onde os participantes tém a oportunidade de tes-
tar seus conhecimentos em estratégias de controle,
sensoriamento, navegacao e projetos, por exemplo.
Deve-se lembrar que, apesar de nao existir uma defini-
do rigida para robés, eles podem ser definidos como
maquinas que so capazes de obter informagdes so-
bre o ambiente ao seu redor ¢ sobre si préprios, atuan-
do nesse ambiente de alguma forma (manipulando
objetos ou movendo-se, por exemplo). Onde estao in-
cluidas estas caracteristicas em uma “guerra” de ro-
és controlados por radio? Sao apenas “carrinhos de
controle remoto” com capacidade de destruicao, bem
diferentes dos robés teleoperados conhecidos, que pos-
‘suem todo um suporte sensorial e estratégias de con-
tole bem elaboradas,
Espero que as préximas matérias tratem 0s rob0s
com “mais respeito”, incentivando os jovens a realiza-
rem projets e competi¢des valorizando princisalmen-
te a paz e a real utlidade dessas maquinas que tanto
nos fascinam. Muito obrigado e, mais uma vez, para-
béns pela idéia dessas Revistas.
Fransérgio Leite da Cunha, Msc.
Caro Franséigio,
De fato, existem muitas controvérsias a respeito
do termo robé e a definigdo que vocd nos apresentou 6
bastante pertinente, tanto que acreditamos ser a mais
aceita.
Concordamas que, 4 primeira vista, 0 termo Guerra
€ muito forte e parece incentivar a violéncia, mas ana-
lisando-se por outro lado, perceberemos que se refere
a uma competicao sem quaisquer danos para 0 ser
humano ou para 0 meio ambiente @ apesar de nao se
tratar de maquinas tdo sofisticadas quanto outras dis-
putas com robds auténomos, esse tipo de competi-
‘9a0 tem se mostrado bastante eficiente no desenvol-
vimento das habilidades de seus montadores, que
podem ser utilizadas em outros projetos. E preciso
levar em conta também que essa facilidade promove
‘@ popularizacdo da Mecatrénica, visto que é mais sim-
ples construir uma maquina radiocontrolada (que po-
demos ludicamente chamar de rob6) do que um 1ob6
auténomo, Aereoitamos que muitas pessoas que hoje
constrdem maquinas sofisticadas, passaram anteri-
‘ormente pelo rédiocontrole.
Logo, 6 muito importante compartilhar com os lei-
tores estes pontos de vista diferentes, uma vez que
queremos contribuir néo apenas com a formagao téc-
nica dos nossos leitores mas também com a sua for-
mago critica. Todos os tipos de competicées tém as
suas vantagens e desvantagens. Nossa obrigagao 6
procurar divulgar os rumos pelos quais a Mecatronica
vem se desenvolvendo no pais.
‘Aqui quem vos escreve é 0 engenheiro eletrénico
Roberto Mathias, sou formado pela PUC-RS, pés-gra-
duado em Fisica e espacialista em Robética pela
UFRGS. Atualmente sou professor das disciplinas de
EletrOnica Digital e Eletrénica Anal6gica no Curso de
Informatica Industrial e EletrOnica da FUNTEL (Fun-
‘dago do Ensino Técnico de Londrina) e tenho um Clube
de Robotica (Didaki Robotics Competition) onde tra-
balho conceitos de Fisica, Mecanica e Programac&o,
Logo com criangas a pattir de nove anos, e também
com alunos de engenharia da UNOPAR. Li a reporta-
gem sobre a Batalha de Robés @ achei muito interes-
sante, pois ¢ justamente o trabalho que fazemos aqui,
em Londrina ha dois anos. A nossa primeira batalha
de robés ocorreu no gindsio IPOLON, no dia 1° de
setembro de 2001, a qual foi documentada pela Glo-
bo nos Jornais do meio dia e & noite. A segunda bata-
Iha foi realizada no Shopping Catuai (maior shopping
do norte do Parana), no dia 22 de dezembro de 2001.
Atenciosamente,
Eng. Roberto.
Caro Roberto,
Ceriamente a idéia de duelo entre robds deve ser
#40 antiga quanto o préprio surgimento dos rob6s no
Brasil. Este tipo de evento vem se popularizando mui-
10 rapidamente, apesar de continuarem, na maioria das,
vezes, atrelados a escolas e outras instituigdes de
ensino. A tendéncia porém, 6 que estas competicées
passem a ser organizadas também por grupos de
robotica que vem surgindo em varias partes do pais
aa el
MECATRONICA FACIL N’ s - MARCO/2002
SECAO DO LEITOR
Minha experiéncia
Ola pessoal, me interes-
sei em comprar a edicao de
dezembro por referéncia de
um amigo e pela Ecitora
‘Saber, pois jé fui um colecio-
nadorda “Saber Eletronica
no final da década de 70. A
riqueza no detalhamento
das explicagdes torna assimilavel até os itens mais com-
plexos desta area. A simplicidade também é outro ponto
fundamental da revista e se destaca nos artigos “VM-1”
“Controle de um LED pela porta paralela’, pois qual-
quer projeto mais complexo requer conhecimentos
fundamentais que sé0 exercitados nesses arguivos.
Verifiquei que alguns leitores estao questionando 0
prego dos kits. Segue entao a experiéncia que tive com
uma montagem dese tipo. Trabalho com Manutencao In-
dustrial desde 1985, mas ha alguns anos fiz uma atuali-
zacao no SENAI ANCHIETA, que dé éntase em
Automacao Industrial. No projeto de formatura, nds, (eu
e mais cinco integrantes do grupo), propusemos
automatizar um balizamento utilizando um microcontro-
lador da familia 8051. Para minimizar a parte mecanica
usamos um carrinho de controle remoto e desenvolve-
mos a parte elétrica partindo dos motores de direcao e de
‘tragdo. Para referencia de deslocamento fixamos numa
das rodas um encoder feito com partes de um mouse e
engrenagens de mecanismo de toca-fitas, pois um
encoder verdadeiro era caro ¢ as dimensdes dos encon-
trados comercialmente nao eram adequadas,
Desenvolvemos muito nossas habilidades de manu-
seio com plastics e com cola térmica. Usamos um
sensor de proximidade para localizar, medir e posicionar
© carro em relagao & vaga encontrada (este foi empres-
tado pela empresa de um dos integrantes do grupo).
Através de uma sinalizago de LEDs definimos a
interface com o sistema sabendo as etapas e as deci-
sdes do mesmo. Além de estarmos limitados com cus-
tos, estévamos pressionados com prazo de entrega
projeto, a formatura, etc. Somos muitos gratos pelos
professores da época. Como o prazo nao é 0 caso de
alguns leitores, aconselho que pesquisem ao maximo
05 tépicos que vao abordar, pois quanto maior for 0
dominio sobre eles, mais numerosas serao as opcoes
de desenvolvé-los, adequando assim os custos envol-
vidos. Boa sorte a todos e nao desistamdos seus obje-
tivos, pois nada se compara com a sensagao de ver um
projetofinalizado. Parabéns pela Revista.
Waldir.
(Caro Walatr,
(Obrigado por compartithar conosco e com os demais
leitores a sua experiéncia. Certamente ela servird de es-
timulo a muitos leltores que se deparam com dificulda-
AAMAS
MECATRONICA FACIL NP 3 - MAAGOI2002
des na execucao de seus projetos. A solucdo dessas
dificuldades gera o desenvolvimento de habilidades que
vo além do prdprio projeto. A pesquisa realmente é fun-
damental para a execucéo dele. Procuramas trazer aos
leitores 0 maximo de informagées, mas mesmo assim, 6
impossivel esgotar um assunto em um nico artigo. Isto
se forna mais evioente em alguns artigos que descrevern
.@ montagem de projetos passo-a-passo, onde nem sem-
pre fomecemos muitos detalhes tecricos a respeito dela,
a fim de nao confundir 0 montador inexperiente. Sendo
assim, é muito valida a dica @ certamente seré tt! para
08 nosses leitores.
Say
Identificagao
ia, € parabénsll!
Adore as revistas “Mecatrénica Facil" e “Mecatronica
‘Atal’. O propésito € étimo, o contetido muito interes-
sante, a area promissora, a linguagem é clara, e ctima
a impressao, Espero poder assind-las em breve.
Nas préximas edicdes gostaria de encontrar informa
.g®es sobre sensores para mini-10b0s, principalmente aque-
les que permitem fazer com que o rob6 “ennergue”.
E antes que eu me esqueca, gostaria de compar-
tilhar minha identificagao com a ilustragéo do artigo
sobre a linguagem LOGO.
Rogério Schneider
Prezado Rogério
Ficarmos felizes em saber que estamos sendo iteis.
‘Ne momento néo estamos disponibitzando as assinati-
ras, mas acreditamos que isso sera feito em breve. Quando
{sso acontecer, pode ter certeza de que serd amplamente
dlvuigado nas nossas revistas e também no nosso site
(http:iwww.mecatronicafacil.com.br).
Quanto a sua su- ‘
gestao esperamos
abordar mais sen-
sores dese tipo em
artigos futuros. De
certa forma, 0 sen-
sor ultrasénico util
ado no robé Octa-1
permite que que ele
“enxergue” os obsté-
culos @ desvie deles.
Quanto a sua identi-
ficacéo, gostariamos
de compartilha-la
com os demais lef-
tores, pois acredita-
mos que néo foi ape-
nas. vooé que sentiu
essa identificacao...
SEGAO DO LEITOR
Mais competicGes no Brasil ~ O"robé bombeiro”
Prezado Senhor,
Meu nome é André Luiz Tristao Moreira, sou coorde-
nador técnico do Curso Técnico em Mecatrinica da Es-
cola Técnica Rezende-Rammel, situada na cidade do Rio
de Janeiro. Tenho acompanhado a revista Mecatronica
Facil desde 0 seu primeiro ntimero, encontrando artigos
excelentes e de facil entendimento por isso, venho in-
dicando a mesma a meus alunos.
Na revista de ndmero dois, no artigo intitulado “Guerra
de Robés”, sobre as portarias do MEC e do CREA, informo
que o CONFEA esté analisando as atribuigdes do Técnico
‘em Mecatrénica e do Engenheiro Mecatrénico e que o Curso
‘Técnico em Mecatronica de nivel médio (e pés-médio) ja es-
{80 devidamente registrados no MEC, aqui no Rio de Janeiro,
na Secretaria Estadual de Educagéo.
Sobre a Guerra de Robés, gostaria de ressaltar que
fiquei extremamente animado, pois hé 3 anos estamos ten
tando aqui no Rio de Janeiro realizar um evento em nivel
estadual (como se pode verificar em www.cetap.g12.br)
‘A Rezende-Rammel ha exatamente 3 anos realiza esse
tipo de competicao internamente. J tentamos organizar
campeonatos com a participagdo de outras instituiges
‘téonicas, mas infelizmente encontramos algumas dificul-
dades criadas por falta de conhecimento de alguns cole-
‘gas, que alegam que esse tipo de competigao gera violén-
ia, Estaremos realizando a proxima competicao interna
no més de maio de 2002, mais uma vez iremos tentar
montar um campeonato estadual, Nossa grande cificulda-
de esta na aquisigéio de componentes, visto que aqui no
Rio de Janeiro existem poucas lojas e suas mercadorias
no $40 muito variadas.
‘Aproveito a oportunidade para informar que, em 1998,
a Escola Técnica Rezende-Rammel participou da
EXPOTEC - Exposigdo Tecnolégica das Escolas Técni-
cas do Estado do Rio de Janeiro, realizada pelo CEFET/
RJ, na qual obtivemos 0 12 lugar geral com o Projeto
Mecatrénico: “Caro de Combate a Incéndio Radio Con-
trolado”, tratava-se de um veiculo radiocontrolado no
qual existia um extintor de inc&ndio que tambem era
acionado via radio. A idéia era criar um robé no qual 0
operador nao precisasse se aproximar muito do foco
do incéndio. Os passos do veiculo eram controlados a
distancia através de uma minicdmera instalada em
cima do veiculo, possibilitando que o operador
direcionasse 0 jato do extintor.
‘Com a obtencao desse 1* lugar, nos foi dado o direito
de representar 0 Estado do Rio de Janeiro na MOS-
TRATEC - Mostra Internacional Tecnolégica da América
do Sul, no ano de 1999, realizada em Novo Hamburgo -
RS pela Fundagao Liberato (todos os anos). Durante a
Mostra recebemos a visita do Comandante do Corpo de
Bombeiros do Estado do Parana, que se interessou pelo
projeto e nos explicou algumas dificuldades que os bor-
beiros encontram para levar a mangueira muilo proximo
a
6
do foco de incéndio. Pensando nesse problema monta-
‘mos um rob6 mais robusto, pesando mais de 50 kg, com
esteiras de aco e esguicho rédiocontrolado. Usando uma
camera protegida, o bombeiro pode, & distancia, aproxi-
mar a jato principal o mais perto do foco possivel. Esse
projeto recebeu o nome de “O Combatente", o qual rece-
beu 0 12 lugar geral na MOSTRATEC de 2001, propiciando-
os 0 diteito de participar do Mundial no México em 2002.
Infelizmente, no inicio de janeiro recebemos a noticia de
que nao poderiamos participar, pois os trés alunos insor'-
tos no projeto possuem mais de 18 anos e as regras do
mundial ndo 0 permitem,
Desde ja agradeco e peco que continue com o traba-
lho que ven realizando.
André Moreira
Prezado André,
Obrigado por nos prestigiar e nos indicar aos seus
alunos. Esperamos poder contribuir para a formagao de
todos eles. Ficamos felizes om saber também que os
cursos de Mecatronica esto passando a ter o respeito
que merecem, visio que é cada vez maior 0 nimero de
pessoas que trabalham com essa Giénoia. Esperamos
que esta revista, juntamente com a “Mecatrénica Atuar’,
possa contribuir ainda mais nesse crescimento. Quanto
4s compeligdes, 6 questo de tempo para que elas se tor-
nem cada vez mais populares e isso certamente propo
onaré uma maior facildade de obtencao e, principalmen-
te, o menor custo. Até Id, a utilizagao de material alterna-
tivo realmente tem se mostrado a melhor solugao. Espe-
ramos que com a popularizagdo da Fobética, os distribui-
dores passem a oferecer uma gama maior de componen-
tes para favorecer a construgdo des robos.
Quanto a0 “Combatente’, enviamas 0s nossos para-
béns. E uma pena vooés nao terem ido ao México, mas é
indiscutivel a validade do projeto para auxilar 0 ser hu-
‘mano nessas farefas que envolvem rico de vida. Conti-
nuem assim!
cee
CADE 0 AutoCAD ?
Prezados Srs
Gostaria de saber sobre a continuidade da série
de artigos sobre AutoCAD iniciada na revista Meca-
ironica Facil n®1 e sem prosseguimento na n®2. Mi-
nhas Consideragdes
Jonas S.Moraes
Prezado Jonas,
A série de artigos sobre AutoCAD aplicado 4
Mecatrénica passou a ser publicada na revista
“Mecatronica Atual, sendo que o segundo artigo en-
contra-se no segundo numero dessa revista.
MECATRONICA FACIL N?.3 - MARCO/2002
ROBONEWS
Newton C. Braga
4 -Usando
Lampadas
Mindstorms, mas foi somente em meados de abril de ae jucrescentes
conseguiu montar uma versao ‘beta’. Para consequir resolver 0 problema © prole- Rare Ajudar
tista teve que criar meios de movimentar 0 cubo em -eixos ortogonais de 90 Deficientes
graus. Diversos foram os problemas encontrads pelo autor do projsto como, Visuais
‘exemplo, as dificuldades em noontradas: pe o%
do LEGO. Isso levou a nece:
‘especial, Ouira questéio envolvida foi a de obter 0 torque neosssério para todos
‘08 movimentos com as pegas disponiveis no LEGO e, finalmente,lograr forga
_sufcienie das pingas para poder mover as parts d
acientes com TBI (Tra-
__Umatic Brain Injury - Defici-
“éncia Cerebral Traumatica)
jodem conseguir um grau
consideravel de independén-
cia fisica muito antes de con-
seguir a independéncia
cognitiva. Um projeto desen-
las em coordenadas CIE XY de modo a
poderem ser utiizadas pelo programa. Eis
ai um desaffo aos leitores que desejam ur
bom problema de Robitica e Inteligéncia
Artificial... autor foi J. P. Brown, que
-disponibiizou uma descriggo detalhada de
S24 projto no sie tpfpbrown 8.cony
cubesolverhtml.
‘as. O que se faz é modular a
luz de lémpadas fluorescen-
; com informagac
icional num sistema
~ toma portal proporciona 20
paciente assistencia nave-
_ chegada ao local desejado
__com maior facilidade. ‘Segun-
2
biolégicas e convencionais. Os Estados Unidos preacuparam-se, eno, ¢
utlizar robs para desativar essas armas de ne
Segundo Larry Shipers, do Departamento de Tecr jogia de Si
‘até um local seguro e trabalham na sua neutalizaao, Se existi agra eee a
(4 outro elemento critica, 0 rob6 se encarrega de retro evtando, assim, 2
presenga de humanos que ndo precisam se arriscar
“Enquanto um ser humano pode desarmar apenas uma bomba por da, um — =
196 pode desarmar 24 no mesmo itervalo de tempo ‘firma Lary Shipers,
MECATRONICA FACIL N'3 - MARGO/2002
Motores
Moleculares Po-
dem Propulsionar
Dispositivos
MEMS
Pesquisadores informaram que
‘conseguiram combinar moléculas
‘organicas com pecas de metal re-
‘duzidas para fabricar um motor ca-
paz de movimentar pegas bem mai-
ores (dezenas de vezes mais) do
que 0 dispositivo propriamente dito
‘0 professor Carlo Montemagno,
de Engenharia Mecanica © Ae-
roespacial da Universidade da
Calilémia, descreveu esses peque-
nos motores e outros disposit
os microscdpicos numa confe-
réncia sobre Sistemas Microe-
letromecainicos (MEMS) com d-
mensées que vao da espessura de
um cabelo humano até algumas
poucas moiéculas (em tamanho).
‘Achave para a fabricacao des-
ses micromotores, segundo 0
Prot. Montemagno, esta em mo-
Ieculas complexas como as que
sintetizam 0 ATP, as quais Séo
usadas como fontes de energiaem
todos os seres vivos. Seis estru-
turas moleculares foram 0 equi=
valente a um motor de trés ciclos
ou trés cilindros, Essas moléou-
las cercam outras sete que funci-
‘onaam como 0 elxo do motor. O dis~
positive inteiro néo mede mais do
que 11 nanometros de altura por
11 nanometros de diémetro - cen-
tenas de vezes menos do que a
espessura de um cabelo humano.
‘As interagoes quimicas fazem
‘com que os seis cilindros funcio-
nem em sequéncia rodando 0 eixo.
AA figura abaixo da uma idéia
daestrutura molecular deste motor.
A Honda Apresentou o
seu Novo Robé Humanéide
ASIMO pare Alugar
‘A Honda Motor Co. Ltd. apresentou uma nova verso do robé humanéide
ASIMO, que deverd estar disponivel para aluguel no Japao. Essa nova
versio traz diversas melhorias em relagao & anterior, apresentada em
rnovemibro de 2000 como, por exemplo, uma tecnologia de movimento mais
fiexivel que viabliza sou uso em areas piblicas.
(Qs avangos introduzidos no ASIMO possibilitam maior liberdade de
movimentos, tais como subir e descer escadas © rampas. Além disso, ele
pode reconhecer comandos de voz dos clientes.
‘A tecnologia i-Walk, implementada no rob, permite uma maior mobil
dade com um controle de movimentos em tempo real em 3-D.
( reconhecimento de voz que anteriormente era feito por um compute-
dor externo, agora esta embutido no proprio rob6,
© ASIMO ainda pode reconhecer a diregao de
‘onde vern um comand de voz habiltando-se para
virar-se para a pessoa que 0 comanda € seguir
‘0s comandos que ela da. Com boa capacidade
de visao e visibilidade 0 ASIMO (através de um |”
controlador portatil) pode ser comandado a uma
distancia de dezenas de metros.
(5 leitores podem assistir filmes do ASIMO
‘em agéio em: http:/world.honda.com/ASIMO/
‘movies! ou ter mais pormenores do robo no site
da Honda em_ http://world.honda.com/news/
2001/c011112.htm!
LED Detecta Substaéncias Quimicas
Cientistas da Universidade de Buffalo (EVA) implantaram centenas
ou possivelmente milhares de sensores quimicos em uma pastilna
semicondutora de LED. O trabalho desses cientistasfoi publicado na
revista Analytical Chemistry de 1° de marco de 2001.
© novo tipo de sensor é baseado em xerogels, que séo vidros
porosos desenvolvidos par um proceso sol-gel no qual uma solu-
‘go especial reage de modo a formar um polimero poroso. O xerogel
esultante € um material rigido como o vidro, mas possui uma in-
trincada rede de nanopéros. O mesmo grupo cientifico havia desen-
volvido uma técnica para aprisionar proteinas nesses xerogels. Ini-
cialmente, Eun Jeong Cho, da UB, conseguiu colocar um desses
xerogels de apenas 1/25000 polegada
de didmetro no topo de um chip de
LED. A idéia é transformar 0 LED em
um sensivel detector de substancias
quimicas. Segundo os criadores do
dispositivo, sera possivel implantar
sensores para dezenas ou milhares
de substéncias quimicas num LED,
obtendo-se assim tanto 0 sensor
quanto 0 indicador em Unico invé-
lucro.
MECATRONICA FACIL N°3 - MARGO/2002
Construindo um robo
com o LEGO Dact
Luiz Henrique Corréa Bernardes
‘Competicao! Palavra chave para estimular 0 apren-
dizado em Mecatrénica e, nesse quesito, 0 Kit 9720
Robolab da LEGO Dacta dé um show em termos di-
daticos e facilidade de uso, © objetivo deste artigo &
mostrar como funciona em linhas gerais este kit, cons-
truindo um robé capaz de detectar um obstaculo atra-
vés de suas “antenas’ e desviar-se do mesmo. O pon-
to forte deste material é a simplicidade em projetar
desenvolver os programas para controle do robd.
Essa facilidade est fazendo com
que o kit seja addotado em diver-
sas escolas do pais.
A atividade mais comum
exercitada nas escolas com
este kit, proposta pela prépria
LEGO, é a competigdo che-
mada “Enlatado”. Nela se de-
finem vérios grupos que tém
‘como meta montar e programar
tum rob6 que possa retirar la-
tas de um campo especii-
0, conforme ilustra a fi-
gura 1. Ganha a com-
etigo 0 grupo cujo
rob6 retire © maior
nlimero de la-
tas em dois
minutos.
Um Guia de Atividades chamado "Notas do Profes-
sor’, inciui informagdes detalhadas sobre a competi-
‘G40 “Enlatado’, bem como a desoriggo e especificagaio
para nove competigSes (desafios) adicionais.
© interessante no material é que nada vem ‘pron-
to”, ou seja, tudo esté desmontado e os manuais dao
apenas Sugestdes de como fazer alguns tipos de
acionamento e de programagao. Portanto, a criatividade
@ a percepeao sao exigidas ao maximo. Como 0
ambiente é de disputa, existe, naturalmen-
te, a unido do grupo, e o material do
professor orienta como montar essa
equipe e aproveitar 0 maximo de cada
elemento do grupo, delegando tare-
fas e responsabilidades. Como
‘exemplo, temos 0 especialista em
a &
LEGO DATA
Competi¢ao "Enlatado!
“comunicacao”, que é 0 encarregado por promover
equipe © 0 ovento. Essa pessoa tera que utilizar e
desenvolver outros conhecimentos, além daqueles
que esto relacionados @ Mecatrénica,
Para os alunos
pode ser uma experién-
cia muito gratificante,
pois eles vao, de certa
forma, gerenciar um
projeto complexo do
‘comeco ao fim, além
de lidar com dificulda-
Figura 2 - Vencedores da iGesesuiicas © SITE
competicdo “Eniatado" do -cionamento com pes-
SENAI Sorocaba, soas, sem contar que
‘i tudo isso tem uma “ple
tada” de competicao, considerando-se que todas as
equipes querem vencer. Qualquer semelhanga com a
Vida real dentro de uma empresa é mera coincidéncial
‘A figura 2 mostra alunos do SENAI de Sorocaba
em piena competieao do “Enlatado”, um grande even-
to feito na escola que movimentou todo 0 corpo dis-
cente e docente além da sociedade proxima da es-
cola (parentes, vizinhos e amigos dos aluncs). Figura 5 - Tore de tranemised,
Figura 4 - © tjolo AOX.
Figura 6 - Os transceivers.
© conjunto Desatio em Grupos 6 composto por
aproximadamente 700 pecas (figura 3). A seguir, de-
talharemos as principais:
A figura 4 exibe 0 Tijolo RCX, que é 0 “oérebro” do
sistema. Nele, armazenamos os programas que se-
ro executados. Ele tem os drivers de acionamento dos
motores, gerencia os sensores também toca misica
A figura 5 apresenta a torre de transmissao. Ela 6
ligada ao PC (ou Macintosh) através de um cabo serial,
Os dados sao transmitidos & recebidos do Tijolo RCX
por meio de luz infravermelha (como nos controle re-
motos de TV). A figura 6 jlusira em detalhes onde
fica 0 transceiver tanto da Torre como do tijolo RCX.
A figura 7 detalha os conjuntos de engrenagens
disponiveis, com as quais conseguimos até montar
um eixo com diferencial (figura 8). Essas engrena-
gens so facilmente montadas em conjunto com os
dois motores disponiveis (figura 9).
Figura 7
Conjunto de engrenagens.
Figura 9 - Motores disponives.
op.
Figura 10 - Tradisionais pegas de LEGO.
i
ee
Figura 11 - Agumas pepas para requintar a montagem.
LEGO DATA
=o
| toch wo th
Figura 14 - Palota de fungées junto com @ janela de ajuda,
‘expicando @ fungdo reverter.
Figura 12 - Filme de apresentagao do ROBOLAB.
Além dos tradicionais blocos do LEGO (figura 10),
temos até alguns elementos com requintes para en-
feitar as montagens (figura 11).
0 software ROBOLAB que foi desenvolvido em
conjunto com a National Instruments, é um poderoso
ambiente de programagao visual de facil aprendiza-
gem e utilizagao. Uma vez instalado o ambiente
ROBOLAB, podemos assistir a um pequeno filme que
ensina como fazer a comunicacéo com o ROX e a Cuca Peace
conexéo com sensores e motores (figura 12). para frente peratrds:
A figura 13 anuncia o ambiente de programacao
do ROBOLAB com um programa que gerengia 0 robo
“pate-volta", que construiremos a seguir. 2
en (] fo]
visual onde temos varios blocos de fungdes interliga-
dos. A figura 14 ilustra a paleta de fungdes junto com ed
a janela de ajuda explicando a fungao reverter. Sd
‘A tabela 1 mostra as funcdes utlizadas no nosso
programa.
Na seqdéncia, vamos mostrar como construir um
rbd uteando os oa ||
Fi
=|
eed fo
Erecrnees Sed
pee Loe)
Figura 18 - Ambiente de programacio do ROBOLAB. Tabela 1 - Comands utlizados no programa do robo
2 SS i MECATRONICA FACIL NE 4 - Manicorz002
Quando abrimos
a caixa pela primeira
vez, ficamos assustados!
Sao muitas pegas, mais de 700.
Passado 0 susto, vem a duivida: como
seria 0 nosso rob6? Nao tinhamos nenhum
projeto de um robé totalmente pronto.
Dispunhamos somente do material da Lego que su-
gere alguns modelos de bases de robés e seu tipo de
acionamento. Apés varias discussdes ¢ tentativas,
chegamos a um consenso: 0 nosso robé teria esteira
@ seria do tipo bate-volta, um rob bonito do tipo ex-
plorador marciano, facil de montar e programar, como
ME@ATRONIOA FACIL N= 3= MAREO2002
pode ser observado
na nesta pagina. Entao,
maos & obral
Comece a montar um conjunto
de tragao de uma esteira com as pe-
gas exibidas na figura 15, observe que pré:
ximo de uma das rodas temos uma engrenagem
que ira se acoplar 20 motor mais adiante. Monte dois
conjuntos simétricos, Em seguida, construa uma base
com os motores e engrenagens de tracao. A figura 16
ilustra as pegas utlizadas. Agora chegou a hora de
juntar as duas partes de tragdo com os motores, veja a
seqiiéncia nas figuras 17 © 18.
a &
LEGO DATA
Figura 15 - Pegas para a montage de um
conjunte de vagao de uma estera
Figura 16 - Pecas para a moniagem das
‘motores.
Figura 17 - Eneakendo os dois conjuntos de
ttagao.
e
a
Figura 18 - Montando os motores na base de
‘tageo.
Figura 19 - Base do robd.
Figura 20 - Colocanda 0 tila ROX ra base do 10b6.
Pronto, j4 temos uma base montada (figura 19), nela iremos
colocar 0 tijolo RCX com o sensor de infravermelho virado para a
traseira do robé (@ frente é onde estao os motores), veja detalhe na
figura 20.
A figura 21 jlustra a colocagao de um suporte que ira fixar 0
conjunto de antenas do rob6 cujas pecas sao mostradas na figura
23. Isso feito, vamos ligar os motores ao tijolo RCX (figura 22) e
colocar os sensores de microchave (figura 24).
‘Agora pademos colocar 0 conjunto das antenas em seu lugar,
conforme mostra a figura 25. Feito isso, vamos fazer as ligagdes
entre 0 tijolo RX e os sensores conforme figuras 26 e 27. Para
finalizar a montagem mecanica, colocamos a base superior do su-
porte das antenas ilustrado na figura 28.
Temos 0 rob6 pronto, mas para deixa-lo mais bonito e cibernético,
colocames alguns detalhes para enfeitd-lo como as mangueiras (fi-
gura 29) ¢ uma antena parabdiica (figura 30).
Para dar inteligéncia ao nosso robé usamos o programa jé ilus-
trado na figura 13, que teve o seu funcionamento descrito anterior-
mente, fazendo com que 0 nosso robé ande pata frente e, quando
bater em um obstaculo, volte para tras, vire para esquerda reco-
mege a andar para frente,
Para transferir 0 programa ao robd, conecte a torre de
Infravermeiho no PG e posicione-a de frente ao sensor de
infravermetho do tijolo RCX (figura 31) utilizando 0 ambiente de
programacao do Robolab no PC.
Figura 21 - Colocando a base para o conjunto dé antenas.
Figura 23 - Pegas para 2 montagom das
‘antenas.
Figura 24 - Fiando 0
Figura 25 - Calocando © eonjunto d=
Figura 26 - Fixando 6 flo ab
ra
LEGO DATA
Neste momento & sé colocar 0 nosso robo no modo “Run” (figu-
ra 32) ¢ vé-lo andar!
Este artigo demonstrou a facilidade de montagem e programa-
‘co do rob6 utlizando os kits da Lego Dacta. O que ele nao mos-
trou, foi a interagSo entre as pessoas no laborat6rio da Redagao
para a montagem do robé. A curiosidade, as idéias surgidas, os
protétipos, os tesies, enfim... © ambiente ficou altamente contagi-
ado por esta proposta da LEGO! Acreditamos ser essa a mais
importante peca do kit
‘Se voce esta pensando em montar um laboratério de Robotica,
Treinamento ou simplesmente fazer experiéncias, os conjuntos da
LEGO Dacta podem ser uma excelente escoiha. No Brasil, vocé
podera encontré-los na Edacom (www.edacom.com.br)
Figuia 27 - Ligando os sensoves 20
Figura 29 - Colocando as
mangueiras.
Figura 30 - Fixando a “antena
parabélica’
i
ee =
| 4 serve 4
< 5|—servo!
10Ka! | | =
= nd
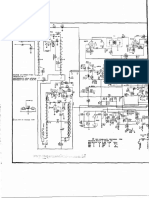
Figura 18 - Circuito de aplicagao.
MECATRONICA FACIL Ni3 - MAFEO2002 |
{das seriais como, por exemplo, as disponiveis em
mmicrocontroladores como o Basic Stamp, da Parallax.
Este chip & encontrado em invélucros de 8 pinos
com a pinagem ilustrada na figura 17.
A faixa de tensbes de operagdo vai de 3,0 a 5,5 V
€ 0 setup da linha serial em 2400 bauds € de 8 bits,
sem paridade e um bit de parada.
Dentre as aplicagdes sugeridas pelo fabricante te:
mos os modelos de controle remoto, aplicagoes de
mecatronica, animatronica e robética, além de mui-
tas outras envolvendo méquinas industrais
Um dos problemas dos servos comuns é 0 modo
como eles S40 controlados: através de pulsos de du-
ragéio controlada. Com 0 FT639 isso nao ocerre.
FUNGIONAMENTO
© F639 tem dois modos de operactio: modo setup
© modo ativo.
O chip parte no modo setup. Esse modo € usa-
do para fixar 0 comprimento do pulso e 0s valores
iniciais, além dos valores de partida para os 5 ser-
vos. No modo ativo ele envia os pulsos de controle
a0s servos e os controla através da linha serial de
2400 bauds
‘Os comandos so formados por um byte. Assim,
cada comando envia um caractere através da linha
serial. Cada servo RC tem 256 posigdes. Para enviar
a posigao de um servo, o FTB39 precisa de dois co-
mandos. © primeiro deles contém o niimero do servo
@ 0 nibble inferior (4 bits mais baixos) da posigéo. O
segundo contém 0 numero do servo e © nibble superi-
or (4 bits mais altos) da posicao.
‘Com 256 posigdes, 0 servo pode ser posicionado
entre 0 @ 90 graus de acordo com a largura do pulso
gerado. A posigao inicial pode ser programada pelo
envio de um sinal no modo setup.
CIRCUITS & APLIGAGAD
Na figura 18 mostramos como é simples utilizar 0
F639 no controle de servos usando a porta serial
(RS-232).
Para uma linha serial que forneca uma tenso de ~
aV++ndo 6 necessario 0 uso do diodo e dos resistores
podendo, assim, a saida da porta ser conectada dire-
tamente ao Cl.
cédigo de programagao pode ser obtido no en-
derego:
httpy/Avwwferrettronics.com/software.htm!
Neste site existem diversos exemplos de pro-
gramas para o controle de servos usando o
QBASIC. .
ELETRONICA
s computadores que
estamos acostumados @ ver
80 compostos geralmente por teclado,
monitor, GPU, impressora e mouse. Eles
foram criados para se comunicarem ou intergirem
com os seres humanos.
Aigumas aplicagdes tipicas desses computadores
840: gerenciamento de banco de dados,
processamento de texto e andlise financeira. Todas
essas tarefas sao executadas dentro do gabinete do
computador, que contém a Unidade Central de
Processamento (CPU em inglés), discos rigidos,
memérias, etc. No entanto, 0 verdadeiro pro-
cessamento é realizado dentro da CPU.
Como 0 leitor pode ver, 6 monitor, o tectado, 0 mouse
mesmo a impressora, sao usados apenas para nos
mostrar os resultados do processamento, ou para nos
permiticinformar os dados a computador.
Vocé sabia que existem diversos outros tipos de
‘computadores a nossa volta e que, neste instante,
eles estdo executando silenciosamente as suas tare-
fas e tomando © mundo mais agradavel? Esses com-
putadores podem estar em um brinquedo, no controle
remoto da televisdio, no carro e até nas geladeiras
mais modernas.
Nés geralmente nfo chamamos tais dispositivos de
computadores, mas sim de “microcontroladores”. E f8-
cil entender 0 seu nome: “micro”, pois eles so muito
O|CTAVIO NOGUEIRA
i PARTE
pequenos, e “contro-
ladores” porque eles contro-
lamos aparelhos & nossa vol
ta. Ao contrario dos compu-
tadores, os microcontroladores
foram desenvolvidos para se comunicarem com ma-
quinas, entdo eles néio necessitam de monitores, te-
clados, etc., 0 que faz com que sejam muito mais ba-
ratos que 0s computadores.
Atualmente, existe uma quantidade imensa de t-
pos de microcontroladores diferentes, alguns mais,
especializados para uma determinada fun¢do © ou-
‘ros para uso mais genérico. Normaimente, eles po-
dem ser programados inimeras vezes, mas alguns
aceitam a programagao uma unica vez. Os mi-
crocontroladores séo muito versdteis, e um mesmo
modelo pode controlar uma cafeteira, um aeromodelo
0u 0 sistema de air-bag de um carro.
Esta série de artigos ira apresenti
microcontroladores mais faceis de utilizar, 0 BASIC
Step 1. Ele 6 um conjunto sofisticado de componen-
tes eletrGnicos, montado em uma pequena placa po-
dendo ser programado para executar praticamente
qualquer tipo de automagao e controle necessarios
nos dias de hoje. Na figura 1 0 leitor pode ver seu
aspecto fisico e dimensées.
Para que 0 microcontrolador faga o que nés que-
remos, temos que “ensind-lo” ou programéd-Io com as
MECATRONICA FACIL NE 3 - MARGO;2O02
Pr
|
29 a
Megidas em mm
Figura 1 0 Basic Step 1
etapas, passo a passo, de nossa tarefa, Normalmen-
te, 0s microcontroladores utilizam uma linguagem pro-
pria e de dificil aprendizagem. © BASIC Step 1, a0
contrario, utiliza a linguagem TBASIC, uma lingua-
gem muito simples, e ao mesmo tempo poderosa.
Com ela, vocé poderd fazer o microcontrolador exe-
cutar tarefas complexas em questo de minutos. Atu-
almente, existem no mercado diversos produtos utii-
zando 0 BASIC Step 1 como “cérebro”.
Quando falamos em “cérebro”, o que realmente
estamos dizendo 6 que queremos que o
microcontrolador imite de alguma forma 0 funciona-
mento de nosso cérebro verdadeiro, mas geraimente
nao paramos para pensar em como ele funciona.
(© nosso cérebro se baseia em “sensores” (visao,
tato, etc.) para tomar decisdes e exeoutar alguma
agi. Por exemplo, suponha que voce esteja andan-
do de biciclota e veja um buraco & sua frente. © seu
cérebro receberd uma informagao de um de seus
“sonsores” (neste caso, 0s alhos). Baseado nas infor-
magdes que recebeu, ele analisa 0 tamanho do bura-
MECATRONICA FACIL N'3 - MARGO/2002
co, sua profundidade, etc. ¢ toma uma deciséo, por
exemplo, desviar-se do buraco. Ato continuo, manda
(0s seus bragos virarem a bicicleta impedindo 0 tom-
bo. Tudo isso acontece em uma fragao de segundo.
Este primelro artigo ira mostrar como utilizar 0 co-
mando de saida do BASIC Step 1 e a cada um dos
proximos iremos vendo novos comandos e novas ideéi-
as para o leitor experimentar. Apés estudé-lo, vocé
sera capaz de criar suas préprias aplicagées para os
microcontroladores.
ara realizar a parte pratica de cada artigo o leitor
ird precisar de um computador PC rodando Windows
9 ou superior.
Para este artigo particularmente, voce ira precisar
ainda de:
1 — Médulo BASIC Step 1
4 — Placa Step Lab
1 — Cabo de gravacio
2.— LEDs (diodos emissores de luz) vermethos
2— Resistores de 470 ohms %4 W
1 — Fonte de $V
Fios de ligagao,
“Todo sistema microprocessado compoe-se de dois
componentes basicos: hardware e software. O
hardware € composto de todos os componentes fisi-
cos do sistema e o software & uma lista de instrugdes
que fica “dentro” do hardware e executa as fungdes
desejadas por nés. Iremos agora oriar 0 hardware.
Para permitir que 0 nosso microcontrolador funcio-
ne e interaja com 0 mundo fisico, iremos montar al-
gum hardware. Para facilitar as experiéncias, usare~
mos uma placa chamada “StepLab" que, como 0 nome
indica, 6 uma placa de montagem para o BASIC Step
1, ou um “laboratério” de experiéncias.
Ela facilita muito as montagens, pois possui
conector para fonte de alimentagao, cabo de grava-
40, soquete para o microcontrolador e uma area de
protétipo ou “protoboard’. Na figura 2 podemos vé-la,
Neste primeiro artigo iremos fazer algo bem sim-
ples para nos habituarmos & placa StepLab, ao com-
pilador @ a modo como gravar o primeiro programa
no BASIC Step 1
Como programa inicial iremos fazer um LED pis-
car. Um LED 6 um tipo especial de “lampada” que pode
ser facilmente ligado aos microcontroladores. Exis-
tem dois detalhes que nao podem ser esquecidos
quando estamos trabalnando com LEDs: 0 primeiro, 6
que devemos utilizar sempre um resistor em série com
ele para limitar a corrente, do contrario ele ira quei
mar, no nosso caso um resistor de 470 ohms € sutici-
ente. O segundo detalhe, € que, diferente das lampa-
das comuns, 0 LED possui polaridade, ou seja possui
um terminal positivo e outro negativo. Se o ligarmos
invertido, ele nao ird funcioner, mas também nao iré
queimar.
Ata Eyal
Figura 2 ~ StepLab.
ENTENDENDO © PROTOBOARD
© BASIC Step 1 possui 14 pinos como pode ser
visto na figura 7, e alguns destes pinos sao usados
Para a conexao com 0 PC para a transferéncia do
Programa, enquanto outros sao usados para receber
a alimentaco. Nés temos 8 pinos (pin 0 até pin 7)
nossa disposicao para utilizar em nossas
aplicagées.Na placa StepLab, tomos estes 8 pinos
a0 lado do protoboard.
E importante entender como 0 protoboard funci-
‘ona para podermos utilizé-lo. Como 0 leitor pode
ver, ele tem uma grande quantidade de furos onde
colocamos os componentes da nossa montagem,
Como e onde colocar os componentes, 6 que fara
‘a montagem funcionar ou nao. Os furos horizontais
estéo interligados entre si em blocos de furos, ou
seja temos 5 furos interligados @ esquerda e mais
5 a direita
Na figura 4 podemos ver com mais detalhes como
isso funciona, as linhas horizontais pretas mostram
como 0s furos esto interligados
Muito bem, chegou a hora de montarmos 0 nosso
“hardware”. Com a alimentagao desligada, faa as
conexdes de acordo com a figura 5. Cerlifique-se que
© terminal menor do LED esta ligado ao resistor.
© nosso hardware esta pronto, mas ele simples-
mente nao faz nada! Se nés ligarmos a alimentagao,
nada ird acontecer! N6s montamos o hardware, con-
tudo ainda nao escrevemos 0 software, entao o siste-
ma ainda nao funciona.
Para muitas pessoas, quando falamos em progra-
ma de computador, um sentimento de panico logo as
domina. Itemos mostrar que é realmente simples fa-
zer um programa para 0 BASIC Step 1
Um programa nada mais que uma sequéncia
de comandos para 0 microcontrolador. Ele ira exe-
cutar EXATAMENTE 0 que escrevermos, Tais co-
mandos devem estar em uma ordem légica e se-
rem entendidos pelo BASIC Step 1, Esse progra
ma & criado no PC e depois transferido para o
BASIC Step através do cabo de gravacao. Deve-
mos tomar muito cuidado ao escrevermos o pro-
grama, pois qualquer erro fard o sistema nao fun-
cionar, e encontrar um erro apds termos terminado
de escrever 0 programa nao é das tarefas mais
agradaveis.
Figura 3 - Foto do Step Lab.
MECATRONICA FACIL N° s - MARGO/2002
Figura 4 ~ Ligagao dos turos do Protoboard.
Antes de comegarmos @ esorever 0 programa, va-
mos pensar um pouco. O BASIC Step 1 ird fazer o que
Inés escrevermos e na seqliéncia exata que escrever-
‘mos, Se tomarmos por anslogia 0 nosso cérebro, vere
‘mos que ele funciona do mesmo modo. Suponha que
iremos fazer um “programa para 0 nosso cérebro, sera
um programa simples, apenas para comprar uma lata,
de refrigerante em uma maquina de venda,
Para executar essa tarefa, devemos seguir uma
seqtiéncia de procedimentos na seguinte ordem:
1 — Coloque uma nota de RS 1,00 na maquina
2 — Espere a luz verde acender
3 — Aperte o botéo do tipo de refrigerante desejado
4 — Veja a lata cair na abertura de saida
5 — Pegue a lata
6 — Abra alata
7 — Beba 0 refrigerante
8 ~ Arote.
E realmente simples, néo? Mas somente por-
que jd fizemos isso diversas vezes. O que aconte-
ceria se 0 seu cérebro executasse 0 seguinte “pro-
rama”?
1 — Aperte 0 botdo do tipo de refrigerante desejado
2 Abra alata
8 ~ Coloque uma nota de RS 1,00 na maquina
4—Pegue a lata
5 - Arrote
6 ~ Beba 0 refrigerant
7 ~ Espere a luz verde acender
8 — Veja a lata cair na abertura de said.
Nao aconteceria muita coisa, nao? Apesar de to-
dos os comandos necessatios terem sido executa-
dos, a ordem deles esta orrada e a tarefa nao 6 exe-
cutada. Nos microcontroladores acontece a mesma
coisa. Devernos utilizar os comandos corretos na or-
dem correta.
Muito bem, vamos escrever um programa.
Coloque 0 BASIC Step 1 na placa Step Lab, li-
gue a fonte de alimentagao © conecte o cabo de
gravacéo na placa e em uma porta serial livre do
PC. Se voce ja instalou o compilador em seu compu-
Ve
anal |
Figura 5 ~ Gonexées das componentes.
MECATRONICA FACIL N's - MARGO/2002
tate
oobi
a
La +
Figura 6 — Complador Basic Step 1
tador, execute-o e vooé vera algo parecido com a
figura 6.
Como 0 leitor pode ver, 2 maioria da tela esta em
branco, 6 aqui que iremos escrever © nosso progra-
ma. Digite 0 seguinte programa, tomando 0 cuidado
de escrever EXATAMENTE igual.
pause 1000
goto novamente
A sua tela deve ficar igual & da figura 7.
Para compilar 0 programa e grava-lo no BASIC
Step 1, clique no icone Download no topo da tela.
Se tudo estiver correto, 0 LED ligado ao pino 0 de-
verd comegar a piscar. O segundo LED nao iré pis-
car, pois ainda nao escrevemos nenhum cédigo para
controla-lo.
Vamos entender 0 que acontece quando clicamos
no icone Download. A primeira coisa que 0 compila-
dor faz 6 checar se todos os comandos estéo escri-
tos corretamente e se todos sao entendidos pelo
BASIC Step 1. A seguir, ele converte os comandos
para um formato que © microcontrolador possa enten-
der e, apds isso, é iniciada a gravago do cédigo no
BASIC Step, que pode ser acompanhada por uma
barra de porcentagem, indo de 0 até 100%.
Se uma mensagem de erro como “Existe um erro
na linha marcada” aparecer, significa que escrevemos
alguma coisa errada nessa linha. Confira atentamen-
te 0 que voce escreveu e tente novamente.
Vamos agora analisar 0 nosso simples programa:
primeiro comando que utilizamios é 0 OUTPUT.
Cada pino do BASIC Step 1 (pin 0 até pin 7) pode ser
usado como entrada ou como saida; como queremos,
controlar um LED, devemos configurar 0 pino como
saida (output), entdéo empregamos 0 comando
OUTPUT 0.
© proximo item do programa é 0 novamente:
ele nao é realmente um comando. Em diversas oca-
sides nés queremos marcar uma posigéo do pro-
grama para que possamos fazer a execugdo voltar
2 esta posigao. E exatamente isso que este item
faz, ele € apenas um rétulo que marca esta posi-
940 do programa. Veremos isso novamente mais
adiante.
‘Aié agora 0 que fizemos foi configurar 0 pin 0 do
BASIC Step 1 como saida. Nos microcontroladores,
uma saida pode ter um nivel de tensao alto ou
baixo, no nosso caso 5 volts ou zero volts. Ou-
tra forma de se referir a alto e baixo é utilizar “1"
ou "0"
Pense em um interruptor de uma lampada: quan-
do ele esta em uma determinada posigao a lampada
esta apagada, quando esta na outra, esta acesa. Isto
6 chamado l6gica bindria, s6 existem duas possibili-
dades, ligado ou desligado, alto ou baixo, “1” ou ‘0”.
Por mais que vocé tente, no existe uma posi¢ao
intermediaria do interruptor.
No nosso circuito, se desejamos acender o LED,
deveremos fazer 0 pino do BASIC Step 1 ir para ni-
vel “0 ou zero volts, pois 0 LED esta ligado com um
terminal & tenso de 5 V 6 0 outro terminal ao pino do
BASIC Step 1. O pino esta funcionando como um
Interruptor, que pode ser ligado e desiigado sob co-
mando do nosso programa. Para fazer 0 pin 0 ir para
nivel ‘0’ utilizamos 0 comando pin 0=0.
Vocé deve saber que os microcontroladores exe-
cutam as instrugdes muito répidamente. O BASIC
Step 1 executa em média 2000 instrugées por se-
gundo. Se nés féssemos apagar 0 LED no proximo
clea) xoq seis 5)
Figura 7 ~ Programa.
MECATRONICA FACIL N° 3 - MARGO/2002
comando, tudo seria tao rapido que nem seriamos
capazes de ver o LED aceso. O que fazemos ¢ in-
Cluir um comando que leva o programa a parar por
um determinado tempo.
Este comando é 0 PAUSE 1000, ele faz com que
© programa pare por 1000 milissegundos, ou seja 1
segundo, Nés podemos utlizar qualquer valor para 0
‘comando PAUSE, neste caso 1000 nos permite ver 0
LED aceso.
O préximo comando é pin O=1, ele faz com que 0
pin 0 va para o nivel alto, ou seja 5 V, e como um dos
terminais do LED jé esté ligado ao 5 V, esse coman-
do faré 0 LED apagar.
‘Agora usamos 0 comando PAUSE 1000 novamen-
te para parar o programa por 1 segundo. Neste ponto
© LED esté apagado.
préximo comando é 0 GOTO, ele faz com que
‘a execugao do programa va para um determinado
onto. Quando discutimos o rétulo novamente: vi-
mos que ele servia para marcar uma posicao. O
comando GOTO serve exatamente para voltarmos
até aquele ponto. Quando executamos a instrugao
goto novamente, o programa ird voltar para a se-
gunda linha do programa e ird executar a partir dali
Essa repeticao do programa faré 0 LED acender &
apagar continuamente.
Este nosso primeiro programa foi bem sim-
ples, mas serviu para aprendermos uma série
de conceitos basicos que irdo ajuda-lo quando
for escrever programas maiores e mais comple-
xos. Um ponto que ainda n4o abordamos ¢ so-
bre a listagem do programa. Se vocé olhar o para,
ele, podera identificar todas as instrugdes e
saber exalamente o que ele faz. Isso é facil
porque foi vocé quem o fez e porque ele 6 bem
Pequeno. No caso de programas maiores é sem-
pre bom colacar comentarios.
Comentarios, como o proprio nome diz, sao uti-
lizados apenas para dar-nos uma idéia do que 0
programa faz. © microcontrolador simplesmente
ignora-os. Para colocarmos comentarios em nos-
50 programa, devemos usar o sinal apéstrofe (’). ©
microcontrolador simplesmente ignora tudo o que
estiver entre 0 apéstrofe e o final da linha
O nosso programa poderia ser comentado assim:
EYL
MICROCONTROLADORES:
APRENDA A USAR A
FERRAMENTA
DO FUTURO!
Siga o curso dos microcontroladores BASIC
Step | ¢ faca todas as experiéncias na pratica
com o material fornecido pela Tato Equipamen-
tos Eletrénicos.
O kit inck
IBASIC Step |
1 Placa Steplab
1 Fonte de alimentacao
‘I Cabo de gravacao
I Disquete com o compilador
Tudo isto por apenas RS 99,00.
TATO EQUIPAMENTOS ELETRONICOS
Rua Ipurinas. 164
Sao Paulo - SP - 04561-050
Tel (tl) 5506-5335,
http://www.tato.Ind.br
© programa ira funcionar exatamente do mes-
mo modo e 0 seu tamanho sera 0 mesmo, mas
agora ele fica muito mais facil de ser entendido. Se
voo8 0 pegasse de outra pessoa, bastaria ler os
comentérios para saber 0 que ele faz
Uma coisa interessante sobre os mi-
crocontroladores 6 que o mundo de “equipamentos
inteligentes* esta se expandindo cada vez mais
répidamente e ndo mostra nenhum sinal de dimi-
nuir. A medida que a tecnologia avanca, os
microcontroladores ocupam espacos antes nao pen-
sados, € equipamentos obsoletos se renovam com
a sua utilizagao. Vocé pode tomar parte dessa re-
volugdo. Este primeiro artigo foi apenas uma intro-
duc&o aos, micro-
controladores, mas
pat s : 10 saida voce ja sabe como
novamente para o programa retornar eles funcionam e jd co-
pin 0-0 ‘1 meou a programa-los.
pause 1 1 io com o LED liga Quem sabe vocé nao
MECATRONICA FACIL N#3 - MARGO/2002
consegue criar 0 préxi-
mo “grande produto”
utilizando os micro-
controladores? @
39
a =z
pL
t
=
Uma boa parte dos equipamentos
mecatrénicos, eletrénicos e mesmo nao ele-
trénicos usados no nosso dia a dia, tem sua
inspiragao em formas vivas. A Biénica, que
6 a ciéncia que procura criar equipamentos
que imitem formas vivas, é responsavel pelo
‘sucesso de tais equipamentos. As maravi-
has da tecnologia que so geradas pelo
homem e a que a Natureza ja usa ha mi-
Ides de anos, sdo 0 assunto deste artigo.
uando observamos um helicéptero em voo €
admiramos a engenhosidade dos homens
KF cue inventaram tal equipamento, nao nos da-
mos conta de que a Natureza ja tinha resol-
vido 0 problema da parada no ar ha milhdes de anos
‘com simples insetos como a libélula e, posteriormen-
te, com 0 beija-fior.
Da mesma forma, quando aplaudimos o talento
dos homens que criaram o radar, nao percebemos que
esse equipamento foi totalmente inspirado nos mor-
cegos, que jé possuiam a solugdo para seu uso mi-
Ihdes de anos antes, dada pela Natureza
Esses dispositivos e equipamentos que se ins-
piram em solugdes dadas pela Natureza sto fruto de
uma ciéncia muito importante, que € a Bidnica.
A Eletronica e a Mecanica quando unidas resul-
tam na Mecatrénica ¢ esta ultima quando unida &
Biologia pode criar solu¢des muito interessantes
para problemas tecnolégicos, as. quais merecem
ser analisadas.
O Radar e o Sonar
AA idéia de utilizar sons @ ondas de radio para detectar
objetos ¢ apicada pela Natureza ha milhdes de anos, @ ja
tivemos a oportunidade de detalhar como isso ovorre.
No entanto, 0 uso da eletricidade pela Natureza
para deteccao de objetos vai além, e existem solu-
Ges muito atraentes que podem ser aproveitadas pela
nossa tecnologia.
36
Newton C. Braga
Existe um peixe denominado Itui-Cavalo (cujo
nome cientifico é Apteronotus Albifrons, da famtlia
dos Gymnotoidae), que vive em rios de aguas escu-
ras da Amazénia ¢ é capaz de utilizar campos elétri-
cos de baixa freqdéncia para detectar objetos & sua
volta e mesmo outros animais.
Esse peixe possui um drgao gerador de eletrici-
dade do tipo semelhante aos usados pelos peixes
elétricos, 0 qual produz um campo de corrente de
alguns volts em torno do animal.
A freqiéncia desse campo, que varia de 400
Hz a2 000 Hz, dependendo do peixe, é tao estavel
que jd se utilizou esse animal para gerar os pulsos
de sincronismo que alimentam um reldgio, obser-
ve a figura 1
(O que acontece é que, ao lado do érgao emissor, 0
peixe tem drgdos sensores que Ihe permitem
fazer uma “imagem mental” do que esta a
sua volta pelas deformagoes que as linhas
do campo de corrente sofrem na presen-
‘cade objetos menos condutores ou mais
condutores.
Ja publicamos anteriormente 0
modo de se “ouvir* o campo de cor-
rente desse peixe (que pode ser encon-
Divisor
de froquéncia
—Eletrodo
~ Aquario
Eleirodo
Figura 1
ltui-Cavalo - Pobxe que gera um campo elético para @
orientagao.
“MECATRONICA FACIL N® 3 - MARCO!0G2
Eletrodos (fos de 20 em
com pontas descascadat
Figura 2 - Sincronizando um relégio com 0 Itut-Cavalo,
trado em casas de pelxes ornamentals de Sao Pau-
lo), ou de se observar a forma de onda do sinal emi-
tido num osciloscépio. Para isso, basta colocar no
aquédrio em que se encontra o animal dois eletrodos &
ligé-los entrada de um bom amplificador de audio
ou de um osciloscépio, conforme ilustra a figura 2.
O sinal, cuja amplitude pode passar de 2 volts ,
6 captado facilmente e excita qualquer circuito sem,
problemas.
A Binica, observando formas de vida como
essa, com solugées interessantes para 0 pro-
ee Mage "MA da orintacdo em gues Tuas, po-
der criar o equivalente oletrénico ou
mecatrOnico para a orientagao humana
ou de robés.
Uma possibilidade importante con-
siste em utilizar campos magnéticos
j criados por bobinas, veja na figura 3,
sonsores apropriados num circuito de
“ eT campo
Le foreseen
l (pee
1 a * Sina de aviso
Figura 3 - Usando campos magnétios num sistema de orienta:
G0 para cegos.
MECATRONICA FAGIL N°S - MARGO/Z002
Figura 4- 0 sistema hidraulico de movimento de uma aranha,
Processamento em um equipamento de ajuda para
cegos.
‘Os pequenos objetos metalicos que as pessoas
carregam ou mesmo as suas propriedades
diamagnéticas podem causar deformacdes no cam
po, as quais seriam detectadas e processadas pelo
Circuito informando ao cego, quer seja por meio de
sinais auditivos, quer seja por estimulos diretos ao
cérebro.
Inspirados nesta mesma idéia podemos sugerit 0
desenvolvimento de equipamentos de estacionamen-
to ou detecgao de colisao para automdveiso ou orien-
tago para robés méveis,
A Movimentagdo Hidrdulica da Aranha
‘A Robotica (como ramo da Mecatronica) est numa
fase de desenvolvimento espantosa e a cada dia ve-
mos os mais estranhos “seres mecanicos" em demons-
tragao, com sistemas de propulsdo que realmente nos
deixam pasmos diante da capacidade de imaginagao
de seus criadores.
Todavia, a Natureza, através da Bidnica, pode ser-
vir de inspiragao para a tecnologia a ser usada na
movimentagao de robes.
‘A Natureza nunca utiizou a roda coma solucéo de
movimento para nenhum dos seres vivos que conhe-
cemos. Entretanto, as solucées hidrdulicas foram apro-
veitadas © de uma forma muito interessante. Ha uma
espécie de aranha que se movimenta gragas a sua
hipertensdo arterial !
‘Nas juntas das pernas desse inseto, existem pe
quenas bolsas que, a0 se expandirem, fazem com
que as pernas se desloquem no sentido necessario
20 movimento, conforme ilustra a figura 4.
Quando essa aranha deseja saltar, e 0 cérebro
envia ao sistema de propulsao do inseto esse co-
mando, 0 que acontece é que a presso san-
guinea do inseto aumenta enormemente in-
jetando com pressao liquido nas bolsas
das articulagdes. Com a rapidissima
expansdo as bolsas incham e as
peras da aranha se movimentam
no sentido de fazé-la saltar.
0 sistema cardinice do airéscopia
No interessante livro do autor russo |. Mirov (La
Bicnique — Edigdes EM, de Moscou de 1970) 0 autor
descreve em pormenores como se descobriu a propul-
‘so hidraulica da aranha e sugere como ela poderia ser
usada em robés ou mesmo em veiculos “saltadores”
O Giroscépio da Libélula
Um dos problemas mais intrigantes do vdo dos
insetos 6 a capacidade desses animais tio pequenos
conseguirem manter sua estabilidade.
Nos avides modernos usamos 0s giroscépios para
manter sua rota e também evitar movimentos laterais
que poderiam tornar desconfortavel a viagem para os
passageiros (0s avides usam dois giroscépios)
Como a Natureza néo faz uso da roda na maioria de
suas Solugbes, 0 girascépio na forma tradicional do disco
suspenso em um sistema cardanico nao pode ser en-
conirado nos seres vivos. Atente para a figura 6.
Assim, @ solugao apresentada pela Natureza e
que também ja é aproveitada pelo homem em al-
guns tipos de sensores, € a do conjunto de lami-
nas vibrantes.
Em certos insetos, como por ex. a libélula, foram
encontradas cAmaras contendo cilios que, vibrando
de forma muito rapida, apresentam o mesmo compor-
tamento do disco que gira em um giroscépio, ou soja,
uma inércia muito grande a qualquer tentativa de se
modificar a direcao de suas oscilagoes.
AA forga que surge com as mudangas de direcao é
percebida por drgaos sensores apropriados e enviada
a0 cérebro na forma de impulsos que permitem a0
animal corrigit ou manter sua rota.
Redes Neurais
‘A solugao dada pelo homem no desenvolvimento
dos computadores modernos nao é baseada na Natu-
Enurad
Newb
Entradas
Figura 6 - © nourénio-elemento basico dos sistemas inteigentes
reza. Esta, para processar as informages criou os
neurénios, aglomerando-os posteriormente no que se
denomina de um sistema nervoso central com um
Ponto maximo que é 0 cérebro.
Nenhum inseto ou animal usa légica digital ou
coisa semelhante como ferramenta de
processamento de informagdes ou tomada *
de decisdes em lugar do cérebro.
Entretanto, o homem pode estar agora
se aproximando mais da natureza com
a.adocao de processadores que em-
preguem as mesmas solugdes
adotadas por ela, ou seja, basea-
das no comportamento elétrico do
neuronio (figura 6)
Diferentemente dos flip-flops e portas I6gi-
cas, 0s neurénios possuem uma certa flexibi-
lidade na resposta que dao aos impulsos que
08 estimulam, fato esse que torna um siste-
ma que os utilize muito mais facilmente
integravel com as condigdes do ambiente em
que ele opera, o que é uma exigéncia basica
da Natureza para a questao da sobrevivancia
da espécie
Empregando-se circuitos baseados
neurénios artificiais, ou seja, montando-se redes,
neurais, pode-se obter um comportamento diferente
dos processadores, muito mais proximo dos seres
vivos.
Desse modo, com base na Bidnica, estéo sendo
utiizadas redes neurais que nada mais sao do que
circuits que usam neurdnios eletrénicos. Estes nada
mais sao do que circuitos que tém 0 mesmo com-
portamento de um neurénio natural, conforme ilus-
tra a figura 8
‘Além dos neurénios possuirem uma faixa passante
de intensidades de impulso de estimulos que se des-
loca conforme 0 uso, 0 que permite-thes se adaptar
em
MECATRONICA FACIL Nis - MARCO/2001
Figura 7 ~ Neur6nio tipo “integrate and fre" usando ammpiticado-
res oparacionais,
as condigées de predominéncia de um tipo de esti-
mulo num ambiente, eles possuem uma caracteristi-
ca de inibigao.
Com intensidades de estimulo acima
de um certo valor, eles simplesmente dei-
xam de operar, negando os estimulos de
entrada
Redes complexas formadas por es-
tes neurdnios t8m levado os cientistas
a descobrirem que 0 aprendizado é
possivel, e mesmo a tomada de de-
cisdes nao programadas diante de cer-
tas condigdes de entrada. Isso leva a
ciéncia a falar em inteligéncia artifici-
al, uma vez que essas maquinas pas-
sam a ter as mesmas caracteristicas dos
seres vivos, a0 que damos o nome de
inteligéncia,
Nos laboratérios das grandes universida-
des como a USP, UNICAMP, UNB, etc., gtu-
pos de pesquisas que trabalham com redes
neurais e inteligéncia artificial tem obtido resul-
tados surpreendentes com equipamentos de uso
pratico.
Conclusdo
Nem sempre a melhor solugao para um problema
técnico precisa ser definida pelo homem. Na verda-
de, nem sempre a melhor solugao para qualquer pro-
blema téonico a que o homem encontra,
‘A Natureza com seu laboratério vivo, no qual tra-
balha hé milhdes anos, teve oportunidade de fazer
uma quantidade de experiéncias muito maior do que
a que podemos realizar durante toda a nossa vide.
Isso pode ter feito com que ela tenha encontrado 60-
lug6es ideais para muitos problemas com que agora
batalhamos.
Por que nao estudar as solugdes que a Natureza
encontrou para os problema antes de pensarmos em
adotar as nossas? Esta ¢ justamente a finalidade de
uma das mais interessantes das ciéncias, que 6 a
Biénica.
Bidnica na Internet
Future Horizons 6 uma empresa que comercializa
produtos biénicos. Dentre os produtos anunciados
com acesso no portal cujo enderego é dado a sequit,
destacamos uma roupa de guerra e um “andador” me-
nico que permitem que as pessoas caminham em
terrenos acidentados a uma velocidade de aproxima-
damente 50 quilémetros por hora.
http:www futureHorizons.ney
Links para Bidnica
No enderego abaixo, uma grande quantidade de
portais de Bidnica e assuntos correlatos podem ser
encontrados. Esses materiais versam sobre miscu-
los artificiais, centros de pesquisa, etc.
hitp://www.aleph.se/Trans/Individual/Body/
bion_page.htm!
Retina Artificial
No portal cujo enderego & dado a seguir, lemos
uma retina artificial alm de uma série de informa-
‘ges sobre 0 Cyborg” ou “Organismo Cibemético”, que
seria 0 organismo com partes artificiais imitando
as partes vivas ou um organismo vivo com partes
mecanicas.
http://online.sfsu.edu/~swilson/emerging/
artre332.bionics.htm!
Mais informagées sobre Bidnica podem ser encon-
tradas nesse portal da Design Matrix, uma empresa
da Califémia. Esta empresa projeta sistemas industri-
ais e produtos baseados em tecnologias avangadas
incluindo a Biénica,
http:/www.designmat nies!
Biénica no Brasil
Este portal, que é mantido pelo Dr. Orlando
Zoghbi, da Faculdade de Medicina do Para,
tem um setor sobre Biogénese e Bidnica,
em portugués, que merece ser visi-
tado. O enderego é:
http://www.informax
net.com.br/bionical @
aaerciLceite, ma
LINGUAGEM LOGO PARA ROBOTICA E AUTOMAGAO - 34 PARTE
COLETANDO SINAIS PELA
PORTA PARALELA
Luiz Henrique Corréa Bernardes
No artigo anterior descrevemos como controlar um LED através da porta paralela do PC. Neste,
veremos como checar, através desta mesma porta, se uma chave esta pressionada ou nao. A partir
de agora utilizaremos a atualizacao do software SuperLogo para a versao 3.0 que esta disponivel
pata download gratuito no site da Unicamp (http:/www.nied.unicamp.br) na secao “Publicagdes e
Software”
Porém, antes de
comegarmos a tra-
tar do tema propos-
to, analisaremos as
questdes que dei-
xamos em aberto
no final do ditimo
artigo.
QUESTAO 1
“Woes j4 sabe sal-
var @ carregar os pro-
gramas (procedi-
‘mentos) que fez?
Para salvar os
programas (que na
realidace S80 os nos-
sos procedimentos),
basta toclar om "Ar-
quivos" , depois teclar em *Salvar” na barra de
‘Menu e escolher uma pasta € um nome confor-
me 0 exemplo a figura 1. Com isso, salvamos
todos os procedimentos que estiverem abertos
dentro do arquivo CONTROLE.LGO. Da proxi-
ma vez que quisermos carregar os procedimen-
tos do CONTROLE.LGO, bastard teclar “Arqui-
vos “ e depois teclar em “Abir’ © escolher o nome
do arquivo, que no nosso exemplo é
CONTROLE.LGO.
MECATRONICA FACIL N? 3 - MARGO/2002
Figura 2 ~ Editando procedimentos
QUESTAO 2
Considerando que a janela “d1” flea sempre ativa,
006 jai usou 0 comando apaguejanela ? (dica: no nosso
programa tente apaguejanela “d).
Quando criamos uma janela no Logo, ela permanece
ativa até que soja enviado um comando de apaguejanela,
no nosso caso chamamos a janela de d1. Entéo 0 co-
mando serd, conforme sugerimos, apaguejanola “dt
QUESTAO 3
E fécil colocar mais um botao para
terminar o programa? Como se faz? .
Sim, € muito facil colocar mais um
oto em nosso programa, para isso,
basta ir alé “editar procedimentos”
(leclar “Procedimentos” ¢ depois em
*Editar") que aparecerd uma janela (con-
D:
°
0
1
1
emo
MECATRONICA FACIL N® 3 - MARGO/2002
forme figura 2) com todos os procedimentos que pode-
mos editar, ¢ escolher 0 procedimento control.
EntZo, iremos alterar o procedimento onde as letras
esto em negrito:
controle
aprenda
criejanela
catrénica F.
Controle] 10 10 150 75
erieestético “dl “LED [APAGADO]~
110 15 50 25
erisbotao “al "bl
[urea]
eriebotao “dl
“niga 10 10 40 20-
2 “Desliga 60 1a 40~
[DRSETGA]
“dl *b3 “Fim 10
apaguejanela “dil
‘Com isso 0 nosso programa iré assemelhar-se &
figura 3. Teste ¢ veja como ficou. Lembrando que para
executar novamente 0 programa bastard teclar “controle”
na barra de comandos.
QUESTAO 4
Como se faz para acender mais LEDs ?
‘A porta paralela tem disponivel um byte ( 8 bits, vooé
se lembra?) © na nossa montagem utllizamos somente
VALOR ESCRITO NA PORTA COMENTARIO
9 Todos as LEDs apagados
+ Somente LED Dg aceso
2 Somente LED Dy aceso
3 Todos LEDs acesos
‘Tabela 1 ~ Possivels coniguragses das saidas DD e D1 para acender dois Leds,
a
PROGRAMACAO
(Seida OPEN coletor)
i Riel yop
[no] ne] ww] A |-Sroxe]
ey
eu elect
tke
dois
ae
Note que as outras estao nos
registradores 379h (889 deci-
mal) ¢ 37Ah (890 decimal), que
sao registradores de controle
da porta paralela. Essas linhas
sao de entrada e de saida.
No nosso caso vamos util
zar somente a linha de "Faull,
que é uma linha de entrada
‘onde iremos conectar uma te-
cla conforme o esquema elé-
| trico dado da figura § © mon-
| tagem ilustrada na figura 6.
Quando a tecla nao estiver
| pressionada, iremos ter nivel
l6gico 1, o que ird corresponder
| a bit 1 no bit “Fault” do regis-
trador379h (889 decimal), Ago-
4 6 0: [ba] 03] 02] s] 0] ee eer aren es
5 aait iremos ter nivel l6gico zero na
14 (Saida TTL) linha de “Fault” e zero no bit de
“Fault” do registrador 379h (889
[ _ (Entrada) decimal).
[ey nox Peso Faar] wu] wu] wo 3 Saar
= s ‘S7AH
Nac utiizedo
Figura 4 — Representagio 60 port 78h.
© bit DO no qual quando escrevemos 1 0 Led acende, @
quando escrevemos 0 0 Led apaga. Para colocar mais
um Led, basta adicionar mais um circuito de acionamento
em vez de conectar em DO , devernos conectar em D1
Agora para ligar/desligar os Leds teremos que utilizar a
tabela 1
COLETANDO INFORMAGOES
‘Agora que ja analisamos as quest6es, abordaremos
tum assunto novo que é manu-
sear entradas que, em conjun-
to com o manuseio de saidas,
nos permitira fazer varias +]
automagdes |
Nés vimos anteriormente
que para acender um Led ti-
nhamos que escrever no port
378h (888 em decimal). Na
figura 4 mostramos uma repre-
sentago desse portem forma-
to de byte dividido em bits
‘suas conexdes com a porta
paralela.
As linhas DO a D7 represen-
tam as linhas de dados do
conector da porta paralela.
42
Figura § ~ Esquema elétvico. Note que fol acrescentada somente a chave ao esquema anterior.
tecla e sabemos como identi-
ficar se a tecla foi
da ou nao.
TESTANDO A CHAVE COM
© SUPERLOGO
Conecte na porta paralela a placa sem as pilhas, pois
‘as mesmas séo necessérias somente para acender o LED.
No LOGO, iremos utilizar 0 comando “portaentadab’
Se formos até “Ajuda” do Superlogo, teremos a descri-
‘G0. do comando como:
Portaentradab id_da_porta
Esse comando ira ler 1 byte (caractere) da porta
especificada em id_da_porta e retornd-lo com um inteiro.
[foo ko
Chave
T
MECATRONICA FACIL N° 3 - MARGO/2002
ie PROGRAMACAO
a
Observe que o bit “Fault” esta
0 i f 1 1 ° 0 ° com 1. Agora se executarmos 0 co-
‘+Busy -Ack +Paper +Selln -Fauit Nao Nao Nao mando novamente com a tecla
End vtlizado utilizado utilizado pressionada, teremos o valor 112
que em hexadecimal ¢ 70h e em
. binario € 01110000. A tabela 3 ilus-
Tabela 2 Sobreposico do valor bao em cima do censor 370, sem presslonar a tec’ tra sobreposigao deste sobre o
ae registrador 379h.
Note que, desta vez. 0 bit
5 fi 4 a a @ ° “Fault” esta com zero. Agora voos
Busy -Ack Paper +Solin -Fault Néo Nao. Nao devergslaelpepeandes
End utilizado utiizado vitilizedo Eu sel que quando eu aciono o
LED preciso executar apenas uma
vez 0 comando ‘portasaida 888
“Tabela 3 - Scbreposigdo do valor inério em cima do reqsrador 379h, com a teclapressionada. 1" , mas para saber se a chave
pi Sa 3 esta pressionada ou no, tenho que
executar varias vezes 0 comando ‘portaentradab 889",
pois em dado momento a tecla pode estar pressionada e
noutro nao. Para solucionar esta questo, contaremos
com um poderoso recurso do LOGO, que é 0 temporizador,
que executa um procedimento na freqdencia de tempo
que estipularmos. Por exemplo, se estipularmos uma
temporizagao de 200 milissegundos (1/5 de segundo) para
fazer a leitura da chave, ento a cada 200 milissequndos
© procedimento de ler chave sera executado. Para enten-
der melhor este comando, vamos modificar © nosso pro-
cedimento de controle para:
aprenda controle
sei eterporizade 4 200
Solegenel: “eeknWesl (loca
Pence eon nee Pécil ~ Controle] 10 10
ca ee 170 75
O rdidarportaepeeca lina ponide ariwarc' Na “ear asco. *41 “tet! laeAenao antl
confunda esse comando com Abraporta
Leiacaractereporta, que so para comunicacao via portas
Serial e Paralela. Veja também Portaentrada e Portasaidab.
id_da_porta: (INTEIRO) Especitica de qual porta de
hardware vooe deseja ler.
Em outras palavras, esse comando lé a porta
especificada e retorna o valor lido na forma de um
caractere (byte), ou seja, 08 nossos 8 bits ! Entdo, va-
mos ver como funciona:
‘Sem a tecla da placa estar pressionada, execute 0
comando abaixo na janela de comandos:
orleesta
9 “dl “TEXTO
44 50 25
erieestatico “dl *TRCLA
‘44 60 25
criebotdo “dil “bl “Liga 10 10 40 20~
(urs:
criebotdo “dl “bd “Deslic:
20 [DESLIGA]
iebotao “di
[anaguejanela “*al~
desativetemporizador 1)
10 40 40 20
fin
mostre portaentradab 889 Fa
- i criar um novo procedimento de verificar a chave:
© SuperLogo ird mostrar 0 valor 120 que em
hexadecimal 6 78h e em bindrio ¢ 01111000. A tabela 2 ee
‘exibe a sobreposigao do valor bindrio em cima do regis- dese tiy coer
eee atribua “chave portaentradab 889
atribua ‘chave bite :chave 8
senda :chave - 0 [mudeestdtico-
© "~" no final de uma linha significa que a li- "TEC STONADAT }~
nha foi quebrada, ou seja, a linha de baixo faz [mideastatico “PECLA (SOLTAI]
parte do mesmo comando. ativetemporizador 1 200 [VACHAVE]
fim
MECATRONICA FACIL Ne 3 - MARCO!2002 43
PROGRAMAGAO
==
eee
ae
Figura 7 ~ Tela do programa
além de utilizar 0s procedimentos LIGA e DESLIGA que
fizemos no artigo da edicao anterior.
Nao se esqueca de salvar todos os procedimentos,
pois quando utilizamos 0 temporizador temos que ter
muito cuidado, visto que se progra-
marmos algo errado poderemos per-
der 0 controle do programa, veja a
‘em “Ajuda’ a descrigao do coman- gor oF
do “ativetemporizador ne
Nesse ponto é s6 colocar as pi- i
Ihas e testar esse novo procedi-
mento “controle”, € ver o que acon-
tece. Se tudo estiver certo, iremos
ter uma tela parecida com a mostrada na figura 7; caso
contrario, verifique se vocé efetuou corretamente os pas-
0s que descrevemos. Agora, toda vez que apertarmos
a chave apareceré 0 texto de “TECLA PRESSIONADA’,
e quando soltarmos, 0 texto “TECLA SOLTA" ira ser es-
crito na janela do programa. Mas, como funcionam os
comandos novos que utilizamos no procedimento
“vechave"? Vamos ver:
desativetemporizador 1 - desativa o temporizador
1. Teoricamente nao seria necessario colocé-lo, mas para
efeitos de depurar 0 programa (passo a passo) é reco-
mendavel fazé-lo,
‘Tabela 5 ~ Logica da Operacdo “E
pe
a
atribua “chave portaentradab 889 - Aqui, estamos
criando uma varidvel chamada chave e atribuindo 0 va-
Jor lido na porta 889 em decimal ou 379 em hexadecimal.
atribua “chave bite :chave 8 — Esse comando atri-
bul o valor @ varidvel chave com o resultado da operacao
légica “E” entre o valor inicial de chave (lido na porta
paralela) © o valor 8. Fazemos isso para “isolar’ o valor
do bit correspondente a nossa chave. Para ficar mais
claro, vamos exemplificar a operagao “E” utilizando a
tabela 4, onde lemos 0 valor da porta paralela (120 em
decimal e 78 em hexadecimal). A tabela ilustra o resulta-
do da operagao.
A operagao “ E * 6 feita bit a bit e obedese a légica
exibida na tabela 5.
Resumindo: se um dos valores for "zero" o, resulta-
do serd “zero” independente do outro valor ser “umn”, com
isso conseguiremos ‘isolar” o bit que queremos verificar.
No nosso caso, se o bit false estiver em 1 (teva solta), 0
resultado da operacao sera 8 conforme a tabela 4, @ se
estiver apertada, 0 resultado sera “zero”.
sendo :chave = 0 [mudeestético “TECLA [PRES-
SIONADAI] [mudeestatico “TECLA
[SOLTA]] - Aqui temos um coman-
do de decisio. Se o contetido da
chave for igual a “zero”, ser execu-
¢ tado 0 procedimento_mudeestatico
# “TECLA [PRESSIONADA]; caso
contrario serd executado 0 procedi-
mento mudeestatico “TECLA
[SOLTA].
ativetemporizador 1 200 [VECHAVE] - Aqui ativa-
mos novamente 0 nosso temporizador com interval de
200 milissegundos ¢ a cada intervalo deste sera execu-
tado 0 procedimento VECHAVE.
Voc notou que 0s nossos programas esto ficando
mais complexos? Recorda-se que tudo comegou com 0
desenho de um quadrado pela nossa tartaruga?
Com isso, pode perceber que para fazer um progra-
ma complexo (ou quase!) nds o dividimos em varias
‘tarefas Ou procedimentos (no nosso caso LIGA, DESLI-
GA e VECHAVE). Voc8 deve ter notado também que tes-
tamos cada procedimento e coman-
do independentemente e, com isso,
eda “eens Fein ea ree. ee | conseguimosjentender -analisar
vee . 7 : Fi 7 a de uma maneira mais facil seu fun
Gon cionamento. De uma maneira que
oe talvez néo tenha percebido, nds fi-
: . ~ zemos uma depuragao do progra-
. " " , a , ma e da nossa placa. Mas, o mais
Tabela 4 — Resultado da operagdo “E* entre 0 valor ido na porta © 0 niimero 8.
46
importante de tudo, é que dividimos
‘nosso “grande” problema em “pe-
quenos’ problemas. Podemos en-
tender melhor se analisarmos 0 flu-
xograma do nosso programa na fi-
__ gura 8.
MECATRONICA FACIL N?3 - MARGO/2002
Figura 8 — Flxograma do programa desenvalvio.
Note que o fluxograma nao so os comandos, mas
sim a descrigao simplificada do nosso programa ou do
que queremos que ele faca.
Vocé deve estar se perguntando: “Mas porque eles
estao me falando dessas coisas “chatas"?
Concordamos que 0 assunto 6 chato, mas muito
importante, pols quando entendemos o problema, fica
mais facil de programar e de depurat 0 programa, seja
pelo proprio autor ou por outra pessoa. Isso significa que
sempre devemos nos preocupar com a documentagao
de nossos programas e projetos, com a descrigao do
que ele faz, as rotinas que ele tem, fluxogramas, dese-
hos, fotos entre oultras coisas que possam nos ajudar a
“lembrar’ 0 que fizemos. Imagine, por exemplo, daqui a 6
meses vocé rever 0 procedimento de VECHAVE e se
perguntar:
Porque eu utilzei § no comando atribua ‘chave bite
cchave 8 @ nao 16? Serd que 8 € 0 valor correto?
Vocé sabe qual é 0 melhor momento para se fazer a
documentagao do programa ou projeto?
‘Se respondeu no final, talvez nunca a faga, pois
sempre haverd outra coisa a ser realizada mais int
ressante do que documentagao ¢ ela sempre sera
deixada de lado. Entdo, 0 melhor momento para docu-
mentar um projeto é durante a sua exeougao, porque
as informagdes estao nascendo “fresquinhas” na sua
mente.
Bem, estamos finalizando mais um artigo desta sé-
rie. Conseguimos controlar um LED e saber se uma te-
cla esta pressionada ou nao, e entendemos a importan-
cia da documentacéo. A partir da préxima ediga0 inicia-
remos um projeto de Automagao. Enquanto voce aguar-
da, tente fazer:
MECATRONICA FACIL N* 3 - MARGOI2002
ROGRAMACAO
1- Um programa onde:
Pressionando a chave na pla-
‘0a, acende 0 LED, e quando
soltamos 0 LED apaga. Nao
vale ligar com fio a chave di-
retamente no LED!
2. Um programa onde eu
pressiono a chave na placa e
‘© LED acende, ¢ quando sol-
toa chave 0 LED pemanece
aceso; se eu pressionar a
chave novamente, 0 LED se
apagara e assim sucessiva-
mente
Salientamos novamente
que esta disponivel o forum
da revista (http:/www.me
catronicafacil.com.br) para
qualquer divide ou esclareci-
mento.
Boa diversdo e até a
proximal .
Atengdo!
Faga a montagem com muita atengao, pois li-
gacdes erradas podem causar danos irreparaveis
ao PC.
Porta Paralela no Windows 2000 ¢ NT
© acesso a Porta Paralola no Windows 2000 e
NT sao feitos por drivers especiais e nao por
enderecamento como no Windows 95 / 98, por-
tanto os comandos de acesso a portas para leit
ra ou escrita quando executados pelo Logo iro
gerar erro.
45
an eter 8
a
AUTOMAGAO PNEUMATICA - 3* PARTE
A TEORIA DO
AR COMPRIMID
este artigo iremos abor-
dar de forma mais abran-
gente a “Teoria do Ar
Comprimido”
Para aqueles leitores que, por qual-
quer motivo, perderam a primeira edi-
(G40 desta revista, achamos por bem
fazer uma recordagao de alguns top
cos, expandindo-os um pouco mais.
Sendo assim, trataremos de:
~ A composic&o do ar;
- Algumas informag6es sobre sua
"geragao";
~ Tabelas de converséo;
- Exemplos do custo do ar com-
primido.
Este ultimo tépico sempre foi
‘muito importante, porém comegou a
fornar-se importantissimo depois das
noticias sobre 0 “apagao” relaciona-
do a reduc&io do consumo de ener-
Gia elétrica, onde aparecem o(s) com-
pressor(es) de ar comprimido como
ices" desta histéria.
A *Redugao de Custos’ seré assun-
to de futuros artigos, mas julgamos im-
pportante dar uma introducao ao tema,
para que todos aqueles que se interes-
sam em aprender um pouco sobre
“Aulomago Pneumdtica’ tenham sem-
pre em mente esses custos, ou melhor
dizendo, essas “despesas”
Iremos demonstrar de que for-
ma podemos reduzir esses custos,
aumentar a produgao, melhorar a
qualidade do produto final, diminuir
os indices com a manutengao de
equipamentos, enfim, tudo aquilo
que um técnico em ar comprimido
tem por obrigagao saber obtendo
beneficios desse conhecimento.
46
José Carlos Amadeo
‘Vamos |, porém, antes disso um
pouco de teoria
TEORIA DO AR COMPRIMIDO
Um pouco de conhecimento
sobre nossa atmosfera
Depois que a crosta do nosso pla-
neta solidficou-se, ele foi circundado
por hidrogénio. O suprimento de hidro-
genio a partir do magma cessou quan-
do a crosta endureceu. Assim, parte
do hidrogénio desapareceu no Univer-
‘SO € 08 gases como aménia 8 vapor
de Aqua transformaram-se em nitro-
génio e oxigénio, por fotossintese.
Dessa forma, foi criada a nossa at-
mosfera dos dias atuais.
‘A camada mais préxima, que vai
do solo até uma altura aproximada de
12 Km., 6 chamiada de Troposfera -
(vide figura 1 ). Nela, encontramos
08 varios tipos de gases ( como o géis
oxigénio e 0 gs carbono) . Os ven-
os, as nuvens, a neve , a chuva ,
tempestades, trovoadas ¢ 0s raios, se
formam nesta regido. A temperatura
iminui com aumento da altitude. Aci
ma desta camada, encontram -se a
Estratosfera e a Mesosfera. Na Es-
tratosfera quase ndo hd oxigénio: o ar
6 mais rarefeito e as temperaturas S40
muito baixas, em média de - 50 C.
Essa regido ¢ livre de nuvens e tor-
mentas, onde navegam os avides a
jato, porno existir perigo de "mau temn-
po’. Os seres vivos ndo sobrevivem
nesta regido, devido a baixa tempera~
tura - (0 gas predominante é 0 nitro-
génio ). A proxima camada é a
Mesostera, que se estende até cerca
de 80 Km de altitude, com temperatu-
ras mais baixas, chegando a - 120° C -
ccondutora de eletrcidade e reflete as on-
das de rddio - importante camada para
pesquisas meteorologicas. A proxima
camada é a Termosfera, que alcanga
cerca de 640 Km acima da superficie
terreste. Esta camada recebe 0 nome
de Termosfera porque sua temperatura
aumenta com a altitude, chegando a
mais de 1000 °C. , © é nesta camada
‘que enconitramos os meteorites, que sé0
‘corpos rochosos ou metalioos que vem
do espago césmico. E a citima camada
aimosférica é chamada de Exosfera,
onde o ar é extreriamente rarefeito. Ela
se inicia a uma altitude de cerca de 500
Kin. e vai até 1.000 Km de altitude apro-
ximadamente - Nesta camiada temos ©
limite entre a atmostera e 0 espago cés-
mico, onde as forgas de gravidade de
nosso planeta S40 reduzidos a tal ni-
MECATRONICA FACIL N° 3 - MARGO/2002
vel que os atomos ¢ moléculas com
velocidades suficiente podem desa-
parecer no Universo. A tabela 1 mos-
tra altitude destas camadas,
‘Apenas como curiosidade, o gas pre-
dominante na Exosfera ¢ 0 gas Hidro-
genio , com temperaturas que durante 0
dia chega a utrapassar os 2.000°C , e
a noite cai para cerca de- 270°C. ea
pressao atmosférica é muito baixa,
‘bem menor do que a pressdo na su-
perficie terreste. Por isso, para trafe-
gar nessas camadas, os avioes tém
seu interior pressurizado, hermetica-
mente fechado @ a presséio em seu
interior é mantida semelhante & pres-
sao da superficie terrestre, garantin-
do que o ar tenha uma presséo ade-
quada a respiragao dos passageiros.
Oar
ar € um gas incolor, inodoro &
insipido. E uma mistura de varios ou-
{ros gases individuais. Uma estimati-
va mais cuidadosa prevé 15,17.10
kg para a massa total de atmosfera
que circunda o nosso planeta. Essa
massa 6 um pouco menos da milio-
nésima parte do planeta. A composi-
‘co do ar permanece relativamente
constante desde 0 nivel do mar até
uma attitude aproximada de 20 km,
Propriedades do Ar
- O ar que respiramos é elastico
© compressivel.
MECATRONICA FACIL N° 3 - MARGO/2002
‘Termosfera 640 km
Mesosfera 80 km
Camadas Gasosas da Atmostera
Exostera, do 640 km a 3,000 km
{do 80 krn a G40 ken
ide 30km a 80 km
ido 12 km 4.35 kin
ron KM A 11 Kr.
Termostora
Mosostera..
Estratostora
Tropostera,
‘Tabela 1 — Alttude das camadas
aimostericas.
- Ocupa todo espago onde esta
contido,
~ E composto principalmente por
nitrogénio e oxigénio:
~ A tabela 2 mostra a compos!
0 do ar.
‘A nossa atmosfera ndo contém
somente gases, mas também uma
mistura de particulas solidas, tais
como: poeira, areia, fuligem e cris-
tais de sais. Nas grandes cidades 0
nimero destas particulas pode alcan-
‘gar 500.000 por m°.
Nos cumes das montanhas mais
altas nao sao encontradas essas
particulas, mas 0 ar nesses locais,
entretanto, é poluido por poeira cos
mica, E estimado que cerca de 14
milhdes de toneladas de poeira c6s-
mica atingem a Terra a cada ano.
Como 0 ar é uma mistura mecani-
ca e nao uma substancia quimica,
Nitrogénio 73.00% Ne
Oxigénio 205% Oe
‘Asso 0.9% Ar
Digxio de Cartono 0.03% — (")
(entre autros indmmoros gases
Tabela 2 ~ Composigao quimica do ar.
Figura 1
‘seus componentes podem ser sepa-
rados. Isso ¢ feito normaimente por
resfriamento do ar -196%C a partir do
gue os varios componentes séio se-
parados por destilagao fracionada,
Dos constituintes que compoem o a,
somente 0 oxigénio e o nitrogénio s20,
necessérios & vida. O oxigénio é ne-
cesséirio para suportar os processos
de metabolismo pelos quais nosso
corpo converte os carboidratos, as
proteinas e as gorduras contidas nos
nossos alimentos, em calor e ener
gia. Em média, uma pessoa conso-
me aproximadamente 740 | de oxigé-
nio (que igual a 1 kg de oxigénio) a
cada 24 horas. O peso do oxigénio
consumido é, dessa forma, pratica-
mente igual ao peso ds alimentos con-
ssumidos durante 0 mesmo periodo. O
nitrogénio que nés respiramos ndio tem
fung&o metabdlica, mas serve como
diuente inerte, e mantém inflada, cer-
tas cavidades do corpo com 0 gs, tas
como os alvéolos pulmonares, © ouvido
médio e as cavidades do sinus.
A tabela 3 mostra as mais im-
portantes constantes fisicas do ar.
Pressao atmosférica
A pressdo atmostérica 6 medida
pelo peso do ar que esté acima de
nds. Ela 6 menor quando estamos
no topo de uma montanha e maior
quando estamos em uma mina.
A pressao atmosférica padrdo &
definida pela “Organizacao Civil In-
47
Pose molest
idade do gas a 15°C 0 1 ba
Pomio de ebulicao a % bat
Fomperatuita ertica
Tatela S - As mais imponantes constantes ‘isicas do ar
4 mim Hg ore
780 Torr vacuo absoluro
Toe 0.0979 mbar
0 Torr vacuo plenio
Tabola 4 - Para medidas no vacuo
ternacional de Aviagdo”. A presséo
a temperatura ao nivel do mar sao,
1013,25 milibar absoluta ¢ 288 °K
(15 ® C), respectivamente.
A pressao atmostérica pode ser
medida pela altura da coluna do
liquido no vacuo. No caso da gua,
0 tubo do bardmetro de agua pode-
ria ter 10 metros de comprimento,
O meretirio (Hg) é 13/6 vezes mais
denso do que a agua e, por isso, um
barémetro de mercirio ndo requer um
tubo to alto. A tabela 4 ilustra alguns
valores de medidas no vacuo.
Atmostera e Vécuo
A forga da pressao atmostéri
ca 6 utilizada em sistemas ma
nipuladores com ventosas de v
cuo e em sistemas de maquinas/
equipamentos de pegas forma-
das por vacuo (vaccum forming).
Unidades de Pressao
A unidade mais utiizada em sis-
temas de ar comprimido (e definidas
pelo Sistema Internacional de Medi-
das = SI) para 2 pressao ou tensao
mecénica € 0 Pascal (Pa). A tabela
5 apresenta algumas equivaléncias
de valores,
UNIDADE DE FORCA - SISTEMA
INTERNACIONAL DE
UNIDADES (SI)
As forcas sao indicadas em
Newton (N), que é uma nova unida-
de para indicar forgas (antes Kp),
48
conforme 0 SI (System International
Unites)
© Newton é a forca que, agin-
do sobre um corpo de massa
igual a 1 kg, Ihe atribui a acele-
ragdo constante de 1 m/s*na di-
regao da forca.
Dado que: forga = massa x velo-
cidade, temos:
4N = 0,102 Kp ; 1 Kp = 9,81 N~
10N
Para faciliiar esta troca de unida-
de, 20 lado do valor em N é indicado
também o valor correspondente em Kp.
Com 0 arredondamento da formula (1
Kp = 10Ne1N-=0 Kp), na praca
pode haver uma variagao de 2%,
REGRAS DE CONVERSAO
Para operar com unidades deriva-
das do Sistema Internacional (Sl),
‘seus miiltiplos e submiitiplos, ou
ainda saber os valores de medidas
‘em outros sistemas, basta procurar
‘suia definigao ou consultar a tabela
de prefixos. A tabela 6 apresenta al-
guns exemplos de conversao, e a
mostra alguns fatores de conversao
para escelas de temperatura
QUALIDADE DO AR
COMPRIMIDO
A qualidade do ar comprimido
depende muito da qualidade do ar
atmosférico admitido pelos com-
pressores. A ar atmosférico admi-
tido deve ter as seguintes caracte-
risticas
1- Seco
2- Limpo
3- Baixa temperatura.
AR ATMOSFERICO SECO
O ar atmostérico depende da lo-
calizacao geogratica da empresa.
Existem locais onde 0 indice de
umidade relativa do ar é muito ele-
vado e, consequentemente, o ar
‘comprimido teré uma quantidade ele-
vada de condensado (agua con-
densada). Para esses casos deve-
se buscar as solucdes mais adequa-
das para a eliminacdo desse
‘condensado.
A temperatura do ar atmosférico
a umidade relativa do ar contribu-
em, muito para o surgimento da Agua
condensada no sistema de ar com-
primido. Dessa forma, a eliminacao
do condensado devera ser, em prin-
cipio, de forma mecanica (purga-
dores) € a mais eficiente possivel
Dependendo do grau de qualidade que
se necessite, existem secadores de
ar comprimido eficientes e de capa
cidade adequada.
© primeiro passo para a elimi-
ago do condensado esta na efici-
éncia do resfriador posierior
(aftercooler). Deve-se veriicar se 0
mesmo nao esta subdimensionado,
se a pressao da agua da refrigera-
do é adequada, pois a presséo ira
influenciar na velocidade da agua no
interior do restriador posterior. Lem-
bre-se que alta velocidade nao per-
mite uma boa troca de calor. Deve-
se verificar se a dgua de refrigera~
‘90 6 tratada ou ndo. Quando nao tra~
tada ou inadequada, ira criar
incrustagdes de minerais, iodo, etc.
formando uma isolacdo térmica que
1660)
90000 Pa = 100 KPa » 145 pst
ne
Giviehaso basica Pa = 1 Nmé (1 bar
1 bar = 105Pa
Pa = 0 000tibaF
psi 0,089 bat
mon Hg 7.934 mbar)
mm Hed = nbar
(CNatores aproniniadss
Tabela 5 ~ Algumas converstes de medida de pressao.
MECATRONICA FACIL NF 3 - MARGO/2002
mm =9, 001m
mm? = 0. 0,001
1 polegatia =2.5:
Polegadas quadradas en
Polegada x polegada
‘em tem polegada quadrada:
fom
03m
100m x
2.800 dene
2.54 om = 6.45
tom = 12.54 = 0.8937
3997 x 0.9907 = 90,1549 polegadas®
m=0.3mxm=03
000 om em = 3.
00
femms2500.dmxdm x dm » 2500
xO,t mx 0.4 = 25a
mis 20 (1.000
some tah 0 (42.5) km (glgs)h =
10h be 990)
a6 km
‘Tabela 6 ~ Exemplos de corverséo.
nao permitiré uma eficiente troca de
calor entre 0 ar comprimido © a agua
de retrigeragao. Assim, 0 ar compri-
mido ira sair do resfriador posterior
ainda com alto teor de umidade. Essa
umidade indesojavel iré se condensar
mais para frente na rede de distribui-
0 € nos pontos de consumo do ar
comprimido.
© segundo passo é 0 res-
friamento do ar comprimido no pul
mao (reservatorio). Temos eneontra-
do inimeras vezes temperaturas que
variam de 40? C a 50° C. Verdadeiros
absurdos. Os pulmoes tém como um
de seus objetivos permitir a troca de
calor entre 0 ar comprimido e 0 meio
ambiente que o cerca. Essas altas
temperaturas podem ser provenien-
tes da temperatura da sala do com-
pressor (freqiientemente 0 compres-
Sor esia proximo a caldeiras ou ou-
{ras fontes de calor), ou ainda da de-
ficiéncia de ventilagao na sala do
compressor, ou da ineficiéneia do
restriador posterior, ou da proximida-
de entre © pulmao © 0 compressor,
ou 0 compressor operando com
Fanrenhe
Kelvim para Fahrenheit
Fane
95 4 255
Tabela 7 - Escalas de temperatura
MECATRONICA FACIL N° 6 - MARCO!2002
elevadas temperaturas e com defici-
éncia de refrigeragao.
Muitas vezes também, os pul-
modes estao expostos as irradiagoes
solares e isso faz com que suas pa-
redes tenham elevadas temperatures,
no permitindo assim a boa troca de
calor para condensar o maximo pos-
sivel da agua existente no ar compri-
‘mido antes deste ir para a rede de dis-
tribuigao. © ideal é cobrir os pulmBes
‘com um telheio simples, com boa ven-
tilagao, evitando-se elevadas tempe-
raturas nas paredes dos mesmos.
O terceiro passo para eliminar 0
condensado na rede de ar comprimi-
do sao os separadores de con-
densado e os purgadores. Os mes
mos devem ser adequados e bem
dimensionados,
AR ATMOSFERICO LIMPO
O ar atmostérico deve ser o mais
impo possivel, isto é, isento de par-
ticulas sélidas e gases écidos. A po-
luicdéo ambiental é extremamente pre-
Judicial ao ar comprimido,
As partioulas sélidas_ficam
retidas nos filtros de admissao (# 3
mm a #20 mm), mas nem sempre
os mesmos conseguem reter as par-
ticulas menores, as quais acabam
passando para o interior do compres
sor e fluindo com o ar comprimido
até os filtros das linhas de servico.
Nos compressores de parafusos as
a
particulas, dependendo das dimen-
ses, ficam retidas no fro separador
arléleos. AS particulas, se muito pe-
quenas, passam e podem ser retidas
no filtro do Gleo. De qualquer forma,
as particulas acabam comprometen-
do 0 sistema, tanto para compresso
res de pistZo como para os compres-
sores de parafusos. O excesso delas
reduz a vida util dos fitros e eleva 0
custo de troca e manutencdo.
maior problema sao 05 gases,
pois estéo intimamente ligados com
© ar atmosférico @ néo ha como
elimind-los de forma simples e a bai-
xo custo, Os piores gases sao os
cidos, pois corroem as partes me-
talicas do compressor, do restriador
posterior, dos pulmées, da tubulacdo,
dos acessérios (fittros, requladores
de pressao e lubrificadores), valvu-
las, cllindros, ferramentas pneumé-
ticas, equipamentos, etc.
Através da andlise da agua
‘condensada no ar comprimido, é pos-
sivel saber se o ar atmosférico esta
contaminado de gases acidos, e as-
sim buscarmos uma solugéo para 0
problema,
AR ATMOSFERICO COM
BAIXA TEMPERATURA
A temperatura do ar atmosférico
deve ser a mais baixa possivel, pois,
com temperaturas menores tem-se
uma melhor relagéo entre a massa
de ar atmosférico e 9 volume de ar
admitido pelo compressor. A massa
de ar é de grande importancia para 0
ar comprimido, principalmente o uti
lizado em processos (refinarias,
aciarias, etc.) onde a massa do ar
comprimido faz parte do processo.
Oar atmosférico com baixa tem-
peratura na admissao do compres-
sor contribui para minimizar 0 con-
densado no resfriador posterior &
no pulmao (reservatério), bem co-
mo permite ao compressor uma
vida util maior,
OUTROS FATORES QUE INFLU-
EM NA QUALIDADE DO AR
COMPRIMIDO
Altas temperaturas provocadas:
pelos compressores, devidas aos
49
sistemas de refrigeragao, inade-
quagao do uso dos mesmos ou por
outras causas, diminuem a vida Util
do dleo de lubrificagao atetando
sua viscosidade, tornando-o a-
cidulado, ocasionando o surgimento
de particulas metalicas como tam-
bém o aparecimento de particulas
carbonizadas.
Gleo lubrificante do compres-
sor perdendo sua viscosidade, isto
6, tormando-se fluidico, provoca 0
vazamento pelas juntas e pelas val-
vulas de descarga nos compresso-
res do tipo pistao. Sua acidez ataca
as paredes do reservatério do éleo,
nas camisas dos cilindros, nas val-
vulas de admissao e nas valvulas de
descargas.
Nos compressores do tipo para-
fuso 0s dcidos atacam os rotores
desgastando as superticies, perden-
do a vedacao e conseqilentemente
a eficiéncia. Esses dcidos atingem
também todos os equipamentos ins-
talados na rede de ar comprimido.
6leo queimado torna-se pasto-
50, aspero e abrasivo e é extrema-
mente prejudicial, aumentando subs-
tancialmente os custos de manuten-
40. A pasta de dleo e as condigdes:
desfavordveis provocam o sur-
gimento dessas particulas carboni-
zadas que, com o decorrer do tem-
po, comegam a obstruir as tubula-
es, danificar as vaivulas dos com-
pressores, prejudicar os sistemas de
‘roca de calor nos resfriadores pos-
teriores, obstruindo a passagem do
ar comprimido.
Muitos pensam que o éleo ge-
rado de compressor (existente na
rede de ar comprimido) iré lubrifi-
car as ferramentas pneumaticas,
entre outros equipamentos. Na
verdade, este deo acidulado, com
excesso de particulas carboniza-
das, iré, como jé foi mencionado
anteriormente, prejudicar todos os
equipamentos pneumaticos.
Outro fator importante esta nos
tubos galvanizados, cujas particu
las carbonizadas, mais 0 excesso de
gua condensada, e o mau dimen-
sionamento das tubulagdes, provo-
cam um aumento da velocidade do
ar comprimido, ampliando dessa for-
ma 0 atrito interno, desgastando a
50
Eien mi
camada de zinco protetora dos tu-
bos, causando a corrosdo dos tubos
e surgindo as particulas ferruginosas,
que so arrastadas pelo fluxo do ar
comprimido, comprometendo todos
08 equipamentos que iréo receber
este “ar contaminado”.
COMO ADMINISTRAR O
CONSUMO DO AR COMPRIMIDO
Para gerenciar eficazmente 0 sis-
tema de ar comprimido ¢ de relevan-
te importancia se conhecer:
1. A vazao teal de cada com-
pressor e 0 seu rendimento (capaci-
dade total de geracdo)
2. O consumo de ar comprimido
por ponto de consumo, por area e o
total.
3. © consumo total por vaza-
mentos (desperdicios)
Temos que entender que a ad-
ministragao do sistema de ar com-
primido 6 semethante a um livro
contabil, pois se deve registrar 0
que entra e 0 que sai. Na instala-
40 de um novo dispositivo ou de
um novo equipamento deve-se re-
gistrar 0 consumo do mesmo e sub-
trair do valor gerado conhecido.
Assim tem-se um acompanhamen-
to do consumo e do ar comprimido
disponivel no sistema,
Pouquissimas empresas tém uma
administragio e monitoragao eficien-
te do sistema de ar comprimido, o
mesmo nao ocorrendo com o siste-
ma elétrico e com o sistema de vapor.
A empresa deve conhecer 0 con-
‘sumo de cada pento de ar compri-
mido, bem como a pressdo neces-
séria para maximizacao do proces-
0 produtivo.
Normalmente, ocorre 0 acréscimo
de novos pontos de consumo de ar
comprimido sem levar em conta qual
6 a capacidade real total de geracao
€ 0 consumo total. Assim, o sistema
de ar comprimido acaba ficando
subdimensionado, pois na medida em
que se vai acrescentando novos con-
sumos, como conseqliéncia, ocorre
‘a queda de pressao no sistema
Quando a pressao de trabalno
estd inadequada, abaixo da
especificada no projeto, um cilindro
pneumatico torna-se mais lento e,
dessa forma, aumenta 0 tempo de
operagao resultando em queda de
produtividade. Existem equipamen-
tos @ valvulas que nao operam com
press6es inferiores para as quais fo-
ram projetadas, causando queda na
produtividade. Por outro lado, o me-
nor volume de ar comprimido no sis-
tema provoca quedas de pressao.
Todo sistema pneumatico, com a
queda de pressdo, fica compromet
do e ineficiente, recaindo a ‘culpa’
‘sobre 0s dispositivos pneumaticos.
Olha-se 0 efeito e nao a causa da
deficiéncia
‘Quando 0 consumo de ar compri-
mido se aproxima do gerado pelo(s)
‘compressor(es), deve-se tomar me-
didas preventivas para evitar que 0
sistema entre em colapso, medindo-
se 0 consumo em cada ponto atra-
vés de procedimentos normalizados,
e administrando 0 consumo parci-
al © global. Este poderia ser cha-
mado de “um segundo passo para
a administragéo do consumo de ar
‘comprimido”
VAZAMENTOS E DESPERDICIOS
Os vazamentos 08 desperdici
(5 encontrados na maioria das em-
presas que utiliza 0 ar comprimi-
do, além de comprometer a funcao
dos equipamentos instalados, ira ele-
var os custos operacionais.
Todos os compressores S80 aci
nados por motores elétricos, portan-
to os vazamentos provocam 0 des-
perdicio de energia elétrica, gastan-
do-se mais energia para comprimir 0
ar atmosférico e posteriormente
devolvé-lo para a atmosfera sem rez
lizar qualquer trabalho. O desperdi
cio de energia vem acompanhado
pela redugao da vida ttl do leo lu-
brificante, dos rolamentos, dos pis-
t0es, dos cilindros, das valvulas, dos
filtres © das demais partes méveis
dos compressores.
Para darmos um exempio, medi-
mos 0 consumo de um bico de lim-
peza (mangueira de ar) com o dia-
metro de Ye". © consumo obtido foi
de 1,20 m*/ min. e a pressao utliza-
da de 7 bar calu para 2 bar. Note que
a pressdo caiu substancialmente.
MECATRONICA FACIL N° 3 - MARGOV2002
Esse valor de 1,20 m?/ min. 6 a
vazo_gerada por um compressor
de 12 HP — compressores de porte
pequeno — e 6 0 suficiente para
operar 10 pequenas ferramentas
pneumaticas que resultam em tra-
balho, 20 passo que um bico de lim-
peza 6 desperdicio de ar compri-
mido, exceto se fizer parte do pro-
cesso de produgao, mas mesmo
assim deve-se buscar alternativas
para reduzir esse consumo.
Podemos fazer uma compara-
40, guardando as devidas propor
gdes, em que a soma dos vaza-
mentos € semelhante a um vefcu-
lo parado em um congestionamen-
to gastando combustivel, além dos
outros componentes, € sem reali-
zar nenhum trabalho.
Para se reduzir 0 consumo de
ar podemos proceder de diversas
maneiras como, por exemplo, es-
tudar 2 possivel reducao dos di
metros utilizados em Fundi-
goes, Metalirgicas, e outros pro-
Gessos, bem como a pressdo do
ar comprimido.
Apenas para termos um idéia, a
tabela 8 6 bem ilustrativa, compa-
rando-se as pressdes utlizades para
diversos diémetros de orificios
Com os dados dessa tabela, 6
possivel fazer uria comparagao dos
custos da vazo de ar comprimido
entre dois orificios:
@ 5mm e a 6 bar - vazao é de
1,593 m*/min.
@ 4mmea 5 bar - vazao 6 de
0,873 m*min.
Redugao de 45 %: 0,720 mémin.
Custo da energia elétrica para
gerar o ar comprimido:
1,593 m/min. = (11,88 kWh x 16
horas x26 dias x RS 0,10) = $494.21
Bo orilicio ai
em me
3 0.408 msi.
4 0,723 ms
1.435 mn?)
0,874 m/min. = ( 6,51 kWh x 16
horas x 26 dias x RS 0,10 ) = RS
270,82
Nota: O valor de R§ 0,10 6 um va-
Jor baseado no consumo de ponta.
Resumindo
Custo anual para uma vazdo de
1,593 m*fmin — em um ortficio de @ 5
mm operando com uma presséo de 6
bar = R$ 5.930,52 (RS 494,21 x 12)
Custo anual para uma vazao de
0,873 mémin. — em um ofifcio de ©
4mm a uma pressdo de 5 bar = RS
3.249,84 (270,82 x 12).
Um ofificio de @ 4 mm (vazéo de
0,720 m®/min.): 12 x RS 223,39 = RS.
2.680,68.
10 orificios de @4 mm (vazao de
7,20 m*tmin.) = 12 x RS 2.233,90
RS 26.806,80,
‘A comperacéo acima retrata um
caso real em uma Fundigao.
ADMINISTRAGAO DO SISTEMA
DE AR COMPRIMIDO
Para uma correta administra-
40 do ar comprimido, temos que
levar em consideragao diversos
aspectos:
a) Geragao
mentos
b) Na medida em que diminui-
mos 0s vazamentos, aumentamos
a capacidade do sistema em prover
© ar comprimido necessario.
¢) Os vazamentos © 0 uso ina
dequado do ar comprimido compro-
metem a capacidade de todo o sis-
toma instalado.
) Devemos conhecer bem a ca-
pacidade de geragdo real do ar com-
primido, e 0 consumo real do ar nos
pontos de utiizagao (por equipamen-
Consumo + Vaza-
Pressao de operagao
nee bar
0,491 m/min. 0.574 msimin.
0873 main, 4,920 mimi.
364 m3/min. 4,593 mo/min.
Tabola 8 - Pressdes utiizadas para diversos diémetros de oriicios.
MECATRONICA FACIL N°.9 - MARGO/2002
PNEUMATICA
to), também levar em conta 0 “con-
sumo” por vazamentos e procurar
elimina-los ao maximo.
e) Toda vez que se incluir um
ponto de consumo de ar comprim
do, deve-se contabilizd-lo e
monitord-lo, evitando que todo 0 si
tema entre em colapso no decorrer
do tempo,
Exemplos de casos reais
(1) - Em uma certa empresa de
autopegas, deparamos com uma pro-
dutividade em 10 linhas de prensas,
com a pressdo de operagao de 5, 5
bar e uma produgao de 27 pecas por
minuto por prensa. Efetuadas algumas
corregées na linha, objetivando uma
reducao da perda de carga e elimi-
nando alguns vazamentos existentes,
‘a producéio passou para 32 pecas por
minuto com a pressao de operagao
de 6 bar, pressao esta recomendada
de projeto.
Resultado:
5 pecas x 60 minutos x 8 horas
de trabalho x 10 prensas x 0,85 de
rendimento x 22 dias por més
448,800 a mais por més.
Essa empresa estava deixando de
produzir 5.385.600 pegas por ano,
sendo a matéria prima o tinico custo
adicional nessa producdo.
2) ~ Em relaeao ao consumo de
energia,
Em uma grande empresa fol cons-
tatado um desperdicio mensal de
energia elétrica causado pelos vaza-
mentos — cujo valor era de RS
28.650,00 — sem contar os custos
‘operacionais com a manutengao de
diversos equipamentos, inclusive dos
compressors. Esse desperdicio re-
presentava anualmente 0 valor de RS
243.800,00. °
NO PROXIMO NUMERO
OQ leitor ira conhecer melhor
as partes que compdem um com-
pressor de ar comprimido @ co-
megaré a ver como se faz uma
instalagéo de uma central de ar
comprimido.
51
Na primeira parte desses
artigos comentamos que os
materiais plasticos s4o rela-
tivamente mais dificeis de
encontrar, porém, como os
préprios leitores percebe-
ram, as possibilidades e a
facilidade no manuseio, alia-
das a um acabamento de
boa qualidade os tornam ide-
ais para a execugdo de pro-
totipos de pequeno a médio
porte, Seguiremos, entao,
dando mais algumas ‘dicas”.
Para exeoutarmos cortes reconaa
dos externos poderemos utilizar'®)
estlete ou a serra tico-tico. Primeitdy
evidente a necessidade de um coms
'passo, devendo o mesmo estar mu-
niido de uma ‘ponta seca” para riscar
a chapa de pidstico na medida ne-
cesséiria; em seguida, podemos ir
“desbastando” a chapa com 0 estilete
eo alicate de corte tirando peda-
Gos até chegarmos préximo ao cite
Gullo, ou serrar a pega com a sei
(neste caso serre vagarosamente,
pois a rapidez nessa operacdo pro-
voca 0 aquecimento do material por
alrto, o que acaba fundindo-o e ade-
tindo-o a ferramenta). Veja as fotos:
82
A DARTE
PART C
José Francci Junior
MECATRONICA FACIL N® 3» MARGOi2d02
mos uma broca para abrir um furo
inne interna do cfrculo; em
sequida passa-se a serra des-
42 turo e, ap6s © cor
5 10s novamente a
f das, deve-
oo lixas para
de reba
wroas @ um me-
De tt 8 = Pastand a sera peo tre |
MECATRONICA FACIL N# 8 - MaRGO‘zo02 53
Devido a flexibllidade dos pias-
ticos podemos construir pegas cur-
vas com relativa facilidade, prin-
cipalmente quando trabalhamos
‘com 0 poliestireno. © tamanho da
peca e a espessura da chapa sao
determinantes para a forma que
pretendemos obter, de sorte que
em algumas ocasiées precisamos
moldar a chapa com 0 auxilio de
calor.
‘© caso mais extremo é a do-
bra, que pode ser executada com
© uso de um soprador elétrico ou
uma simples lamparina, ou até
mesmo um isqueiro, Primeiramen-
te, fazemos uma pré-dobragem
da chapa na beirada reta da
mesa de trabalho; em seguida,
foreando a pega com a mao pas-
'sa-se 0 isqueiro em movimentos
rapidos no ponto de dobra eo
plastico aquecido cedera até
onde for necessario.
54
Figura 13.
—
Poca dobraca,
Cuidado na utilizagao do is-
ueiro para nao aquecer demais
‘plastico! Faga alguns testes
ensaios primeiro, antes de
executar a peca definit
Bem pessoal, por ora & 56,
quaisquer duvidas, entrem em
contato conosco através do site.
Bom trabalho!
IECATRONICA FACIL N® 3 - MARCGOIZ002
an
aM
ELETRONICA BASICA PARA MECATRGNICA - 3° PARTE
TRANSISTORES
COMO CHAVES
© artigo anterior estuda-
mos os motores de cor-
rente continua e algumas
formas simples de
controlé-los invertendo seu senti-
do de rotagao, bem como ligando-
08 € desligando-os através de cha-
ves € relés. Esses motores, assim
como outros dispositivos elétricos
‘que produzem forea, sao fundamen-
tais em projetos mecatrénicos e,
por isso, devemos ter condigdes de
controla-los de todas as formas
possiveis. Os semicondutores de
potencia consistem em solucao im-
portante para esse controle com
possibilidades muito maiores do
que os relés e as chaves. Desse
modo, neste artigo vamos além,
analisando 0 emprego de semi-
condutores de poténcia como os
transistores bipolares ¢ FETS no
controle de motores e outras car-
gas de corrente continua que pos-
sam ser utilizadas nos projetos de
Mecatrénica.
OS TRANSISTORES COMO
CHAVES
Os transistores bipolares sao
componentes semicondutores que,
conforme ja estuclamos anteriormen-
te, podem ser encontrados em dois
tipos basicos: NPN e PNP.
Esses componentes apresentam
caracteristicas que nos permitem
usé-los de duas formas diferentes,
ambas de grande importancia para
as aplicases eletronicas e me-
catrénicas.
MECATRONICA FACIL N28 - MARGO/2002
Newton C. Braga
Para entendermos como eles po-
dem ser empregados, vamos partir do
Gireuito basico usando um transistor
NPN que é mostrado na figura 1.
Nesse circuito que controla uma
lampada, o transistor substitui um in-
terruptor simples que liga e desliga a
alimentacao.
Na sua base ligamos um segun-
do circuito que servira para contro-
lar o transistor e que tem um
potenciémetro de certo valor.
Parlimos entéo da condicao em
que o potenciémetro nao aplica ne-
nhuma tenséo na base do tran-
sistor.
Nessa condigéo, con-
forme ilustra a figura
2, no ha corrente
de base e 9 tran-
sistor ndo conduz
corrente alguma.
Dizemos que 0
transistor se en-
contra no corte.
Vamos ago-
ra atuar sobre
© potenciéme-
tro de modo
que gradual-
mente ele apli-
que tensao na
base do tran-
sistor, elevan-
do assim a cor-
rente que cir-
cula pelo cir-
cuito entre a
A medida em que a corrente re-
sultante da tensao aplicada na base
do transistor aumenta, o transistor
comeca a conduzir a corrente entre
(0 coletor © 0 emissor.De acordo com
© grafico da figura 4, a resistén-
cia entre o coletor e
© emissor do
base e 0
emissor observe
a figura 3.
Figura 1
rr
“Transistor NPN.
lh
Figura 2 - Transistor cortado
transistor comega a reduzir seu va~
lor de modo que a corrente que pas-
sa pelo transistor cresce.
Observamos entéo que durante
esse processo, a lampada ligada no
coletor do transistor aumenta de bri-
Iho gradativamente.
Continuando a abrir 0 pote-
nclémetro de modo que ele va pro-
vocando um aumento cada vez mal-
oF na corrente de base, verificamos
que chega um momento em que néo
temos mais nenhuma alteragao oor
respondente da corrente através do
transistor, ou seja, da correne no
coletor.
Neste ponto o transistor satura
ou Seja, apresenta sua menor resis-
ténoia entre coletor e emissor, € a
maxima corrente pode atravessé-lo.
Na figura § mostramos 0 que
‘acontece através de um grafico.
@y sm de
Be
Figura 8 - Transistor conduzindo,
56
Veja, entdo, que podemos usar
um transistor em duas regides bem
definidas dessa sua curva caracte-
ristica
a) Podemos usé-lo no trecho li-
ear, onde a corrente que circula pelo
coletor (através do transistor) é pro-
porcional & corrente de base, que 6
denominado modo linear.
) Ou usé-lo no trecho em que a
corrente 6 sempre maxima, indepen-
dentemente da corrente de base,
desde que ela seja maior que certo
valor, que 6 denominado modo
saturado.
Um transistor operando no modo
linear pode amplificar sinais. Peque-
nas variagdes da corrente de base
causam alteragdes muito maiores da
corrente de coletor. Essa modalida-
de de operacao 6 encontrada nos cir-
cuitos que trabalham com sinais de
sensores, audio @ também sinais de
radio.
Um transistor NPN comum como
‘© BC548 pode ter ganho de até 800
vyezes no modo linear. Isso significa
que uma corrente de base de 0,001
MA pode causar uma corrente de
base de 0,8 mA no seu coletor: valor
800 vezes maior.
Por outro lado, operando no modo
saturado, 0 transistor se comporta
‘como uma chave. Ele estara desli-
gado nao deixando passar corrente
alguma quando no corte, ¢ estara l-
gado deixando passar uma corrente
maxima quando saturado.
© que diferencia um transistor
NPN de um PNP na operacdo
indicada 6 apenas 0 sentido da cir
culagao da corrente.
Assim, para um transistor NPN
To -correnie de coletor
4
de bas:
Vb (v
Figura 4 - Curva |x V,
6o transistor.
MECATRONICA FACIL N¢ 3 - MARCO/2002
Figura 5 - Reyiao linear &
regido satutada
temos os sentidos das correntes de
polarizacdo que 0 fazem ligar e des-
ligar apresentados na figura 6(a)
Para os transistores PNP, os senti-
dos das correntes sao ilustrados na
figura 6(b).
CONTROLANDO CIRCUITOS
Observe que, na pratica, pode-
mos usar um transistor para subst-
tuir uma chave ou mesmo um relé
de contatos simples no controle de
dispositivos como motores, lampa-
das ou outras cargas.
Para isso, basta intercalar 0
transistor ao circuito, observan-
do 0 sentido de circulagao da cor-
rente conforme 0 tipo, e aplicar &
base desse transistor um sinal
que tenha polaridade capaz de
fazer circular a corrente que 0
sature,
Desse modo, temos duas possi-
bilidades que sao mostradas na fi-
gura 7.
Para os transistores NPN, como
9 visto na figura 7(a), ligamos o cit
cuito que vai ser controlado entre o
coletor e 0 positivo da alimentacao,
e colocamos a terra o emissor.
‘0 sinal de controle consiste numa
tensao positiva que deve ter pelo
menos 0,6 V (o minimo necessatio
para que © transistor comece a cor
duzir), a qual deve ser aplicada @
base.
Para os transistores PNP, liga-
mos 0 positive da alimentagao a0
emissor © a carga (circuito controla-
do) entre 0 coletor e a terra, confor-
me indica a figura 7(b).
MECATRONICA FAGIL Ne 3 - MARGO/2002
Tas Saat
Carga
NPN PNP a
Figuia 6 - Sentdes das
carrentes.
sinal de controle, neste caso,
consiste numa tensao negativa que
deve ter um valor de pelo menos 0,7
V para que o transistor comece a
conduzir.
Na pratica, 0 sinal de controle
pode ser derivado da mesma fonte
que alimenta 0 proprio circuito de
colotor, 0 que nos leva as configura-
Ges ilustradas na figura 8.
Na primeira, usamos 0 positi-
vo da alimentacdo para polarizar
0 transistor de modo a leva-lo &
saturagao. O resistor € exigido
para limitar a corrente na base do
transistor, que deve ficar em um
valor que seja suficiente para
satura-lo, mas nao excessiva a
ponto de queima-lo.
No segundo, fazemos 0 mesmo
com um resistor ligado a0 negati-
vo da fonte. Esse resistor também
deve ter um valor que deixe pas-
sar a corrente que sature 0 tran-
sistor, porém nao seja excessiva 2
ponto de queimar o transistor.
‘Como calcular esse resistor ou a
corrente que deve polatizar o tran-
ELETRONICA
sistor é um ponto fundamental no
projeto desse tipo de circuito.
Qual é a vantagem de tudo
isso? Por que 0 usar 0 transistor
como chave?
Como vimos, 0 transistor tem um
ganho, ou seja, uma corrente muito
menor de base pode controlar uma
corrente maior de coletor.
Isso quer dizer que podemos usar
este circuito para controlar uma car-
{ga de maior corrente a partir de dis-
positives que-nao podem manu-
Sear correntes intensas.
E 0 caso de um motor de alta
corrente (1 A por exemplo) que pre-
cise ser controlado por um sensor do
tipo reed-switch que agiiente apenas
100 ma,
Ullizamos 0 transistor como ele-
mento intermedirio e isso vai ser
emplicado ainda neste curso.
CALCULANDO 0 RESISTOR DE
BASE
Para os leitores que desejam
ter uma idéia de como o resistor
6 calculado, oferecemos um pro-
cedimento empirico, ou seja, um
procedimento simplificado. Com
ele, mesmo aqueles que nao te-
nham um dominio profundo da
Eletrénica e no saibam empre-
gar os procedimentos mais avan-
Gados de calculo, podem através
de algumas operacdes simples,
de projetar seu proprio circuito de
controle usando um transistor
como chave.
Vamos, entéo, partir das carac-
terisiicas do transistor.
Suponhamos que dispomos de
um transistor que possua um ganho
Figura 7 - Ligagso da carga a ser
coftrotada
Figura € - Configuragdes de controle
de carga.
57
ELETRONICA
(sensor) (0 ) Motor
Idéia do cre. de controle
‘lo um moter CC
Figura 9
minimo de 100 vezes. Dizemos que
esse transistor tem um ganho
hfe(min) de 100 vezes.
Isso significa que € preciso uma
corrente Ib de base 100 vezes me-
nor para produzir uma corrente de
coletor Io determinada.
‘Vamos também presumir que de-
sejamos controlar com esse transis-
tor uma lampada ou um pequeno mo-
tor de corrente continua que opere
‘com uma corrente de 100 mA, que
iremos ligar como ilustra 0 circuito
da figura 9.
Nosso problema é calcular 0 va-
lor do resistor que deve ser ligado
na base do transistor para que te-
nhamos um controle eficiente des-
se motor com uma corrente muito
menor, que pode ser fornecida por
um sensor, por exemplo um reed-
switch,
Se 0 ganho do transistor 6 100,
isso significa que precisamos de uma
corrente de pelo menos lc/hfe = 100/
400 =1 mA para saturé-lo.
E claro que néo devemos traba-
Ihar no limite. Assim, € convenionte
num caso como este pelo menos
dobrar a corrente de base, ou seja,
trabalhar com 2 mA.
Voltando agora ao circuit, vemos
que, na saturacao, ha uma queda de
tensio na base do transistor que sera
de aproximadamente 0,6 V, observe
a figura 10.
Isso implica em que, se alimen-
tarmos © circuit com 6 ¥, tirando os
0,6 V da queda de tensao na jungéio
base/emissor do transistor, sobram
5.4 V no resistor.
Ora, como conhecemos a coren-
te no resistor (que é de 2 mA) ea
58
7 Motor
Figura 10 - Tenséo V,,
na. saturagao,
tensdo sobre ele, basta aplicar a Lei
de Ohm para determinar o valor des-
se componente.
Basta entao dividir a tensao pela
corrente:
R=Vi=5,4/0,002 (0,002
A=2mA)
R=2 700 ohms
circuito completo que nos per-
mite controlar um motor ou lampada
de 100 mA com apenas 2 mA num
sensor empregando um transistor
‘como chave, ficard entéo como mos-
tra a figura 11.
Uma versio PNP do mesmo tran-
sistor 6 apresentada na figura 12,
Os procedimentos de calculo le-
vam aos mesmos valores de com-
ponentes.
Evidentemente, se tivermos um
transistor com ganho maior do que
100, a corrente de base pode ser me-
nor € 0 resistor de polarizagao maior,
Teremos nesse caso uma chave
com maior sensibilidade.
CARACTERISTICAS
DOS TRANSISTORES
Para que possamos usar um tran-
sistor como chave em uma aplica-
go como a indicada, precisamos
conhecer 0 ganho do transistor, con-
forme vimos no item anterior.
Mas, somente essa caracteris-
tica do transistor, nao 6 suticiente
para que tenhamos um elemento para
0 projeto desejado.
Duas outras caracteristicas dos
transistores sao importantes:
Cirouito
2ma ag
Figura 11 - Circuito completo p! controle do
motor CC.
a) Corrente maxima de coletor:
Ie (max).
Os transistores, ao conduzir a
corrente geram calor. Quanto mais
intensa a corrente que controlam,
mais calor produzem.
Por conseguinto, existe um lim
te para a corrente que um transistor
pode controlar como chave, e este
ite & dado por fatores camo o ta-
manho de sua pastitha de silicio e 0
tipo de invalucro usado,
Os transistores capazes de con-
trolar correntes intensas sdo dotados
de recursos para a montagem em
radiadores de calor, conforme ilustra
a figura 13,
Assim, para fazer um projeto
colocando um transistor como cha-
ve, precisamos em primeiro lugar
saber qual 6 a corrente que ele
pode controlar, e depois se est de
acordo com a fossa aplicacao,
dando normalmente uma margem
de seguranca
Isso quer dizer que, se vamos
controlar um motor ou lmpada de
100 mA, precisamos de um transis-
Figura 12 - Versdo do ereuto cam transistor
PNP.
MECATRONICA FACIL N° 3 - MARGO/2002
tor que tenha uma corrente de coletor
maxima (representada por lo(max))
de pelo menos 200 mA.
Na pratica, os transistores sao
divididos em categorias de acordo
com a corrente de coletor, ou seja,
com a poténcia maxima que podem
controlar,
Na mesma figura 13, temos
entdo os transistores de balxa po-
téncia que podem controlar corren-
tes de até uns 100 mA no maximo,
transistores de média poténcia até
1 Ae transistores de alta poténcia
capazes de controlar correntes aci-
ma de 1 A. 0 2N3055, por exem-
plo, tem uma corrente de coletor de
Baia
poitnca
media
Invélucros
plastics |
15 A, mas na prética nao se reco-
menda que ele controle cargas mai-
ores que 5 A.
b) Tensdo maxima
coletor e emissor
Outra caracteristica importante
que precisamos observar num tran-
sistor quando vamos usé-lo, é a ten-
sao maxima que pode aparecer en-
tre seu coletor e 0 emissor indicada
por Voe(0) - 0 “o" designa a condigaio,
de base aberta.
Se uma tenséo maior do que a
especificada for aplicada no transis-
tor, ele se “queimara”.
Os transistores normalmente
disponiveis para aplicagdes co-
muns tém tensdes entre coletor ¢
entre
MECATRONICA FACIL N® 3 - MARCO/2002
emissor na faixa de 20 volts até mais
de 600 votts.
E claro que, quando fazemos um
projeto usando um transistor como
chave devemos dar uma tolerancia.
Assim, mesmo que uma aplicagao
‘opere com apenas uns 12 V, deverios
preferivelmente empregar transistores
com 30 ou mais volts de tenséo.
CONTROLANDO CARGAS
INDUTIVAS
Em muitas aplicagSes os tran-
sistores so colocades para contro-
lar dispositivos que nao seguem a
Lei de Ohm, isto é, ndo sao re-
pen ol >
| *
lavéluero metélico
Figura 19 - Aspactos fisloos dos transistoree © raciadores de calor.
sistores, como lampadas, elementos
de aquecimento, etc.
Motores, relés, solendides @ ou-
{ros tipos de dispositives denomina-
dos “indutivos” podem trazer alguns
problemas para os transistores que
0s controlam, se forem usados sem
determinados tipos de precaugées.
(© que acontece que esses dis-
positivos tendem a “reagir’ as mudan-
gas bruscas da corrente que circula
através deles.
Conforme indica a figura 14, isso
acontece justamente quando eles
a0 desligados.
Desse modo, ao ligarmos um
relé usando um transistor, a corren-
te através de seu enrolamento cria
um campo magnético cujas linhas
ELETRONICA
Pico
tensao
V (tense
aplcada) }
|
liga A Dosiaa
Figura 14 - Picos indosejaveis com cargas
‘ndtv.
de forga se expandem pelo espago.
Quando desligamos 0 dispositive, as
linhas se contraem rapidamente ge~
rando uma alta tens&o, porém de po-
laridade inversa a que estabeleceu
aquela corrente.
Essa tensao pode alcangar cen-
tenas de volts, o que é suficiente para
danificar o transistor que controla 0
dispositive, Uma maneira de se evi-
tar esse problema 6 protegendo o
transistor com um diodo, que é liga-
do da forma indicada na figura 15.
Esse diodo “absorve" 0s pulsos
gerados na comutagao da carga evi-
tando que eles aparegam sobre 0
transistor.
TRANSISTORES DARLINGTON
Um modo de obtermos mais sen-
sibilidade dos transistores no contro-
le de cargas da forma indicada, é
montando mais de urn elemento numa
forma de ligagéo denominada
“Darlington”.
‘© que fazemos é ligar 0 emissor
de um transistor 4 base do seguinte,
observe a figura 16
—
iodo A | Carga |
‘Conenss imine
{rensisior
Figure 15 - Protegtio do transistor
com diode.
50
ELETRONICA
Figura_16 - Wontagem
Darington
Com esta maneira de ligagao 0
ganho fica multiplicado. Assim, se
ligarmos um transistor de ganho 100
a outro de ganho 100, teremos um
‘ganho final de 10 000 vezes! (100 x
100).
Na pratica, podemos ligar transis-
tores separados dessa forma como
também utilizar transistores que ja
contenham num tinico invélucro (em
sua pastilha) dois transistores liga-
dos da forma indicada. Estes sao
chamados transistores Darlington
@ tém seu aspecto e simbolos repre-
sentados na figura 17.
© transistor TIP110 (NPN) da
‘Texas Instruments, um exemplo da
Darrington que pode controlar corren-
tes de até 1,25 A tendo um ganho
tipico de 1000 vezes.
transistor TIP120 (NPN) da
Texas, pode por outro lado contro-
lar até 3 A com um ganho de 1000
vezes.
Basia um Unico transistor desse
tipo para se controlar um motor de 1
A a partir de uma corrente de ape-
nas 1 mA!
Na figura 18 damos dois circui-
tos de aplicacdo para o controle de
motores, solendides outros dispo-
sitivos empregando transistores
Darlington.
OUTROS TIPOS DE
TRANSISTORES
Um outro tipo de transistor muito
importante que pode ser usado como
chave, é 0 POWER-FET ou Transis-
tor de Efeito de Campo de Poténcia,
que tem 0 simbolo aspecto mos-
trados na figura 19.
60
Esse transistor 6 usado de modo
semelhante ao transistor bipolar co-
mum com a diferenga de que, em
lugar de termos uma corrente de en-
trada controlando uma corrente de
carga, dispomos de uma tensfio de
entrada (gate) controlando uma cor-
rente de carga (corrente entre dreno
e fonte),
O Power-FET é entao ligado da
forma indicada na figura 20.
Quando aplicamos uma tenséo
entre 1 e 2 V na comporta (gate)
do Power-FET, ele conduz e a
resistencia entre 0 dreno (d) e a
fonte (s) cai para um valor muito
baixo, da ordem de fracao de
ohm:
Observe que praticamente ne-
nhuma corrente circula pela com-
porta do Power- FET, pois ele re-
presenta uma —_resisténcia
elevadissima, da ordem de muitos
milhdes de ohms. Dizemos que se
trata de um dispositive de altissima
impedancia de entrada
Na figura 21 desenhamos como
fazer a ligagdo de um Power-FET
de canal N no controle de um mo-
tor e de que modo o sinal de con-
trole pode ser aplicado & sua com-
porta.
Plasticos
.
A @) =&
&. ~ N > ©
S NPN PNP
C
r]
a \s
Gate (a)
Figura 19 - Simbolo @ aspectos do
Power FETs
Quando fechamos a chave S,,
uma tensao positiva 6 aplicada &
comporta e o transistor conduz.
Os Power-FETs séo capazes de
controlar correntes muito intensas,
alguns chegando tacilmente a deze-
nas de amperes, sendo por isso dis-
positives muito importantes para
aplicagdes em Robotica.
‘No entanto, sua principal desvan-
tagem estd no fato de que esses dis-
positivos sao excelentes con-
troladores apenas quando alimenta-
dos com tensées relativamente al-
Metélicos
Figura 17 ~ Aspectos @ simbolos dos transistores Dartington
—o+6azav
tT
sia Bn
(NP)
20
Entrada
0+6a24V
moor“)
te ae
(PNP)
Figura 18 - Cireuitos de Controle com transistores Dartington,
MECATRONICA FACIL N° 3 - MARCO/2002
Entrada
(conivole}o
Figura 20 - ligagao 0
PowerreT
tas (acima de 12 V). Com baixas ten-
ses, a resisténcia entre o dreno ea
fonte nao cai muito no disparo e eles
dessa forma, apresentam perdas
considerdveis de energia.
Uma observagao importante 6
que 0 Power-FET também tem uma
regio linear de operacao e, por isso,
também pode ser usado como am-
plificador.
APLICAGOES PRATICAS
Diversos projetos praticos inte-
ressantes de Mecatrdnica podem ser
elaborados utilizando-se transistores
como chaves.
Podemos usar transistores para
controlar diretamente motores,
solendides, € outros dispositivos ou
também relés quando a corrente dis-
ponivel nao for suficiente para acio-
nar diretamente dispositivos deste
tipo.
Assim, vamos fornecer algumas
aplicacdes interessantes comegan-
do justamente com os relés.
+9a48V
+—
J Carga
(motor)
piso02 |
00 i
L AF 640
wa |
Figura 21 - Contle de Motor com
Power FET.
MECATRONICA FACIL N° 8 - MARCO/2002
interuptor
de laminas
22
(até 50 may
Figura 22 - Controle de Feld o/
Power FET
a) Controlando um Relé
Conitrolar um relé com um inter-
ruptor simples de baixa corrente ou
um sensor do tipo de laminas, como
‘oapresentado na figura 22 pode le-
var a aplicagoes interessantes em
Mecatrénica
No que se refere ao sensor de
baixa corrente podemos tomar como
exemplo um reed-switch, © no caso
do sensor de laminas um detector de
ppresenga por toque para robé.
E possivel acionar um relé com
contatos reversiveis para inverter 0
sentido de rotacao de um motor quan-
do 0 interruptor for fechado. Neste
‘caso, temos um circuito de agaio mo-
mentanea, ou seja, 0 relé s6 perma-
necera com os contatos fechados
enquanto 0 circulto estiver conduzin-
do, isto 6, enquanto o sensor estiver
fochado,
Na figura 23 temos um exem-
plo de aplicacéo onde podemos
usar um relé de 6 V x 50 mA com
contatos reversiveis para inverter
um motor.
i ELETRONICA
O sensor 6 um reed-switch ou ain-
da um interruptor de laminas, que
deve ser colocado no local em que
se deseja que 0 motor pare.
© mesmo circuito poderé funcio-
nar com motores de 12 V bastando
para isso que se troque o relé por
um de 12 V com corrente de
acionamento de até 50 mA.
Lista de Material:
Q, - BO548 - transistor NPN de
uso geral
D, - 1N4148 - diodo de uso geral
K; - relé sensivel de 6 V x 50 mA
‘ou menos - contatos de acordo com.
a carga acionada
R, - 2,2 kso x 1/8 W - resistor (ver-
metho, vermelho, vermelho)
S, - Interruptor de laminas (ver
texto)
B, - Bateria de 6 V (4 pilhas)
Diversos: ponte de terminais ou
placa de circuito impresso.
b) Controtando um motor com
sensor resistivo
Um tipo de sensor muito interes-
sante para projetos de Mecatrénica
& 0 sensor de luz chamado LDR ou
foto-resistor (LOR = Light Dependent
Resistor).
Um LDR consiste num resistor
cuja resistencia depende da quanti-
dade de luz que incide numa super-
ficie sensivel, conforme ilustra a
gura 24.
No escuro, a resisténcia do LOR
chega a dezenas ou centenas de mi-
Ihares de ohms, enquanto que no cla-
ro (sob iluminagao intensa) ela cai
Figura 23 - Exemplo de aplcagio pf inversao de um motor
et
ELETRONICA
Suporicie
Figura 24 - Aspecto @ simbolo do
LDR.
para algumas centenas ou milhares
de ohms.
Um LOR nao pode controlar sozi-
rnho uma corrente intensa, acionan-
do um motor no claro @ deixando-o
inoperante no escuto, conforme mos-
tra.a figura 26, pois ele nao conse-
ue operar cortentes intensas,
Entretanto, podemos associar 0
LDR a um transistor © usé-lo para
acionar os dispositivos que desejar-
mos com a luz.
Uma primeira possibilidade con-
siste em se omprogar um transistor
para ampificar a corrente através do
LDR e assim acionarmos um relé. 0
relé poderd entao ser usado para
‘controlar um circuito de maior potén-
cla.
Temos, portanto, duas possibili-
dades intoressantes que podem ser
usadas na pratica em projetos de
Mecatrénica, a saber.
4. Relé acionado pela luz
No circuito da figura 26 ligamos
© LDR de tal forma que a corrente na
base do transistor aumenta quando
a tor
instionts™
Figura 25 - Detciéncia de
‘corranie do LDA.
62
incide luz no LDR, ou soja, a resis-
téncia do LDR diminui ao ser ilumi-
nado, deixando assim passar mais
corrente.
Ajustando a corrente no escuro e
no claro com a ajuda do trimpot de
ajuste podemos colocar o circuito no
limiar do disparo, isto &, perto do
onto em que o transistor comeca a
‘conduzir.
Assim, basta bater um foco de
luz no LDR para que a resisténcia
diminua, a corrente na base no tran-
sistor aumente e ele sature acionan-
do 0 rele,
Em um rob ou dispositive
‘mecatrénico podemos usar isso em
automatismos diversos: inverter a
rotagao de um motor quando ele se
aproxima de uma fonte de luz é um
exemplo. E possivel elaborar um
robé que “tenha medo da luz", mas
que a procure sem se aproximar
muito.
Lista de Material:
Q, = BC548 ou equivalente - tran-
sistor NPN de uso geral
aa
!
Bes [ow
a Jacvsom hs
Figura 27 - Relé acionado pela sombra,
t 1
svsoma —_
a =
oo Te
Benda.
Figura 26 - Rele acionado pala uz,
D, - 1N4148 ou equivalente -
diode de silicio de uso geral
K, - Relé de 6 V x 50 mA e conta:
tos de acordo com a carga acionada
P, = 100 2 - trimpot
LDR - Qualquer LDR redondo co-
mum (*)
B,-6V- 4 pilhas ou bateria
Diversos: placa de circuito im-
presso ou ponte de terminals, fios,
solda, suporte de pilhas, etc.
(() LDRs comuns podem ser con-
seguidos em diversos aparelhos fora
de uso como, por exemplo, televiso-
res antigos que utilizam este com-
Ponente como controle automatico
de brilho.
2. Relé acionado pela sombra
A segunda possibilidade de uso
do transistor como chave num cir
cuito com LDA é mostrada na figura
27.
Trata-se de urf circuito que acio-
nao relé quando a luz deixa de incidir
sobre 0 LDR, ou seja, quando temos
‘sombra sobre 0 sensor.
Ite
Fe
a
Boss
MECATRONICA FACIL N?3 - MARGO/2002
ee ELETRONICA
Figura 28 - Controle de motor CC ol
Darington ¢ LDA.
A sensibilidade do circuito € ajus-
tada também no trimpot e seu prin-
cipio de funcionamento € o seguin-
te: estando iluminado, o LDR desvia
da base do transistor a corrente que
deveria saturd-lo e que é ajustada no
trimpot. Isso ocorre porque ilumina~
do, ele apresenta uma baixa resis
téncia.
Quando fazemos sombra so:
bre 0 LDR a sua resisténcia au-
menta impedindo a passagem da
corrente que, entao, pode fluir
pela base do transistor provocan-
do sua saturagao,
) Controtando um motor sem
relé
‘A aplicagao em que podemos
controlar um motor usando um sensor
resistivo ou mesmo uma chave de
balxa corrente também leva a mui-
tas possibilidades interessantes de
projetos de Mecatrénica.
O meihor exemplo pode ser
dado no artigo “Veiculo Acionado
pela Luz” de nossa edigéo anterior
‘onde utilizamos um Darlington de
Poténcia e um LDR para controlar um
motor de corrente continua, confor
me circuilo ilustrado na figura 28.
Sugerimos aos leitores que te-
nham aquela revista que analisem 0
funcionamento do circulto apresen-
tado naquela edigao e até fagam a
montagem do carrinho para aprender
mais sobre os transistors usados
como chaves.
‘Também lembramos que o mes-
mo prinefpio de acionamento do car-
rinho pode ser utilizado em um bar-
co acionado pela luz, evoluindo as-
sim o controle do primeiro artigo des-
ta série.
Pois bem, no circuito em ques-
to 0 funcionamento é 0 seguinte:
‘Como precisamos de uma corren-
te algo intensa para acionar o peque-
‘no motor, um transistor de baixa po-
téncia néo teria nem ganho nem ca-
pacidade de corrente de acordo com
‘0 que precisamos. Assim, optamos
pelo uso de um Darlington TIP110 ou
TIP120 ou qualquer um da série
(TIP111, TIP112, TIP121 ou TIP122),
Ligamos base do transistor 0
LDR e um resistor de valor bastante
alto, apenas para evitar 0 acio-
namento erratico do circuito € obter
maior sensibilidade.
© LDR foi instalado dentro de
um tubinho opaco de modo a rece-
ber luz apenas de uma determina-
da diregdo, justamente a da lanter-
na de acionamento, conforme mos-
tra a figura 29.
Assim sendo, ao ser iluminado
0 LDR tem sua resisténcia diminu-
Figura 29
Instalagio do LOR dentro de
“ubinho opaco
Caixa do reducao
fda e corrente pode fluir pela base
do transistor fazendo com que ele
sature. Nessas condigdes, 0 mo-
tor ¢ alimentado entrando em acao.
O mesmo principio pode ser em-
pregado em diversos projetos de
Mecairénica e Robstica
Uma sugestao é agregar dois
circuitos de controle como esse a
duas caixas de redugéo que acio-
nem as rodas de um rob6, observe
a figura 30.
Colocando os LDRs em posigdes
cruzadas na frente do robé, ele pro-
curara fontes de luz, pois, ao se des-
vir da fonte, um dos LORs deixa de
ser iluminado antes do outro. Com
isso, 0 motor que permanece em
acionamento corrige a sua rota
Obs.: neste circuito nao liga-
mos 0 diodo de protecdo em pa-
ralelo com 0 motor, porque 0 tran-
sistor suporta tensdes bastante
elevadas dispensando esse re-
curso, No entanto, se tipos de
menor tensao forem usados, 0
diodo 6 importante
Lista de Material
Q, -TIP120 ou equivalente - tran-
sistor NPN Darlington
LDR - Qualquer LOR comum
M, - Motor de 6 V (ou outra ten-
‘so, conforme 0 projeto)
R,-3,9.a4,7M #- resistor (la-
ranja, laranja, verde ou amarelo, vio-
leta, verde)
B, - Bateria de 6 4 pilhas
Diversos: ponte de terminais, su-
porte de pilhas, fios, solda, etc. ©
LoR2
LOR +
Tina clara no chao
Figura 20 - Aplicago com dois cicutos de contro @ caixas de redugao.
MECATRONICA FACIL N? 3 - MARCO/2002 63.
Você também pode gostar
- TKR Cara Preta ManualDocumento9 páginasTKR Cara Preta ManualLucio Oliveira100% (1)
- Training System Aiwa (Portugues)Documento70 páginasTraining System Aiwa (Portugues)Lucio OliveiraAinda não há avaliações
- Sonorizacao Curso PDFDocumento93 páginasSonorizacao Curso PDFDon Aj100% (3)
- Amplificador Classe D 3200 Watts 127vDocumento4 páginasAmplificador Classe D 3200 Watts 127vLucio Oliveira29% (7)
- Macetes de Resoluções Notebook - Alguns ModelosDocumento3 páginasMacetes de Resoluções Notebook - Alguns ModelosLucio OliveiraAinda não há avaliações
- SR1000 Magma Maquina de Fumaça RemotoDocumento1 páginaSR1000 Magma Maquina de Fumaça RemotoLucio OliveiraAinda não há avaliações
- PHILCO b102 - b150 - b103 - Chassi - tv-350 - EeDocumento2 páginasPHILCO b102 - b150 - b103 - Chassi - tv-350 - EeLucio OliveiraAinda não há avaliações
- Esquema Elétrico T800 TarampsDocumento4 páginasEsquema Elétrico T800 TarampsLucio Oliveira67% (3)
- TV PHILCO b110 - b120 - Chassi - tv-360 - tv361 - EeDocumento2 páginasTV PHILCO b110 - b120 - Chassi - tv-360 - tv361 - EeLucio OliveiraAinda não há avaliações
- MP 420 StanerDocumento1 páginaMP 420 StanerLucio Oliveira50% (2)
- Ac Works GRD 50 Esquema AproximadoDocumento2 páginasAc Works GRD 50 Esquema AproximadoLucio OliveiraAinda não há avaliações
- antera-TS500A FONTEDocumento1 páginaantera-TS500A FONTELucio Oliveira100% (1)
- Magma Smoke Baby 600 WattsDocumento1 páginaMagma Smoke Baby 600 WattsLucio OliveiraAinda não há avaliações
- Magma Strobo Ssm7 750wDocumento2 páginasMagma Strobo Ssm7 750wLucio Oliveira50% (4)
- LF1000A-F AnteraDocumento1 páginaLF1000A-F AnteraLucio Oliveira100% (1)
- Amplificador Lanner Al - 8290Documento1 páginaAmplificador Lanner Al - 8290Lucio OliveiraAinda não há avaliações
- Magma Strobo Sn6 600w Ligacoes Dos FiosDocumento1 páginaMagma Strobo Sn6 600w Ligacoes Dos FiosLucio OliveiraAinda não há avaliações
- Antera cp12 1aDocumento1 páginaAntera cp12 1aLucio OliveiraAinda não há avaliações
- CTA Eletronica N 16Documento63 páginasCTA Eletronica N 16Lucio Oliveira100% (3)
- Antera CP12 - 1A Placa de ComponentesDocumento2 páginasAntera CP12 - 1A Placa de ComponentesLucio Oliveira50% (2)
- Mecatrônica Fácil Edição 13Documento62 páginasMecatrônica Fácil Edição 13Lucio OliveiraAinda não há avaliações
- Aprenda Montar Seu Próprios Amplificador, Pedal de Efeitos de Guitarra, Baixo e Etc (Boss, MXR, EH, Marshall) Mais de 800 Esquemas!Documento2 páginasAprenda Montar Seu Próprios Amplificador, Pedal de Efeitos de Guitarra, Baixo e Etc (Boss, MXR, EH, Marshall) Mais de 800 Esquemas!Lucio Oliveira0% (2)
- Taramps® T1.2 KW PDFDocumento4 páginasTaramps® T1.2 KW PDFLucio OliveiraAinda não há avaliações