Você também pode gostar
- O Guardador de Rebanhos IiDocumento2 páginasO Guardador de Rebanhos IiAna PaivaAinda não há avaliações
- Bingo CientirinhasDocumento10 páginasBingo CientirinhasCARLOS FALCASSA100% (2)
- Iracema - Adaptação Teatral (José de Alencar)Documento5 páginasIracema - Adaptação Teatral (José de Alencar)Zeca RolandAinda não há avaliações
- Vida Saudável PDFDocumento4 páginasVida Saudável PDFKAUÃ GOMES DIASAinda não há avaliações
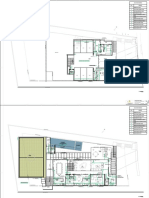
- JW1 - Projeto Executivos - Pontos Elétricos e Hidráulicos WilkeDocumento6 páginasJW1 - Projeto Executivos - Pontos Elétricos e Hidráulicos WilkeJean silvaAinda não há avaliações
- A Importância Do Sódio No Manejo Nutricional de Cães e Gatos CardiopatasDocumento7 páginasA Importância Do Sódio No Manejo Nutricional de Cães e Gatos CardiopatasGláucia LunaAinda não há avaliações
- Pratique Unidade 2Documento2 páginasPratique Unidade 2Pr-WallaceTonyAinda não há avaliações
- Aprendendo Sobre FoneticaDocumento2 páginasAprendendo Sobre FoneticaValciney PiresAinda não há avaliações
- 6P PDFDocumento9 páginas6P PDFChristian RafaelAinda não há avaliações
- Demonologia CONJURADADocumento17 páginasDemonologia CONJURADADENYRO01Ainda não há avaliações
- A Industrialização Brasileira Após Anos 90 Até A ContemporaneidadeDocumento2 páginasA Industrialização Brasileira Após Anos 90 Até A ContemporaneidadeJúllia Fagundes AmaralAinda não há avaliações
- Epilepsia Na Infancia e AdolescenciaDocumento502 páginasEpilepsia Na Infancia e AdolescenciaLeoberto Batista Pereira Sobrinho100% (1)
- Transmissor Com Ba1404 e 2sc2458Documento8 páginasTransmissor Com Ba1404 e 2sc2458carrlosalbertodossantossilvaAinda não há avaliações
- Afasia de ConduçãoDocumento55 páginasAfasia de ConduçãopatriciasusckingAinda não há avaliações
- FISPQ AMB-C-16 #Atul003Documento3 páginasFISPQ AMB-C-16 #Atul003CONFIARE PINTURAS E JATEAMENTOAinda não há avaliações
- 3-RenascimentoCultural e CientificoDocumento21 páginas3-RenascimentoCultural e CientificoPaulo AndradeAinda não há avaliações
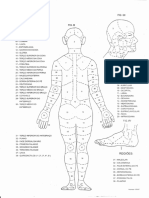
- Topografia Corpo HumanoDocumento2 páginasTopografia Corpo Humanoestevaocanan100% (9)
- Certificado de Qualidade - Oyamota - Nf.1852 - 02.09.2016Documento5 páginasCertificado de Qualidade - Oyamota - Nf.1852 - 02.09.2016MauroDosSantosCostaAinda não há avaliações
- Folheto Crisma 1Documento2 páginasFolheto Crisma 1Murilo Vilas BoasAinda não há avaliações
- Alfred Lothar WegenerDocumento4 páginasAlfred Lothar WegenerBresser OliveiraAinda não há avaliações
- TJ Ba Aula 1Documento27 páginasTJ Ba Aula 1Lopes PublicidadeAinda não há avaliações
- Fichamento: MARTELOTTA. M, E. (Org.) - Manual de Linguística. São Paulo: Contexto, 2009, p.177 - 192Documento2 páginasFichamento: MARTELOTTA. M, E. (Org.) - Manual de Linguística. São Paulo: Contexto, 2009, p.177 - 192Jason FelipeAinda não há avaliações
- Apostila de Neemias - Pr. Paulo.Documento24 páginasApostila de Neemias - Pr. Paulo.Hilda CastroAinda não há avaliações
- A Psicoterapia Breve - Abordagem TCCDocumento19 páginasA Psicoterapia Breve - Abordagem TCCAdriana AraldiAinda não há avaliações
- ESTRUTURADocumento9 páginasESTRUTURACarlos Felipe Bezerra De LimaAinda não há avaliações
- FolderDocumento2 páginasFoldertirsi mabelAinda não há avaliações
- MecFund Aula 08 - Oscilador Harmonico Amortecido PDFDocumento57 páginasMecFund Aula 08 - Oscilador Harmonico Amortecido PDFLeonardoMaiaAinda não há avaliações
- PCC BiocelDocumento3 páginasPCC Biocelallisonassun10Ainda não há avaliações
- As Microcervejarias No Brasil Atual - Eduardo MarcussoDocumento171 páginasAs Microcervejarias No Brasil Atual - Eduardo MarcussoodairnettoAinda não há avaliações
- Referencial de Competências-Chave NS STCDocumento21 páginasReferencial de Competências-Chave NS STCnuno.jose.duarte100% (1)