Você também pode gostar
- Letra+Cursiva TreinoDocumento45 páginasLetra+Cursiva TreinoDaniele Almada100% (1)
- Nova GIA:SP - TAFXGSP - TAF - P12 - TAF - TDNDocumento6 páginasNova GIA:SP - TAFXGSP - TAF - P12 - TAF - TDNHugo PieroniAinda não há avaliações
- Ficha de Exercicio Aula 7Documento6 páginasFicha de Exercicio Aula 7Alcilene FreitasAinda não há avaliações
- Emissao Recibo Criar Conexao ODBCDocumento5 páginasEmissao Recibo Criar Conexao ODBCchristiano gaioAinda não há avaliações
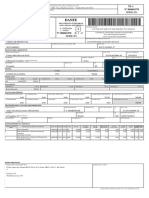
- Danfe: SÉRIE 001Documento1 páginaDanfe: SÉRIE 001capril conqusitaAinda não há avaliações
- Radical CandorDocumento5 páginasRadical CandorJeremias SobrinhoAinda não há avaliações
- Ficha de PersonagemDocumento4 páginasFicha de PersonagemLucas ViniciusAinda não há avaliações
- Datasheet MDMDocumento2 páginasDatasheet MDMGiovani AlmeidaAinda não há avaliações
- Checklist Lancamento DesafioDocumento10 páginasChecklist Lancamento DesafioLucas de Petta33% (3)
- Manual Aparelhos Alcatel 4038 4039Documento2 páginasManual Aparelhos Alcatel 4038 4039Guilherme de OliveiraAinda não há avaliações
- Slide - Unidade IIDocumento14 páginasSlide - Unidade IILuiz CarlosAinda não há avaliações
- Mindset ÁgilDocumento8 páginasMindset ÁgilFernanda Máximo AlvesAinda não há avaliações
- Toshiba Satellite L650-11F - DynabookDocumento3 páginasToshiba Satellite L650-11F - Dynabookgoldenspitfire100% (1)
- 1.1 Conceito de TADocumento2 páginas1.1 Conceito de TAAna SantiagoAinda não há avaliações
- VG70 User Manual V01.04-FinalDocumento167 páginasVG70 User Manual V01.04-FinalCláudio Fernando Oliveira80% (10)
- ServicoDocumento1 páginaServicoRoberio CostaAinda não há avaliações
- Prova Estruturas MetalicasDocumento2 páginasProva Estruturas MetalicasLucas BarcellosAinda não há avaliações
- Ciclo Diag - Volume 14 PDFDocumento260 páginasCiclo Diag - Volume 14 PDFgabrielzinho43100% (2)
- DEVISIS - Banco de DadosDocumento4 páginasDEVISIS - Banco de DadosAlexandre ContreiraAinda não há avaliações
- Tabelas - Visualg 3.0Documento1 páginaTabelas - Visualg 3.0Álvaro Cavalcante TomazAinda não há avaliações
- CV Brunofonseca 2020Documento4 páginasCV Brunofonseca 2020api-287025508Ainda não há avaliações
- Atuadores ElétricosDocumento27 páginasAtuadores ElétricosFERNANDA ANDRADEAinda não há avaliações
- CLC 2 - Atividade 1Documento5 páginasCLC 2 - Atividade 1Catarina100% (1)
- O Que São Os Objetivos Específicos Do Trabalho de Fim de CursoDocumento3 páginasO Que São Os Objetivos Específicos Do Trabalho de Fim de CursoRoland MboanaAinda não há avaliações
- Cms Files 317328 1679668972EBOOK CONTAS LARANJADocumento15 páginasCms Files 317328 1679668972EBOOK CONTAS LARANJAValentim SousaAinda não há avaliações
- Certificado Reservatorios Fortlev-Maio 2023Documento2 páginasCertificado Reservatorios Fortlev-Maio 2023antonio weidasAinda não há avaliações
- Modelo de Orçamento para Produto AudiovisualDocumento7 páginasModelo de Orçamento para Produto AudiovisualFelipe SilvaAinda não há avaliações
- Portfólio Mithisu Engenharia Do BrasilDocumento4 páginasPortfólio Mithisu Engenharia Do BrasilJosicleo SousaAinda não há avaliações
- Anexo 2 - Cultura DigitalDocumento4 páginasAnexo 2 - Cultura DigitalVanucci EvaristoAinda não há avaliações
- Wfimagem NotaDocumento1 páginaWfimagem NotaJosé Wyslan LimaAinda não há avaliações