Você também pode gostar
- New Fiesta 2011 ManualDocumento322 páginasNew Fiesta 2011 Manualrmsabreu86% (7)
- Multímetro de Bancada Digital Mdm-8045aDocumento20 páginasMultímetro de Bancada Digital Mdm-8045aMarioAinda não há avaliações
- Programação e Configuração de PLCDocumento194 páginasProgramação e Configuração de PLCGleisimar Bassini0% (1)
- Livro Eletron Potencia I AragaoDocumento108 páginasLivro Eletron Potencia I AragaoGleisimar BassiniAinda não há avaliações
- Elementos de Analise de Sistemas de Potencia - William StevensonDocumento236 páginasElementos de Analise de Sistemas de Potencia - William StevensonPaulo Coimbra100% (10)
- Medidores Eletrônicos de Energia Elétrica - Fiscalização Da ANEEL Na AMPLA - Tarifas Da ENERSULDocumento26 páginasMedidores Eletrônicos de Energia Elétrica - Fiscalização Da ANEEL Na AMPLA - Tarifas Da ENERSULGleisimar BassiniAinda não há avaliações
- Livro Eletron Potencia I AragaoDocumento108 páginasLivro Eletron Potencia I AragaoGleisimar Bassini100% (1)
- Geração Coca-ColaDocumento6 páginasGeração Coca-Colabruno kAinda não há avaliações
- Teoria Geral Da MúsicaDocumento5 páginasTeoria Geral Da MúsicaJoao Roberto PereiraAinda não há avaliações
- Avaliacao Paf1Documento6 páginasAvaliacao Paf1Pedro Henrique SilvaAinda não há avaliações
- Planilha de Notas (4 Bimestre) Professora Flávia de ArteDocumento10 páginasPlanilha de Notas (4 Bimestre) Professora Flávia de ArteflaviaesparteAinda não há avaliações
- ExuDocumento2 páginasExuKaua MagnoAinda não há avaliações
- pf1n2 2022Documento4 páginaspf1n2 2022Jose Da Silva Costa NetoAinda não há avaliações
- Ensino Médio Regular Ano 1º/2º Ano A Noturno 07: Relação de Alunos Por SituaçãoDocumento2 páginasEnsino Médio Regular Ano 1º/2º Ano A Noturno 07: Relação de Alunos Por SituaçãoJessicaPereiraAinda não há avaliações
- 7ano - 06 - Vozes HumanasDocumento6 páginas7ano - 06 - Vozes Humanasbferreira597Ainda não há avaliações
- 1 Songbook 8Documento12 páginas1 Songbook 8rhuanst100% (1)
- Calendário Acadêmico - Mar-2023Documento12 páginasCalendário Acadêmico - Mar-2023Jo LopesAinda não há avaliações
- 00001046Documento2 páginas00001046Everton DiasAinda não há avaliações
- Manual IC R5Documento86 páginasManual IC R5Marcos RobertoAinda não há avaliações
- Digitações Da Flauta Doce Contralto BarrocaDocumento2 páginasDigitações Da Flauta Doce Contralto BarrocaIgor Flautista100% (2)
- Cifra Club - Raul Seixas - Maluco BelezaDocumento5 páginasCifra Club - Raul Seixas - Maluco BelezaLauroBorbaAinda não há avaliações
- Vestibular Sao 2018-2 PDFDocumento35 páginasVestibular Sao 2018-2 PDFBraulio50% (2)
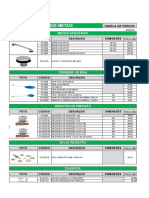
- Cromos Metais - Tabela de PreçosDocumento1 páginaCromos Metais - Tabela de PreçosEdison LeiteAinda não há avaliações
- Atos 2 (Gabriela Rocha) - Partituras e PartesDocumento45 páginasAtos 2 (Gabriela Rocha) - Partituras e PartesJoelson Trpt100% (1)
- Novela - Juntos Na NoiteDocumento72 páginasNovela - Juntos Na NoitevaleretoAinda não há avaliações
- Simulado 15Documento3 páginasSimulado 15Paulo Marcos Ferreira AndradeAinda não há avaliações
- Ayrton Benck - Fundamentos Técnicos - Rotina Prática DiáriaDocumento2 páginasAyrton Benck - Fundamentos Técnicos - Rotina Prática DiáriaCleiton Lucio Da Costa LucioAinda não há avaliações
- AEC Planificacao Oficina Artes 2021-2022Documento2 páginasAEC Planificacao Oficina Artes 2021-2022arteseideiasAinda não há avaliações
- Artigo - A Interferência Eletromagnética Nas Redes de ComputadoresDocumento15 páginasArtigo - A Interferência Eletromagnética Nas Redes de ComputadoresJosé Maurício Dos Santos PinheiroAinda não há avaliações
- Cópia de Beatriz SilvaDocumento5 páginasCópia de Beatriz SilvaanabeattryzbAinda não há avaliações
- Regência Verbal e Nominal - ExercicioDocumento2 páginasRegência Verbal e Nominal - ExercicioElaine SilvaAinda não há avaliações
- Federico Garcia LorcaDocumento11 páginasFederico Garcia LorcaRepartição da FlorAinda não há avaliações
- Sync em Ethernet V2Documento51 páginasSync em Ethernet V2paulo_cyrilloAinda não há avaliações
- KDL40R355B MKSP FolhetoDocumento2 páginasKDL40R355B MKSP FolhetoStefanoViganóAinda não há avaliações