Você também pode gostar
- Configuração de segurança e acesso no SynchroDocumento13 páginasConfiguração de segurança e acesso no SynchroDenis MartinsAinda não há avaliações
- Ferramenta BIM para planejamento 4D – SynchroDocumento29 páginasFerramenta BIM para planejamento 4D – SynchroDenis MartinsAinda não há avaliações
- Ferramenta BIM para planejamento 4D – SynchroDocumento17 páginasFerramenta BIM para planejamento 4D – SynchroDenis MartinsAinda não há avaliações
- Importação de dados planejamento e geometrias SynchroDocumento28 páginasImportação de dados planejamento e geometrias SynchroDenis MartinsAinda não há avaliações
- Ferramenta BIM para planejamento 4D – SynchroDocumento28 páginasFerramenta BIM para planejamento 4D – SynchroDenis MartinsAinda não há avaliações
- Ferramenta BIM Synchro para planejamento 4DDocumento24 páginasFerramenta BIM Synchro para planejamento 4DDenis MartinsAinda não há avaliações
- Ferramenta BIM Planejamento 4D Synchro 04Documento30 páginasFerramenta BIM Planejamento 4D Synchro 04Denis MartinsAinda não há avaliações
- Ferramenta BIM Planejamento 4D Synchro 05Documento7 páginasFerramenta BIM Planejamento 4D Synchro 05Denis MartinsAinda não há avaliações
- Ferramenta BIM para planejamento 4DDocumento39 páginasFerramenta BIM para planejamento 4DDenis MartinsAinda não há avaliações
- Manual de Dispositivos de Drenagem Do DNITDocumento103 páginasManual de Dispositivos de Drenagem Do DNITPaulo Frota100% (1)
- Estruturas de Concreto Armado - FuscoDocumento477 páginasEstruturas de Concreto Armado - FuscoVALMIK100% (1)
- 01 - Notas de Aula-Fundações-Introdução-Rev-02-2sem-2021Documento42 páginas01 - Notas de Aula-Fundações-Introdução-Rev-02-2sem-2021Denis MartinsAinda não há avaliações
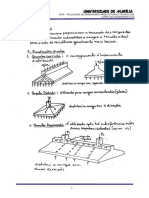
- SapatasDocumento120 páginasSapatasSamaraPimentelAinda não há avaliações
- Arrimo 2 FDocumento24 páginasArrimo 2 FVinicius Zamai SevaAinda não há avaliações
- Aula08 - Fundações (Edifícios Grande Porte)Documento206 páginasAula08 - Fundações (Edifícios Grande Porte)Denis MartinsAinda não há avaliações
- Guia Projetos Macstars 2000Documento22 páginasGuia Projetos Macstars 2000Javier Choque ContrerasAinda não há avaliações
- Aula Fundações Edifícios AltosDocumento37 páginasAula Fundações Edifícios AltosDenis MartinsAinda não há avaliações
- DISC FCC 2013 Caixa Engenheiro Civil ProvaDocumento7 páginasDISC FCC 2013 Caixa Engenheiro Civil ProvaDenis MartinsAinda não há avaliações
- Monitores de posição série MB200 para atuadores rotativosDocumento8 páginasMonitores de posição série MB200 para atuadores rotativosDenis MartinsAinda não há avaliações
- Apostila Fund II-UnimarDocumento53 páginasApostila Fund II-UnimarDenis MartinsAinda não há avaliações
- Explicando Os Jogos PDFDocumento4 páginasExplicando Os Jogos PDFDenis MartinsAinda não há avaliações
- Automatização do sistema de controle de acesso e pesagem no Porto TiplamDocumento13 páginasAutomatização do sistema de controle de acesso e pesagem no Porto TiplamDenis MartinsAinda não há avaliações
- Conhec Basicos EngenhDocumento5 páginasConhec Basicos EngenhDenis MartinsAinda não há avaliações
- DISC FCC 2013 Caixa Engenheiro Civil ProvaDocumento5 páginasDISC FCC 2013 Caixa Engenheiro Civil ProvaDenis MartinsAinda não há avaliações
- Prova Conhecimentos Especificos - Engenharia Civil 4Documento4 páginasProva Conhecimentos Especificos - Engenharia Civil 4Denis MartinsAinda não há avaliações
- DISC FCC 2013 Caixa Engenheiro Civil ProvaDocumento7 páginasDISC FCC 2013 Caixa Engenheiro Civil ProvaDenis MartinsAinda não há avaliações
- Preparatório para o Exame PMP® - T14 - Simulado - Grupo PlanejamentoDocumento31 páginasPreparatório para o Exame PMP® - T14 - Simulado - Grupo PlanejamentoDenis MartinsAinda não há avaliações
- Recomendações Técnicas para Equipamentos Sociais (RTESDocumento395 páginasRecomendações Técnicas para Equipamentos Sociais (RTESDenis MartinsAinda não há avaliações
- Projeto de Norma ABNT NBR 9050 2008Documento17 páginasProjeto de Norma ABNT NBR 9050 2008Victor Fernando Aires ArrudaAinda não há avaliações
- Forense Digital e DocumentosDocumento96 páginasForense Digital e DocumentosTati LaraAinda não há avaliações
- Roteiro para cálculos de índices antropométricos no software WHO AnthroDocumento17 páginasRoteiro para cálculos de índices antropométricos no software WHO AnthroSpin4ll100% (2)
- Econometria Aplicada com EViewsDocumento202 páginasEconometria Aplicada com EViewsPedro Fernandes50% (2)
- Manual WinisisDocumento0 páginaManual WinisisCriss Da Veiga0% (1)
- Apostila SolidWorks 2016Documento132 páginasApostila SolidWorks 2016Everaldo Moraes100% (5)
- Apostila Excel AvançadoDocumento4 páginasApostila Excel AvançadoMoacir ChavesAinda não há avaliações
- TCC Desenvolvimento de Um Robo HexapodeDocumento140 páginasTCC Desenvolvimento de Um Robo HexapodeRodrigo Filho100% (1)
- Python ComandosDocumento20 páginasPython ComandosLuan Moreira Grilo100% (1)
- Cálculo Numérico - Lista de Exercícios UTFPR Pato BrancoDocumento1 páginaCálculo Numérico - Lista de Exercícios UTFPR Pato BrancoPablo Henrique Seibert JahnoAinda não há avaliações
- Positron - Manual Alarme l2005 Cyber PX FX ExactDocumento2 páginasPositron - Manual Alarme l2005 Cyber PX FX Exactjohn526259% (39)
- Gabriela Ribeiro Atividade3Documento25 páginasGabriela Ribeiro Atividade3Gabriela RibeiroAinda não há avaliações
- Referências bibliográficas no LatexDocumento6 páginasReferências bibliográficas no LatexElvis Richard Tello OrtizAinda não há avaliações
- Tipos de matrizes: propriedades e exemplosDocumento5 páginasTipos de matrizes: propriedades e exemplosDiegoGonçalvesDmgAinda não há avaliações
- Curso Profissional Access BDDocumento4 páginasCurso Profissional Access BDPaulo CoelhoAinda não há avaliações
- Cálculo Numérico no Curso de Engenharia QuímicaDocumento3 páginasCálculo Numérico no Curso de Engenharia QuímicaLucas MatosAinda não há avaliações
- Mapeamento criminalidade SIG combate violênciaDocumento101 páginasMapeamento criminalidade SIG combate violênciaEder JuniorAinda não há avaliações
- Samba4 Integrado Com Samba - Winbind e PAMDocumento10 páginasSamba4 Integrado Com Samba - Winbind e PAMAnderson MendesAinda não há avaliações
- Todos Os Comandos .Bat para Win7Documento7 páginasTodos Os Comandos .Bat para Win7jehora_17100% (1)
- ESR - Descobrindo A Senha de Administrador Do Windows - INFOHelpDocumento13 páginasESR - Descobrindo A Senha de Administrador Do Windows - INFOHelpemersonsfc100% (1)
- Complemento Ortogonal - Algebra Linear IiDocumento8 páginasComplemento Ortogonal - Algebra Linear IiCurso Raízes100% (4)
- Hannover BR 9000 (Manual+dicas Detalhadas)Documento7 páginasHannover BR 9000 (Manual+dicas Detalhadas)Marckos Franco0% (1)
- Af Não-Determinísticos Equivalência Entre Afnd e AfdDocumento40 páginasAf Não-Determinísticos Equivalência Entre Afnd e AfdFelipe LeiteAinda não há avaliações
- ManualDocumento32 páginasManualValdiney SilvaAinda não há avaliações
- Resumo de OctaveDocumento14 páginasResumo de OctaveChristopher Rodrigues VieiraAinda não há avaliações
- Nota Prova Dissertativa Ipatinga Guarda Municipal 57638097294426473552Documento12 páginasNota Prova Dissertativa Ipatinga Guarda Municipal 57638097294426473552LucianoAinda não há avaliações
- Apostila 06 Inequações e Sistemas de Inequações de 1º GrauDocumento8 páginasApostila 06 Inequações e Sistemas de Inequações de 1º GrauAnaMusicAinda não há avaliações
- Exer 1Documento4 páginasExer 1Paulo DiasAinda não há avaliações
- Senhas BaumerDocumento3 páginasSenhas Baumerdaniel80% (5)
- Removendo - Vírus JWGKVSQDocumento4 páginasRemovendo - Vírus JWGKVSQFlávio B CardosoAinda não há avaliações
- Tutorial de Como Fazer Um Recorte No EnviDocumento30 páginasTutorial de Como Fazer Um Recorte No EnviInalina MarcioAinda não há avaliações