Você também pode gostar
- 10 Aula - Condensadores e Bobines 1516Documento21 páginas10 Aula - Condensadores e Bobines 1516Filipe PradoAinda não há avaliações
- NBR - 5419-4 - 2015 - Proteção Contra Descargas Atmosféricas - Parte 4 - Sistemas Elétricos e Eletrônicos Internos Na Estrutura PDFDocumento99 páginasNBR - 5419-4 - 2015 - Proteção Contra Descargas Atmosféricas - Parte 4 - Sistemas Elétricos e Eletrônicos Internos Na Estrutura PDFIgor Araújo100% (1)
- GeradorsincronosDocumento3 páginasGeradorsincronosLuizAinda não há avaliações
- Guia Rápido para AltiumDocumento26 páginasGuia Rápido para AltiumLuizAinda não há avaliações
- Medidor de EnergiaDocumento7 páginasMedidor de EnergiaLuizAinda não há avaliações
- Apostila de Maquinas Hidraulicas - V19Documento7 páginasApostila de Maquinas Hidraulicas - V19LuizAinda não há avaliações
- Cap8 CamesDocumento26 páginasCap8 CamesBruno Costa de MirandaAinda não há avaliações
- As Ondas Sonora FolhaDocumento4 páginasAs Ondas Sonora FolhaLord RavenAinda não há avaliações
- Relatório RatoeiraDocumento8 páginasRelatório RatoeiraR KanekiAinda não há avaliações
- 2 Lista de Questões Sobre A 2 e 3 Lei de Newton PDFDocumento2 páginas2 Lista de Questões Sobre A 2 e 3 Lei de Newton PDFFábio LimaAinda não há avaliações
- Maquete 1Documento10 páginasMaquete 1mmaarroomm81Ainda não há avaliações
- Eletromagnetismo ResumoDocumento36 páginasEletromagnetismo ResumoisabelsduarteAinda não há avaliações
- Laycock, Jerwood, 2001. Pelvic Floor Muscle Assessment - The PERFECT Scheme (1) .En - PTDocumento12 páginasLaycock, Jerwood, 2001. Pelvic Floor Muscle Assessment - The PERFECT Scheme (1) .En - PTRaquel silvaAinda não há avaliações
- Manual de PRG Paradox 01Documento4 páginasManual de PRG Paradox 01Paulo Cezar CremaAinda não há avaliações
- 14 - Motores Elétricos TrifásicosDocumento11 páginas14 - Motores Elétricos Trifásicoswagner machado de moraesAinda não há avaliações
- Mecânica Aplicada - Esforcos03Documento42 páginasMecânica Aplicada - Esforcos03ArkantosAinda não há avaliações
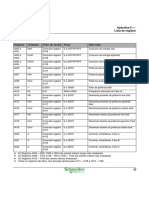
- PM210 - Lista de Registros ModbusDocumento9 páginasPM210 - Lista de Registros ModbusGustavo Fernandes TomeAinda não há avaliações
- Modelo de Livro para Editora Unb Galeria OverleafDocumento39 páginasModelo de Livro para Editora Unb Galeria OverleafDiogo JuniorAinda não há avaliações
- Apostila TransformadoresDocumento30 páginasApostila Transformadoresapi-3837584100% (17)
- Memorial Descritivo e Relatorio Instalacao Eletrica IndustrialDocumento17 páginasMemorial Descritivo e Relatorio Instalacao Eletrica IndustrialAdriano KoehlerAinda não há avaliações
- 3a Lista de ExerciciosDocumento2 páginas3a Lista de ExerciciosCarlos JuniorAinda não há avaliações
- Atividade Prática - EletrônicaDocumento9 páginasAtividade Prática - EletrônicaJuliano Martins67% (12)
- Máquinas Elétricas - ELE 2Documento3 páginasMáquinas Elétricas - ELE 2Gielly CamposAinda não há avaliações
- Aula Virtual - Lista #1 - Movimentos (1 1B)Documento3 páginasAula Virtual - Lista #1 - Movimentos (1 1B)Fabio MeisterAinda não há avaliações
- Fisica 1 Exercicios Gabarito 20Documento4 páginasFisica 1 Exercicios Gabarito 20comentadaAinda não há avaliações
- Erika de Carvalho Bastone - A Fisica No EspiritismoDocumento19 páginasErika de Carvalho Bastone - A Fisica No Espiritismofabiano_silva6061Ainda não há avaliações
- Ficha 4 FIsica UnizambezeDocumento1 páginaFicha 4 FIsica UnizambezeGuivenio OrlandoAinda não há avaliações
- TCC MarielleDocumento66 páginasTCC MarielleLuiz ClaudioAinda não há avaliações
- Fisica Mod02 Vol02 PDFDocumento144 páginasFisica Mod02 Vol02 PDFSimões TiagoAinda não há avaliações
- The Strange - Tecedor - Beneficios e ReviravoltasDocumento5 páginasThe Strange - Tecedor - Beneficios e ReviravoltasIlan MendesAinda não há avaliações
- Eletronica1 Basica PDFDocumento147 páginasEletronica1 Basica PDFSjf NetAinda não há avaliações
- Easygen 300 - PT37217ADocumento4 páginasEasygen 300 - PT37217ASandro Muniz SouzaAinda não há avaliações
- Weg ContatoresDocumento3 páginasWeg ContatoresQuarkInstalacoesAinda não há avaliações
- Planificação F4Documento7 páginasPlanificação F4Paulo Nunes AlmeidaAinda não há avaliações